




CEREBOTO OpenArm 7DOF Robot Kol Kiti – Kendin Yap veya Montajlı, Açık Kaynak ROS/Python Kontrol
CEREBOTO OpenArm 7DOF Robot Kol Kiti – Kendin Yap veya Montajlı, Açık Kaynak ROS/Python Kontrol
CEREBOTO
Teslim alım stok durumu yüklenemedi
Genel Bakış
CEREBOTO OpenArm 7DOF Robot Kol, üniversiteler, laboratuvarlar, girişimler ve ciddi yapımcılar için tasarlanmış, araştırma düzeyinde, insan ölçeğinde bir robot koldur. 7 serbestlik derecesi, 633 mm kol erişimi, tipik yük kapasitesi 4.1 kg ve maksimum yük kapasitesi 6.0 kg olan OpenArm, yüksek hassasiyetli hareket, güvenli fiziksel etkileşim ve zengin açık kaynak araçları sunar.
Tam el ile montaj için bir DIY donanım kiti veya fabrika kalibreli, kullanıma hazır bir bitmiş kol seçebilirsiniz. Tek kol, çift kol ve dört kol konfigürasyonları mevcuttur.
Ana Özellikler
-
7DOF insan ölçeğinde robot kol – doğal manipülasyon ve teleoperasyon için 160–165 cm insan kol uzunluğuna uyacak şekilde tasarlanmıştır.
-
Yüksek yük kapasitesi &ve stabilite – tipik yük 4.1 kg, maksimum yük 6.0 kg, hafif 5.5 kg kol ağırlığı ile.
-
Geri sürülebilir motorlar &ve uyumlu yapı – insan-robot işbirliği ve kuvvet kontrollü görevler için güvenli, pürüzsüz etkileşim.
-
1 kHz CAN-FD kontrol döngüsü – yüksek performanslı araştırma ve endüstriyel uygulamalar için gerçek zamanlı, düşük gecikmeli kontrol.
-
Tam metal yapı – sertlik ve dayanıklılık için sağlam alüminyum alaşımlı ve paslanmaz çelik ana yapı.
-
Açık kaynak donanım &ve yazılım – derin özelleştirme için açık CAD, PCB, firmware ve kontrol yazılımı.
-
ROS, Python ve C++ desteği – hızlı algoritma geliştirme için resmi ROS entegrasyonu ve Python/C++ API'leri.
-
Zengin ekosistem ve genişleme – tam robotik platformlar için becerikli robotik eller, hareket yakalama eldivenleri ve mobil tabanları destekler.
Teknik Özellikler
-
Serbestlik Dereceleri: 7 DOF her kol için
-
Kol Uzaklığı: 633 mm
-
Tipik Yük: 4.1 kg
-
En Yüksek Yük: 6.0 kg her kol için
-
Kol Ağırlığı: yaklaşık 5.5 kg kol başına
-
Malzemeler: Alüminyum alaşımlı ve paslanmaz çelik yapısal parçalar
-
Kontrol Arayüzü: CAN / CAN-FD, UART (çift/quad-kol versiyonlarında dahil edilen USB2CANFD-X2 adaptörü aracılığıyla)
-
Kontrol Frekansı: 1 kHz'ye kadar CAN-FD döngüsü
-
Yazılım Desteği: ROS çerçevesi, Python API, C++ API
-
Ergonomi: 160–165 cm boyundaki kullanıcılar için uygun kol uzunluğu
Yazılım &ve Açık Kaynak Ekosistemi
OpenArm tamamen açık kaynaklı bir robot kol platformudur.Resmi kaynaklar şunları içerir:
-
Web Sitesi: openarm.dev
-
Dokümantasyon: docs.openarm.dev
-
GitHub: github.com/enactic/openarm
-
Eğitim Videosu: başlangıç için resmi YouTube kılavuzu
Açık CAD, PCB ve firmware dosyaları ile mekanikleri, elektroniği ve kontrol yazılımını değiştirebilir veya kendi araştırma konularınız için yeni sensörler ve uç efektörler ile kolu genişletebilirsiniz.
Tipik Uygulama Senaryoları
OpenArm, aşağıdakiler için çok yönlü, yüksek hassasiyetli bir araştırma ve öğretim platformu olarak tasarlanmıştır:
-
Üniversite robotik dersleri ve laboratuvar deneyleri
-
Araştırma enstitüleri ve laboratuvar projeleri
-
Güçlendirme öğrenimi ve fizik tabanlı yapay zeka araştırmaları
-
İnsan-robot etkileşimi ve işbirlikçi robot çalışmaları
-
Yapım alanları ve açık kaynak donanım ekipleri
-
Mühendislik eğitimi ve eğitim platformları
İnsan ölçeğinde boyutu ve uyumlu hareket kabiliyeti ile OpenArm, manipülasyon, uzaktan işletim, taklit öğrenimi, yardımcı robot teknolojileri ve daha fazlası için idealdir.
Ürün Versiyonları &ve Konfigürasyonlar
Versiyon 1 – DIY Donanım Kiti
-
Makine yapısını derinlemesine anlamak isteyen, güçlü pratik becerilere sahip kullanıcılar için.
-
Tüm mekanik, elektriksel ve 3D baskılı parçaları içerir; kılavuzu takip ederek kolu kendiniz monte edip kalibre edersiniz.
Versiyon 2 – Tamamlanmış Robotik Kol
-
Tak ve çalıştır platformuna ihtiyaç duyan araştırma enstitüleri, laboratuvarlar, şirketler ve eğitimciler için.
-
Gönderimden önce tamamen monte edilmiş, ayarlanmış ve kalibre edilmiştir; kutudan çıkar çıkmaz kullanıma hazır.
Mevcut kol konfigürasyonları (ilanlara bağlı olarak):
-
Kendin Yap Kiti – Tek Kol
-
Tamamlanmış Kol – Tek Kol
-
Kendin Yap Kiti – Çift Kol
-
Tamamlanmış Kollar – Çift Kol
-
Kendin Yap Kiti – Dört Kol
-
Tamamlanmış Kollar – Dört Kol
Paket İçeriği
Her OpenArm kiti veya tamamlanmış sistem genellikle şunları içerir:
-
Alüminyum alaşımlı ve paslanmaz çelik ana yapısal bileşenler
-
Motorlar, sürücü kartları, güç kaynağı ve kablolar
-
3D yazıcı ile üretilmiş parçalar ve vida setleri
İkili kol ve dörtlü kol versiyonları: bir resmi BOM uyumlu USB2CANFD-X2 cihazı (CEREBOTO yetkili yerli temsilcidir) PC'den CAN-FD iletişimi için.
Desteklenen Donanım Eklentileri
OpenArm, tam bir robotik sistem oluşturmanıza olanak tanıyan birden fazla donanım eklentisini (ayrı olarak satılmaktadır) destekler:
-
Hareketli robotik el – ince manipülasyon ve kavrama araştırmaları için.
-
Hareket yakalama eldiven seti – sezgisel teleoperasyon ve taklit öğrenimi için.
-
Mobil taban – OpenArm'ı mobil manipülatör platformuna dönüştürmek için.
SSS
S: Robot kol hemen kullanılabilir mi?
C: Tamamlanmış kol versiyonu fabrikada tamamen ayarlanmış ve kalibre edilmiştir—sadece açın ve çalışmaya başlayın. DIY donanım kiti, sistemi talimatlara göre monte etmenizi ve kurmanızı gerektirir.
S: OpenArm, ROS veya diğer ara yazılımlarla uyumlu mu?
C: Evet. OpenArm resmi olarak ROS çerçevesini desteklemektedir ve kolu Python ve C++ API'leri aracılığıyla da kontrol edebilirsiniz.
S: Bu ürün kimler içindir?
C: Üniversite ve enstitü araştırmacıları, AI &ve robotik laboratuvarları, öğretim kursları, mühendislik eğitim merkezleri ve ileri düzey hobi sahipleri.
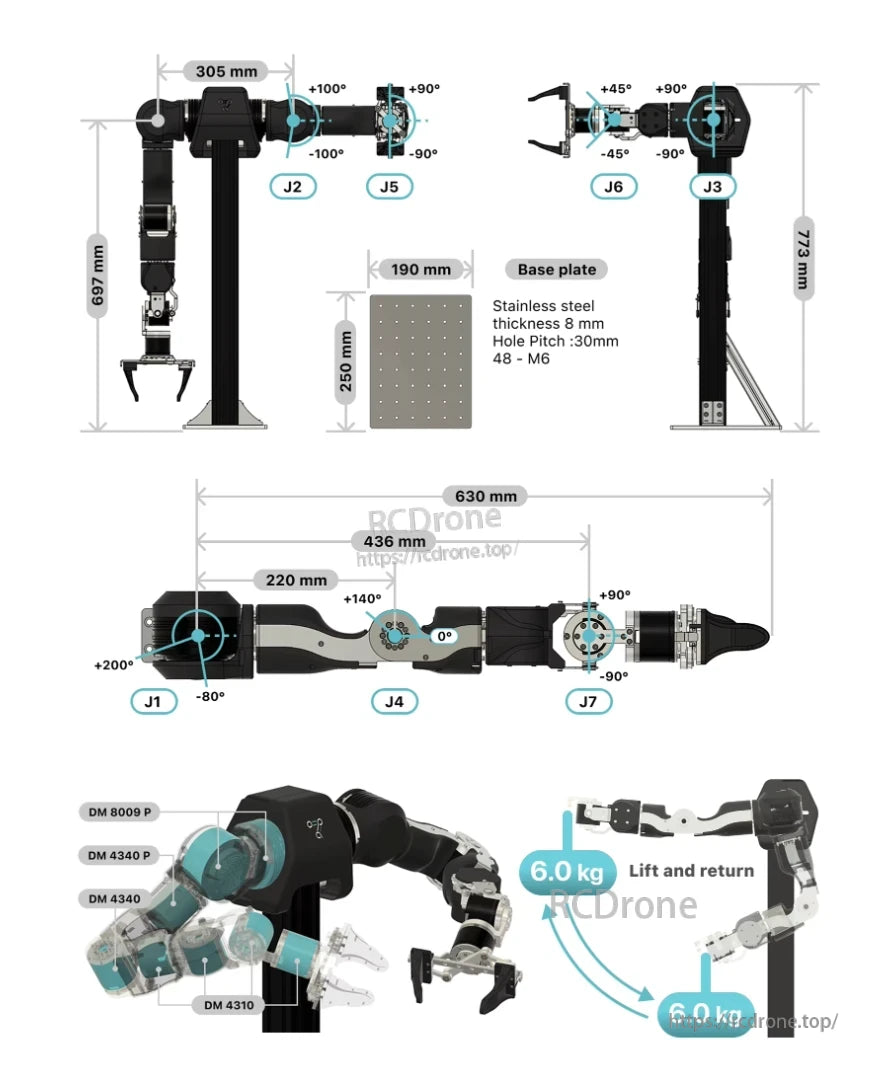
Cereboto OpenArm 7DOF Robot Kolu, tanımlı açısal aralıklara sahip yedi eklemdir (J1–J7). 697 mm veya 773 mm yüksekliğindedir, 630 mm'ye ulaşır ve 190×250 mm paslanmaz çelik taban plakasına monte edilir—8 mm kalınlığında ve 30 mm aralıklarla 48 M6 deliği vardır. DM8009P, DM4340P, DM4340 ve DM4310 motorları ile çalıştırılan bu kol, 6.0 kg yükleri hassasiyetle taşır. Endüstriyel ve araştırma kullanımı için tasarlanmış olup, yapısal sağlamlık ile hassas hareket kontrolünü dengeler.

Related Collections



