WitMotion WT61 IMU (MPU6050) – 6-осевой акселерометр и гироскоп с выводом угла, Kalman AHRS, TTL Serial, 20/100 Гц, 3.3–5 В для Arduino/Raspberry Pi/ПК
WitMotion WT61 IMU (MPU6050) – 6-осевой акселерометр и гироскоп с выводом угла, Kalman AHRS, TTL Serial, 20/100 Гц, 3.3–5 В для Arduino/Raspberry Pi/ПК
WitMotion
Не удалось загрузить сведения о доступности самовывоза
Обзор
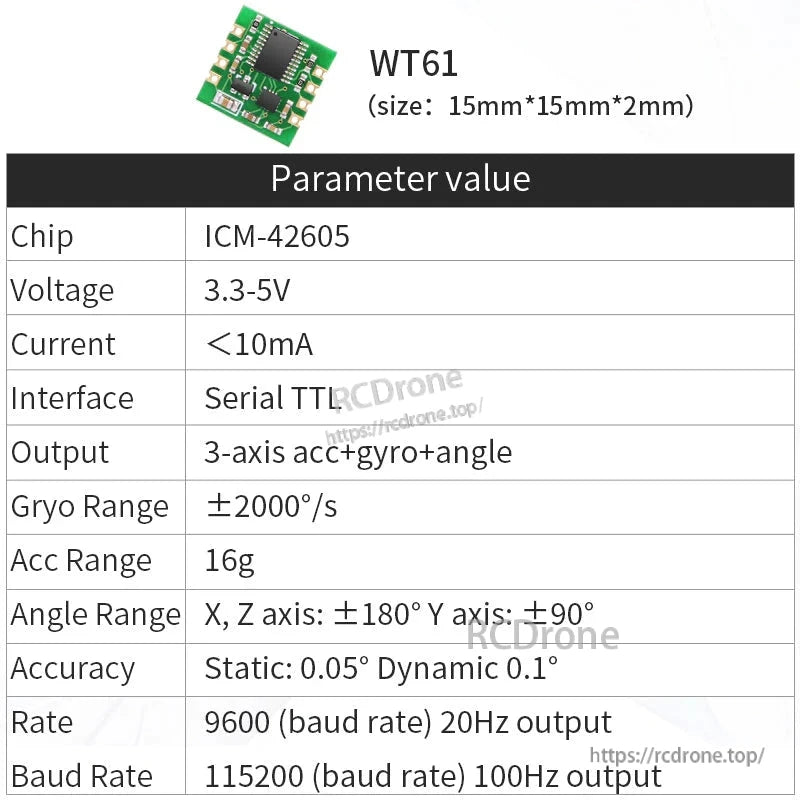
Датчик ориентации WitMotion WT61 с 6 осями MEMS выводит 3-осевое ускорение, 3-осевую угловую скорость и объединённый угол (крен/тангаж/рыскание). Он использует 48 МГц МК с встроенным ИМУ (MPU6050, согласно наименованию модели) и динамическое слияние WitMotion + фильтрацию Калмана для обеспечения высокой стабильности, низкого шума и точных угловых результатов. Модуль общается через Серийный TTL и имеет компактные размеры (15.24 × 15.24 × 2 мм, ~1 г), что облегчает его встраивание в IoT-устройства, роботы, мобильную технику, структурный мониторинг, потребительскую электронику и VR-устройства.
Ключевые особенности
-
3 выхода: ускорение, угловая скорость и угол (ориентация).
-
Алгоритм слияния: динамическое слияние + фильтрация Калмана; наследие алгоритма ориентации уровня спутника; точность угла 0.05° (статическая), 0.1° (динамическая).
-
Высококачественное оборудование: 48 МГц ядро MCU, стабильный силовой чип, медные площадки с золотым покрытием, встроенный MEMS сенсор.
-
Маленький & свет: 15.24 × 15.24 × 2 мм, ~1 г; поддерживается горизонтальная/вертикальная установка.
-
Выбор скорости передачи данных & бод: 20 Гц / 100 Гц скорость возврата; 9600 / 115200 бит/с.
-
Приложение для Android + программное обеспечение для Windows: построение в реальном времени, запись, просмотр сырых данных, экспорт в TXT, 3D демонстрационный просмотрщик и богатая конфигурация (полоса пропускания, скорость вывода, размещение, пороги, сон, сброс по оси Z).
-
Примеры SDK &: Matlab, Python, Raspberry Pi, STM32, ROS, Arduino, C/C++.
-
Документация & инструменты: технический паспорт, руководство, MiniIMU.exe, драйверы CH340/CP2102, демонстрационные видео.
-
Качество & поддержки: отчет о заводской калибровке представлен; RoHS, CE, ISO 9001.
Технические характеристики
| Товар | Детали |
|---|---|
| Модель / Бренд | WT61 / WitMotion |
| Напряжение питания | 3.3 В ~ 5 В |
| Ток | < 10 мА |
| Интерфейс | Серийный TTL |
| Содержимое вывода | 3-осевое ускорение, 3-осевая угловая скорость, угол |
| Диапазон ускорения | ±2/±4/±8/±16 g (адаптивный) |
| Диапазон гироскопа | ±2000 °/с |
| Диапазон угла | X, Z: ±180°; Y: ±90° |
| Точность угла | X/Y статическая 0.05°; динамическая 0.1° |
| Стабильность (смещение) | Ускорение: 0.01 g; Гироскоп: 0.05 °/с; Угол (XY): 0.01° |
| Коэффициент возврата | 20 Гц / 100 Гц |
| Скорость передачи данных | 9600 / 115200 бод |
| Разрешение ускорения | ±2 g: 0.061 mg/LSB (16384 LSB/g); ±4 g: 0.12 mg/LSB (8192 LSB/g); ±8 g: 0.25 mg/LSB (4096 LSB/g); ±16 g: 0.5 mg/LSB (2048 LSB/g) |
| Размер / Вес | 15.24 × 15.24 × 2 мм (0.6″ × 0.6″ × 0.08″) / ~1 г |
| Рабочая температура | –40 °C до +85 °C |
| Определение оси | Декартовы координаты, правило правой руки |
| Монтаж | Горизонтальный или вертикальный |
Выводы & Механические
Контур платы (мм): A = 15.24, B = 15.24, C = 2.54, D = 12.7, E = 2.
Выводы:
| # | Имя | Функция |
|---|---|---|
| 1 | D0 | NC зарезервировано |
| 2 | VCC | 3.3–5 V |
| 3 | RT | Серийные данные вход, Уровень TTL |
| 4 | TX | Серийные данные выход, Уровень TTL |
| 5 | GND | Земля |
| 6 | SWIM | Интерфейс данных SWIM |
| 7 | D2 | NC зарезервировано |
| 8 | VCC | 3.3–5 V |
| 9 | SCL | NC зарезервировано |
| 10 | SDA | NC зарезервировано |
| 11 | GND | Земля |
| 12 | D3 | NC зарезервировано |
Схема подключения MCU (показана на диаграмме): TTL последовательный интерфейс к хосту MCU с TX↔RX перекрестным соединением (VCC, TX, RX, GND).
Программное обеспечение, приложения & Инструменты
-
Приложение для Android: подключение через USB-to-TTL + OTG телефона; графики в реальном времени для Acc/Gyro/Angle; Кнопка записи; меню модулей (3-осевой / 6-осевой / 9-осевой / BLE5.0 / WT901-WIFI); богатые Страницы конфигурации (калибровка акселерометра, направление установки, скорость извлечения, полоса пропускания измерения, порог статического обнаружения, выбор шаблона).
-
Windows ПК (MiniIMU.exe): живые угломеры, кривые в реальном времени (“Надежные измерения данных”), Хранение данных & Экспорт (сырые и обработанные данные в формате TXT/CSV), Меню конфигурации (скорость передачи 115200, режим=Серийный, выбор направления, полоса пропускания e.g. , 94 Гц, сон, сброс оси Z на 0°).
-
3D Демонстрация: визуализирует движение сенсора; 3D исходный код предоставляется (как указано).
-
Тестовая установка: необязательный кламп с подключением и работой для проводки без пайки (продается отдельно).
Алгоритмы & Производительность
-
Алгоритм WitMotion × Фильтр Калмана: основан на методах определения положения спутников в аэрокосмической отрасли ; сочетает кинетическую фузию, цифровую фильтрацию, оценку состояния; обеспечивает заявленную 0.05°/0.1° точность угла и отличная стабильность смещения/низкий уровень шума (график и значки показаны).
Типичные применения
Устройства IoT, мониторинг окружающей среды, защита строительных конструкций, робототехника & автоматизация, нефть & энергетика, мобильные машины , горнодобывающая промышленность, потребительская электроника, VR гаджеты.
Соответствие & Поддержка
-
Показанные сертификаты: Отчет о калибровке, RoHS, CE, ISO 9001.
-
Сравнительные заметки: тестировалось на заводе перед отправкой, доступен SDK, 12-месячная гарантия, пожизненная техническая поддержка от WitMotion R&D.
Заметки & Аксессуары
-
Включено: модуль WT61.
-
Опционально: USB-to-TTL преобразователь, телефонный OTG адаптер, акриловый тестовый стенд зажим.
-
Используйте правую систему координат и следуйте горизонтальным/вертикальным инструкциям по установке, указанным в программном обеспечении, для достижения наилучшей точности.
Детали

WitMotion WT61 IMU обеспечивает точность угла наклона 0.05 градуса, цифровую фильтрацию, алгоритм слияния и включает функции ускорения, гироскопа, угла, вибрации, MCU и фильтрации.

WitMotion WT61 IMU предлагает выходные данные по 3-осевому ускорению, гироскопу и углу. Он поддерживает 3.3V-5V, низкий ток, последовательный TTL, адаптивный диапазон ±2/4/8/16g, высокую точность, компактный размер, легкий вес и широкий температурный диапазон.

WitMotion WT61 IMU предлагает высокую точность с фильтрацией Калмана, сертификаты включают RoHS, CE, ISO-9001.Особенности: 48MHz MCU, MEMS сенсор, стабильный силовой чип и интерфейс с золотым покрытием.

Алгоритм WitMotion x фильтр Калмана. Алгоритм WitMotion основан на алгоритме определения положения спутника в аэрокосмической отрасли, в сочетании с фильтрацией Калмана и динамической фузией движения. Точность угла: ось X, Y: 0.05° (статическая), 0.1° (динамическая). График отображает угловые данные с течением времени, с синими, красными и желтыми линиями, представляющими различные измерения или отфильтрованные выходные данные. Временные метки варьируются от 15:21:09:210 до 15:21:15:223. Вертикальная ось охватывает диапазон от -180 до 180 градусов.

WitMotion WT61 IMU для IoT, мониторинга окружающей среды, робототехники, автоматизации, горного дела, мостов, VR-устройств и промышленных приложений.

WitMotion IMU обеспечивает высокую точность, стабильность, компактные размеры, превосходные компоненты, SDK, заводское тестирование и поддержку на протяжении всего срока службы.Включает фильтрацию Калмана, алгоритм слияния и 12-месячную гарантию, превосходя другие.

WitMotion WT61 IMU имеет 12-контактную компоновку с VCC, GND, TX, RX, SCL, SDA, SWIM и резервными портами; включает размеры в мм.

WitMotion WT61 IMU подключается через USB к адаптеру OTG для просмотра и записи данных на смартфоне. Многофункциональное приложение для Android отображает данные датчиков в реальном времени, включая углы, ускорение и временные метки, с возможностями настройки и ведения журнала данных.

WitMotion WT61 IMU предлагает простую настройку, функциональность "подключи и работай" и измерения положения в реальном времени с показаниями углов.

WitMotion WT61 IMU предлагает калибровку, измерения в реальном времени и экспорт данных. Отображает и сохраняет ускорение, угловую скорость, магнитное поле и сырые данные в формате TXT.

3D демонстрация интуитивно отображает движение сенсора. SDK поддерживает Matlab, Python, Raspberry Pi, STM32, ROS, Arduino и C++/C#. TTL последовательное соединение с MCU; TX и RX перекрестно соединены.

3D демонстрация визуализирует движение сенсора с моделями автомобиля, шлема, куба и дрона. SDK поддерживает Matlab, Python, Raspberry Pi, STM32, ROS, Arduino и C++/C#. Последовательное соединение через TTL связывает MCU и модуль с перекрестно соединенными TX и RX.

Тестирование IMU включает 3-осевой поворотный стол, вибрационные колебания, температурные экстремумы, старение и оценки при высокой температуре.


WitMotion WT61 IMU предлагает частоту возврата 20-100 Гц, напряжение 3.3-5 В и определяет ускорение, угол и гироскоп. Поддерживает TTL интерфейс, совместим с Android, ПК, MCU и Arduino.
Related Collections