








Seti ya Kukuza ya Kusanyiko la CQ230 - Raspberry Pi 4B Pixhawk Ardupilot Industrial Open-Chanzo Inayoweza Kupangwa ya DIY Kit ya Drone yenye Rafu ya Kuzuia mgongano
Seti ya Kukuza ya Kusanyiko la CQ230 - Raspberry Pi 4B Pixhawk Ardupilot Industrial Open-Chanzo Inayoweza Kupangwa ya DIY Kit ya Drone yenye Rafu ya Kuzuia mgongano
RCDrone
Couldn't load pickup availability
Muhtasari
Kifaa cha Ukuzaji cha Ndege cha Mkutano wa CQ230 ni kifaa dhabiti na huria Ndege isiyo na rubani ya DIY jukwaa linaloendeshwa na Raspberry Pi 4B na Pixhawk mtawala wa ndege. Inaangazia gurudumu la 230mm, fremu ya kuzuia mgongano, na mfumo wa nguvu wa 4S (16.8V), ndege hii isiyo na rubani ni bora kwa kujifunza na kufanya majaribio ya vipengele vya programu huria. Jukwaa lina vifaa kamili kwa ajili ya kazi kama vile usogezaji wa njia, ufuatiliaji wa data, na utiririshaji wa video katika wakati halisi, na kuifanya kuwa chaguo bora kwa wasanidi programu na wanaoanza.
Sifa Muhimu
- Ubunifu wa Kompakt: Kwa ukubwa wa 360mm x 360mm x 300mm, drone ni bora kwa nafasi ndogo.
- Rack ya Kuzuia Mgongano: Sura kamili ya kuzuia mgongano wa nyuzi kaboni huhakikisha uimara na ulinzi.
- Ushirikiano wa Raspberry Pi 4B: Imeimarishwa na Ubuntu 20.04 kwa uendeshaji na maendeleo laini.
- Mfumo wa Chanzo Huria: Inaendeshwa na Ardupilot, kusaidia Dronekit, MAVLink, na ROS.
- Inaweza kupangwa Kazi: Ina uwezo wa urambazaji unaojiendesha, ufuatiliaji wa data kwa wakati halisi, na usindikaji wa kuona.
- Urambazaji wa Njia: Weka njia kwa usahihi unaotegemea GPS.
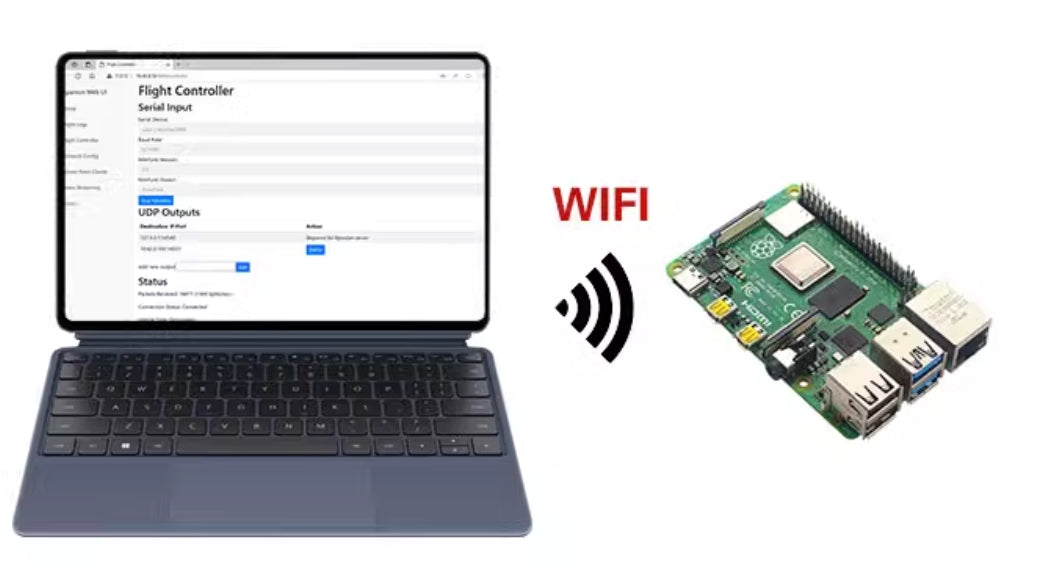
- Usambazaji wa Data ya Wakati Halisi: Uhamisho wa data unaowezeshwa na WiFi hadi vituo vya chini.
- Urambazaji Unaoonekana: Mifumo ya kamera mbili kwa urambazaji sahihi wa ndani na kuepusha vizuizi.
- Vidhibiti Vinavyoweza Kupangwa: Tumia Dronekit-Python kuunda amri maalum za ndege.
- Uigaji wa Mfumo: Unganisha uigaji wa SITL kwa majaribio ya utendakazi bila mshono.
Vipimo
| Kigezo | Maelezo |
|---|---|
| Mfano | CQ230 |
| Msingi wa magurudumu | 230 mm |
| Betri | 4S (16.8V) |
| Wakati wa Ndege | Dakika 7 |
| Uwezo wa Upakiaji | 200g |
| Upinzani wa Upepo | Kiwango cha 3-4 |
| Kasi ya Juu | 20 km/h |
| Urefu wa Juu wa Ndege | 120m |
| Usahihi wa Kuweka | 2-3m (GPS) |
| Uzito | 612g |
| Safu ya Udhibiti wa Mbali | 700m |
Kifurushi
Toleo la Msingi
- Pixhawk 2.4.8 Kidhibiti cha Ndege ×1
- M8N GPS ×1
- Moduli ya Nguvu ya Ledi MINI PIX ×1
- CUAV WiFi Telemetry ×1
- 30A ESC ×4
- 5045 Propela ×4
- Fremu ya CQ230 ×1
- Chaja ya Salio ya A400 ×1
- Betri ya 4S 2300mAh ×1
- 2205 Motor ×4
- Kidhibiti cha Mbali cha FS-i6 ×1
- BB Alarm Buzzer ×1
- Moduli ya Mtiririko wa Macho ya MF-01 ×1
Toleo la Visual
- Pixhawk 2.4.8 Flight Comtawala ×1
- GPS ya M8N ×1
- Moduli ya Nguvu ya Ledi MINI PIX ×1
- Kamera ya CS ×1
- 30A ESC ×4
- 5045 Propela ×4
- Fremu ya CQ230 ×1
- BB Alarm Buzzer ×1
- Moduli ya Mtiririko wa Macho ya MF-01 ×1
- Chaja ya Salio ya A400 ×1
- Betri ya 4S 2300mAh ×1
- 2205 Motor ×4
- Kidhibiti cha Mbali cha FS-i6 ×1
- Kompyuta ya Onboard ya Raspi 4B-4G × Seti 1
- Kamera Inayoonekana ya T265 ×1
Maombi
- Uwasilishaji: Kusafirisha vitu vyepesi kwa ufanisi.
- Maendeleo ya Elimu: Inafaa kwa wanafunzi na watafiti kuchunguza mifumo ya ndege zisizo na rubani.
- Usindikaji wa Visual: Tumia OpenCV kwa utiririshaji na uchanganuzi wa kina wa video.
- Majaribio ya Urambazaji: Jaribio na safari ya ndege inayojiendesha inayotegemea GPS na ufuatiliaji wa nafasi.
Vidokezo vya Ziada
- Mfumo unajumuisha Ubuntu 20.04 kwa kiolesura kilichoboreshwa cha programu.
- Mfumo dhabiti wa ikolojia wa Ardupilot huhakikisha uimara na utengamano katika utumizi wa drone.
- Seti kamili ya kujifunzia yenye mafunzo yanayotolewa kwa wanaoanza na wataalamu.
Maelezo
Mfumo wa Wazi wa Drone wa CQ230

Pixhawk: Mfumo wa Maunzi ya Drone
Hutumia kidhibiti cha Pixhawk 2.4.8, kilicho na kichakataji kipya cha kawaida cha 32-bit STM32F427 na kuoanishwa na baromita ya 5611. Ni kidhibiti cha chanzo-wazi cha gharama nafuu na chaguo tajiri za kiolesura.

ArduPilot: Mfumo wa Programu ya Drone
Mfumo wa programu ya drone-kimsingi mfumo dhibiti-hutumia mradi wa chanzo huria uliopitishwa na wengi ArduPilot.
(ArduPilot hutoa mfumo wa juu zaidi, unaoangaziwa kikamilifu, na unaotegemewa wa programu huria ya uendeshaji otomatiki.)
Inaweza kudhibiti mifumo yote inayoweza kufikiria ya drone. Kwa wale wanaopenda teknolojia, ndege zisizo na rubani, na kuchunguza, kuelewa ArduPilot kutakuletea ulimwengu unaovutia na unaovutia.

ArduPilot imesakinishwa katika mifumo zaidi ya 1,000,000 ya ndege zisizo na rubani duniani kote. Ukiwa na zana za kina za ukataji data, uchanganuzi na uigaji, ni mfumo wa majaribio ya kiotomatiki uliojaribiwa kwa kina na unaotegemewa. Pia hutumiwa na mashirika na makampuni makubwa kama vile NASA, Intel, Insitu, Boeing, na taasisi na vyuo vikuu vingi duniani kote kwa ajili ya majaribio na maendeleo.

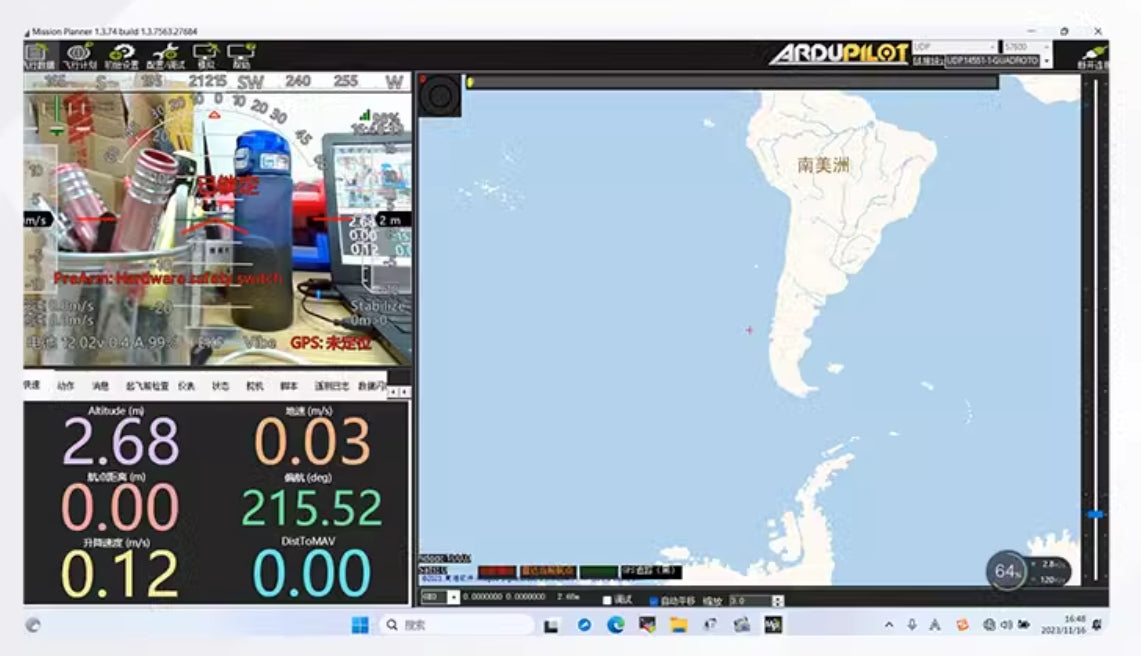
Mission Planner Ground Control Station
Vipengele:
- Urekebishaji wa drone na zana za usanidi wa parameta;
- Weka njia za ndege kwenye ramani, kuwezesha drones kufuata njia zilizowekwa kiotomatiki;
- Chagua amri za misheni kutoka kwa menyu kunjuzi ili kudhibiti drone;
- Pakua na kuchambua kumbukumbu;
- Fanya masimulizi kwa kutumia mfumo wa SITL (Programu Katika Kitanzi);
- Vipengele zaidi vinangoja ugunduzi wako, na uwezekano hauishii hapa...


| Vipengele Vilivyoainishwa | Toleo la Msingi | Toleo la Visual |
|---|
| Mchoro wa Mstari | ✓ | ✓ |
| Kushikilia Mwinuko, Kuelea, Kuimarisha | ✓ | ✓ |
| Rudi Nyumbani, Rudi Kwa Usalama | ✓ | ✓ |
| Inatua, Kutua kwa Betri ya Chini | ✓ | ✓ |
| Nafasi ya GPS ya Nje na Ndege ya Njia | ✓ | ✓ |
| Dronekit-Python Programmable Control | ✓ | ✓ |
| WiFi Telemetry kwa Usambazaji Data kwa Wakati Halisi (Takriban Masafa ya 5m) | ✗ | ✓ |
| Nafasi ya Mtiririko wa Macho ya Ndani, Urekebishaji wa Urefu wa Laser | ✓ | ✓ |
| Urambazaji wa Msimamo wa Ndani wa Ndani, Pointi za Mbunge, Ndege ya Njia, Kutua kwa Usahihi kwa Utambuzi wa Msimbo wa QR | ✗ | ✓ |
Inafaa kwa Usafiri wa Ndani wa Ndani
Muundo thabiti wenye vipimo vya 360mm × 360mm × 300mm, bora kwa shughuli za nafasi ndogo.

Fremu ya nyuzi za kaboni, yenye nguvu na sugu kwa kuanguka

Muundo wa pete ya kuzuia mgongano hulinda kwa ufanisi blade za motor na propeller ili kuhakikisha usalama wa ndege;

Upanuzi Ulioimarishwa kwa Ukuzaji wa Utendaji wa Matukio Mbalimbali
Kulingana na modeli ya msingi, mfumo unaongeza Raspberry Pi 4B na umeunganisha mfumo wa Raspberry Pi. Mfumo huu ni pamoja na:
- Ubuntu 20.04 (mfumo wa uendeshaji wa chanzo-wazi na kiolesura cha picha)
- Dronekit-Python (maktaba ya Python ya kupanga udhibiti wa drone kwa kutumia Dronekit)
- Pymavlink (Utekelezaji wa Python wa itifaki ya MAVLink, kuwezesha udhibiti wa drone unaoweza kupangwa kwa kutumia Pymavlink)
- ROS (Mfumo wa Uendeshaji wa Roboti)
- Mavros (itifaki ya mawasiliano ya kudhibiti drones kupitia ROS)
- Gstreamer (usambazaji wa utiririshaji wa video wenye utulivu wa chini)
- Mavlink-router (husambaza data ya kidhibiti cha ndege cha MAVLink kwa ncha tofauti)
- OpenCV (maktaba ya programu-wazi ya usindikaji wa maono ya kompyuta)

Kulingana na mfumo hapo juu, drone inaweza kufikia:
- Udhibiti wa drone unaoweza kupangwa kwa kutumia Dronekit-Python
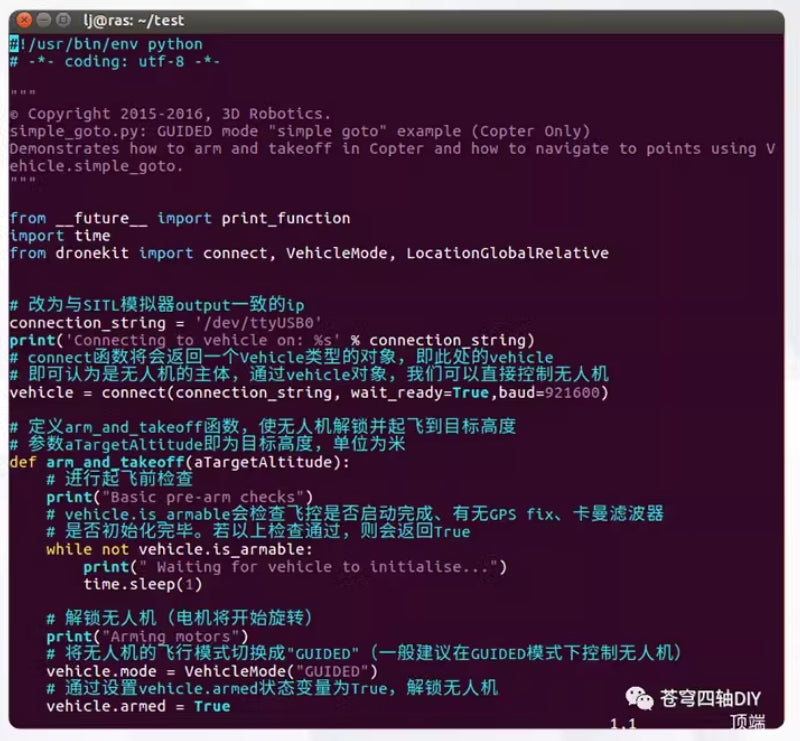
2. FUNGUA CV Visual Processing
Imeongeza kamera ya CSI, inayowezesha utumaji picha na uchakataji baada ya:
- Mitiririko inayoonekana inaweza kunaswa kwa kutumia Raspberry Pi na kuchakatwa na zana kama OpenCV.
- Mitiririko ya video ya HD katika muda halisi pia inaweza kutumwa kwa Kompyuta ili kuchakatwa au kutumwa kwa simu ya mkononi kwa ukaguzi.

3. Usambazaji wa Video wa Muda Halisi wa HD
4.Ufuatiliaji wa Data ya Kituo cha chini
Mawasiliano na usambazaji wa picha kati ya mtandao wa WiFi na kituo cha chini cha PC (MP) kinaweza kupatikana bila kuhitaji moduli za ziada za upitishaji. Baada ya Kompyuta kuunganishwa na mtandao-hewa wa WiFi wa 4B, upitishaji wa data na picha unaweza kuanzishwa kwa kupata 10.42.0.10:3000 kupitia kivinjari.
5. Kukuza Vipengele vya Ziada na Uthibitishaji wa Algorithm Kulingana na Mfumo wa Chanzo Huria Hapo Juu
Mafunzo ya Kusaidia ya Toleo Linaloonekana:
Kando na mafunzo ya toleo la kimsingi, mafunzo ya utangulizi ya usindikaji wa kuona wa Raspberry Pi pia hutolewa.
Related Collections









