








CQ230 Assembly Drone Development Kit - Raspberry Pi 4B Pixhawk Ardupilot Industrial Open-Source Programmerbar DIY Drone Kit med anti-kollisionsställ
CQ230 Assembly Drone Development Kit - Raspberry Pi 4B Pixhawk Ardupilot Industrial Open-Source Programmerbar DIY Drone Kit med anti-kollisionsställ
RCDrone
Det gick inte att ladda hämtningstillgänglighet
Översikt
CQ230 Assembly Drone Development Kit är ett kompakt, öppen källkod DIY drönare plattform som drivs av Raspberry Pi 4B och Pixhawk flygledare. Med en 230 mm hjulbas, anti-kollisionsram och ett 4S (16,8V) kraftsystem är denna drönare idealisk för att lära sig och experimentera med programmerbara funktioner med öppen källkod. Plattformen är fullt utrustad för uppgifter som waypointnavigering, dataövervakning och videostreaming i realtid, vilket gör den till ett utmärkt val för både utvecklare och nybörjare.
Nyckelfunktioner
- Kompakt design: Med en storlek på 360 mm x 360 mm x 300 mm är drönaren idealisk för små utrymmen.
- Anti-kollisionsställ: Helkolfiber anti-kollisionsram säkerställer hållbarhet och skydd.
- Raspberry Pi 4B Integration: Förbättrad med Ubuntu 20.04 för smidig drift och utveckling.
- Framework med öppen källkod: Drivs av Ardupilot, som stöder Dronekit, MAVLink och ROS.
- Programmerbar Uppgifter: Kan utföra autonom navigering, dataövervakning i realtid och visuell bearbetning.
- Waypointnavigering: Ställ in rutter med GPS-baserad noggrannhet.
- Dataöverföring i realtid: WiFi-aktiverad dataöverföring till markstationer.
- Visuell navigering: Dubbla kamerasystem för exakt inomhusnavigering och undvikande av hinder.
- Programmerbara kontroller: Använd Dronekit-Python för att skapa anpassade flygkommandon.
- Systemsimulering: Kombinera SITL-simulering för sömlös testning av funktionalitet.
Specifikationer
| Parameter | Detaljer |
|---|---|
| Modell | CQ230 |
| Hjulbas | 230 mm |
| Batteri | 4S (16,8V) |
| Flygtid | 7 minuter |
| Lastkapacitet | 200 g |
| Vindmotstånd | Nivå 3-4 |
| Max hastighet | 20 km/h |
| Max flyghöjd | 120m |
| Positioneringsnoggrannhet | 2-3 m (GPS) |
| Vikt | 612g |
| Fjärrkontrollsområde | 700m |
Paket
Grundversion
- Pixhawk 2.4.8 Flight Controller ×1
- M8N GPS ×1
- Ledi MINI PIX Power Module ×1
- CUAV WiFi-telemetri ×1
- 30A ESC ×4
- 5045 Propeller ×4
- CQ230 Ram ×1
- A400 balansladdare ×1
- 4S 2300mAh batteri ×1
- 2205 Motor ×4
- FS-i6 fjärrkontroll ×1
- BB Alarm Summer ×1
- MF-01 Optisk flödesmodul ×1
Visuell version
- Pixhawk 2.4.8 Flight Controller ×1
- M8N GPS ×1
- Ledi MINI PIX Power Module ×1
- CS-kamera ×1
- 30A ESC ×4
- 5045 Propeller ×4
- CQ230 Ram ×1
- BB Alarm Summer ×1
- MF-01 Optisk flödesmodul ×1
- A400 balansladdare ×1
- 4S 2300mAh batteri ×1
- 2205 Motor ×4
- FS-i6 fjärrkontroll ×1
- Raspi 4B-4G inbyggd dator ×1 set
- T265 visuell kamera ×1
Ansökningar
- Leverans: Transportera lätta föremål effektivt.
- Utbildningsutveckling: Idealisk för studenter och forskare att utforska drönarsystem.
- Visuell bearbetning: Använd OpenCV för avancerad videoströmning och analys.
- Navigationsexperiment: Experimentera med autonom GPS-baserad flyg- och positionsspårning.
Ytterligare anmärkningar
- Systemet inkluderar Ubuntu 20.04 för ett förbättrat programmeringsgränssnitt.
- Ardupilots robusta ekosystem säkerställer skalbarhet och mångsidighet i drönarapplikationer.
- Ett komplett inlärningspaket med tutorials för nybörjare och proffs.
Detaljer
CQ230 Drönarsystem med öppen källkod

Pixhawk: Drönarhårdvarusystem
Använder Pixhawk 2.4.8-kontrollern, utrustad med den nya standard 32-bitarsprocessorn STM32F427 och parad med 5611-barometern. Det är en kostnadseffektiv kontrollenhet med öppen källkod med rika gränssnittsalternativ.

ArduPilot: Drönarprogramvara
Drönarens mjukvarusystem – i huvudsak kontrollfirmware – använder det allmänt antagna open source-projektet ArduPilot.
(ArduPilot tillhandahåller ett avancerat, fullt utrustat och pålitligt autopilotprogram med öppen källkod.)
Den kan styra alla tänkbara drönarsystem. För dem som älskar teknik, drönare och att utforska, kommer förståelse för ArduPilot att introducera dig till en fascinerande och engagerande värld.

ArduPilot har installerats i över 1 000 000 drönarsystem världen över. Utrustad med avancerade dataloggnings-, analys- och simuleringsverktyg är det ett grundligt testat och pålitligt autopilotsystem. Den används också av stora organisationer och företag som NASA, Intel, Insitu, Boeing och många institut och universitet runt om i världen för testning och utveckling.

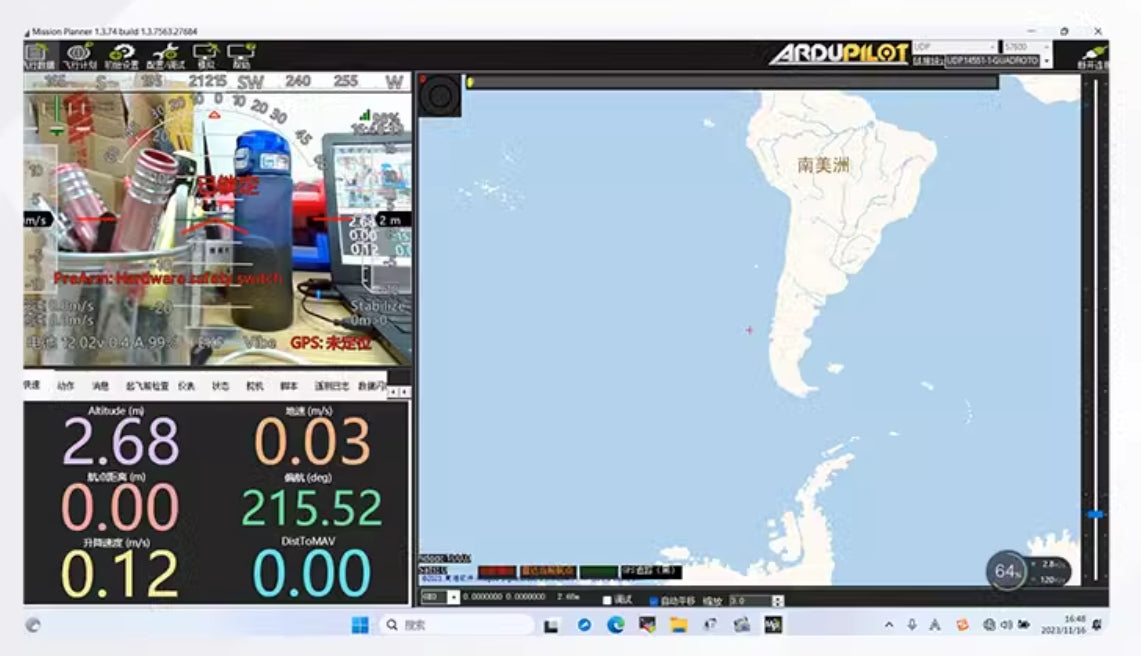
Mission Planner Ground Control Station
Drag:
- Verktyg för inställning av drönare och parameterinställning;
- Ställ in flygvägar på kartor, så att drönare kan följa förinställda rutter automatiskt;
- Välj uppdragskommandon från rullgardinsmenyerna för att styra drönaren;
- Ladda ner och analysera loggar;
- Utför simuleringar med SITL (Software In The Loop) system;
- Fler funktioner väntar på din upptäckt, och möjligheterna slutar inte här...


| Fördefinierade funktioner | Grundversion | Visuell version |
|---|
| Linjeteckning | ✓ | ✓ |
| Höjdhållning, svävning, stabilisering | ✓ | ✓ |
| Återvänd hem, felsäker återvändande | ✓ | ✓ |
| Landning, låg batterinivå | ✓ | ✓ |
| Utomhus GPS-positionering och ruttflygning | ✓ | ✓ |
| Dronekit-Python programmerbar kontroll | ✓ | ✓ |
| WiFi-telemetri för realtidsdataöverföring (ca 5 m räckvidd) | ✗ | ✓ |
| Optisk flödespositionering inomhus, fixering med laserhöjd | ✓ | ✓ |
| Dubbel visuell positioneringsnavigering inomhus, MP-ankarpunkter, ruttflygning, exakt landning med QR-kodigenkänning | ✗ | ✓ |
Lämplig för inomhusflyg
Kompakt design med dimensionerna 360 mm × 360 mm × 300 mm, idealisk för små utrymmen.

Kolfiberram, stark och motståndskraftig mot fall

Antikollisionsringens design skyddar effektivt motorn och propellerbladen för att säkerställa flygsäkerheten;

Förbättrad utbyggbarhet för funktionsutveckling i flera scenarier
Baserat på grundmodellen lägger systemet till Raspberry Pi 4B och har integrerat Raspberry Pi-systemet. Detta system inkluderar:
- Ubuntu 20.04 (operativsystem med öppen källkod med grafiskt gränssnitt)
- Dronekit-Python (ett Python-bibliotek för programmering av drönarkontroll med Dronekit)
- Pymavlink (en Python-implementering av MAVLink-protokollet, som möjliggör programmerbar drönarkontroll med Pymavlink)
- ROS (Robotoperativsystem)
- Mavros (ett kommunikationsprotokoll för att styra drönare via ROS)
- Gstreamer (sändning av videoströmning med låg latens)
- Mavlink-router (distribuerar flygkontrollant MAVLink-data till olika slutpunkter)
- OpenCV (programbibliotek med öppen källkod för behandling av datorsyn)

Baserat på ovanstående system kan drönaren uppnå:
- Programmerbar drönarkontroll med Dronekit-Python
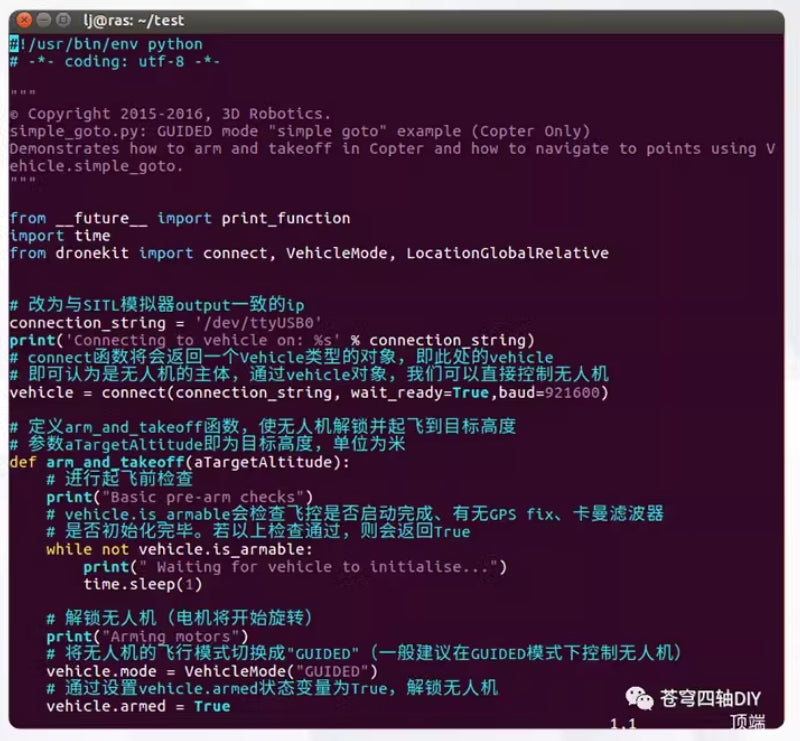
2. ÖPPNA CV Visuell bearbetning
Lade till en CSI-kamera, som möjliggör bildöverföring och efterbehandling:
- Visuella strömmar kan fångas med Raspberry Pi och bearbetas med verktyg som OpenCV.
- Realtids HD-videoströmmar kan också överföras tillbaka till en PC för bearbetning eller skickas till en mobil enhet för granskning.

3. Realtids HD-videoöverföring
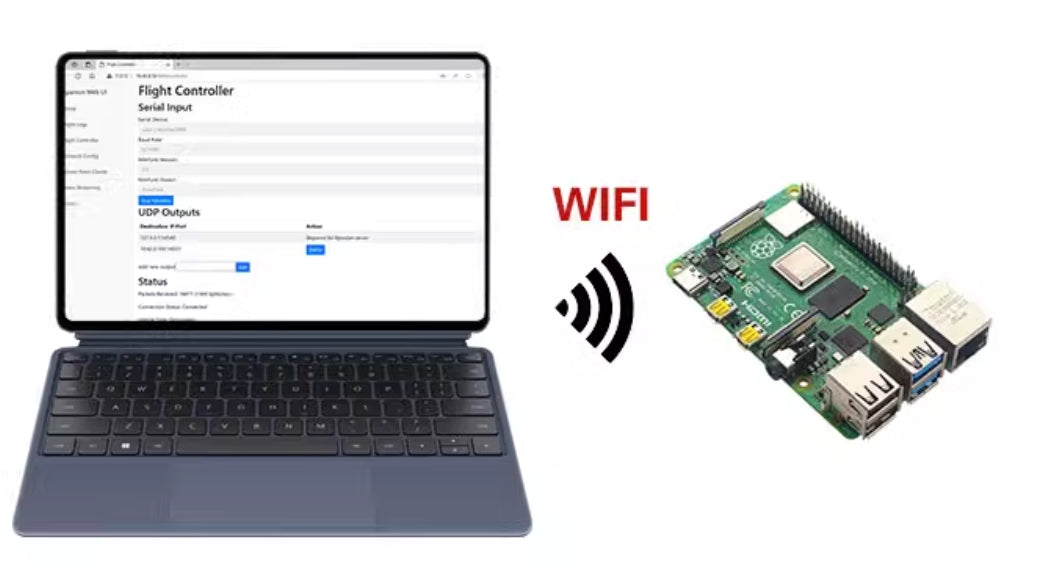
4.Övervakning av markstationsdata
Kommunikation och bildöverföring mellan WiFi-nätverket och PC-markstationen (MP) kan åstadkommas utan att ytterligare överföringsmoduler krävs. Efter att datorn har anslutit till WiFi-hotspot på 4B, kan data- och bildöverföring initieras genom att 10.42.0.10:3000 via en webbläsare.
5. Utveckla ytterligare funktioner och algoritmverifiering baserat på ovanstående system med öppen källkod
Visuell version som stöder självstudier:
Utöver de grundläggande versionshandledningarna tillhandahålls också introduktionsstudier för Raspberry Pi visuell bearbetning.
Related Collections









