Uçuş Kontrol Cihazı Tipi
-

Uçuş Kontrolcü Setleri
FPV dronlar için GEPRC, iFlight, SpeedyBee, T-Motor ve Foxeer gibi önde gelen...
-
F4 Uçuş Denetleyicisi
F4 Uçuş Kontrolörü Koleksiyonu FPV yarışları, sabit kanatlı, VTOL ve çok rotorlu...
-
F7 Uçuş Denetleyicisi
F7 Uçuş Kontrolörü Koleksiyonu F4 tabanlı kartlara göre gelişmiş bilgi işlem gücü...
-

H7 Uçuş Kontrolörü
The H7 Uçuş Kontrolörü Koleksiyonu güçlü bir temel üzerine inşa edilmiş bir...
-

Betaflight Uçuş Kontrolcüleri
Betaflight Uçuş Kontrolcüsü, özellikle yarış ve serbest stil dronlar için tasarlanmış popüler,...
-
Inav Uçuş Kontrolörleri
Sabit kanatlı, çok rotorlu ve VTOL dronlar için hassas bir şekilde ayarlanmış...
-
Ardupilot uçuş denetleyicisi
Keşfedin ArduPilot Uçuş Kontrolörü Koleksiyonu, önde gelen markaların güçlü, açık kaynaklı uçuş...
-
PX4 Uçuş Denetleyicileri
The PX4 Uçuş Kontrolörü koleksiyon teklifleri İHA'lar, UAV'ler ve VTOL uçakları için...
-

SpeedyBee Uçuş Kontrolcüleri
SpeedyBee, hem yeni başlayanlar hem de deneyimli pilotlar için FPV dronlar için...
-

Matek Uçuş Denetleyicisi
The Matek Uçuş Kontrolörü koleksiyonu, yarış, FPV, sabit kanatlı ve çok rotorlu...
-

Kakute Uçuş Kontrolörü
The Kakute Uçuş Kontrolörü Holybro serisi, FPV dronlar, sabit kanatlı uçaklar ve...







Uçuş Kontrolörü Uygulamasına Göre
-
FPV uçuş denetleyicisi
FPV Uçuş Kontrolörü koleksiyonu, uygun maliyetli F4 kartlarından yüksek performanslı F7 ve...
-

Sabit kanat uçuş denetleyicisi
Birinci sınıf ürün yelpazemizi keşfedin Sabit Kanatlı Uçuş Kontrolörleri, sabit kanatlı İHA'lar,...
-

Tarım Drone Uçuş Kontrolcüsü
Tarım dronlarının beyni olarak görev yapan uçuş kontrolörü (FC), uçuş kontrolü, konumlandırma,...
-

Endüstriyel Uçuş Kontrolörü
Hassasiyet ve performansın kilidini bizimkiyle açın Endüstriyel Uçuş Kontrolörü üst düzey sistemleri...
-

VTOL Uçuş Denetleyicisi
The VTOL Uçuş Kontrolörü Dikey Kalkış ve İniş (VTOL) dronları için tasarlanmış,...




Uçuş Kontrol Cihazı Markası
-

JIYI Uçuş Kontrol Cihazı
JIYI, tarımsal ve endüstriyel dronlar için gelişmiş otomatik pilot sistemleri konusunda uzmanlaşmıştır....
-

Holybro Otopilot Uçuş Kontrolörü
Keşfedin Holybro Otopilot Uçuş Kontrolörü sabit kanatlı, VTOL, çok rotorlu ve otonom...
-
CUAV Otopilot Uçuş Denetleyicisi
CUAV Otopilot Uçuş Kontrolörleri PX4 ve ArduPilot sistemleriyle endüstriyel düzeyde performans ve...
-

Iflight Uçuş Denetleyicisi
iFlight Uçuş Kontrolörleri: FPV İHA'lar için Hassas Kontrol iFlight teklifleri yüksek performanslı...
-

GEPRC Uçuş Denetleyicisi
Keşfedin GEPRC Uçuş Kontrolörü koleksiyon—FPV dronları için yüksek performanslı AIO ve yığın...
-

Erkek uçuş denetleyicisi
Keşfedin BOYING Uçuş Kontrolörü hassas tarım dronları için tasarlanmış koleksiyon. otomatik uçuş...





-
SpeedyBee F405 V4 BLS 55A 30x30 FC&ESC Yığını
Normal fiyat Başlangıç fiyatı: $49.00 USDNormal fiyatBirim fiyat / -
SpeedyBee F405 Mini BLS 35A 20x20 Yığın
Normal fiyat Başlangıç fiyatı: $62.00 USDNormal fiyatBirim fiyat / -
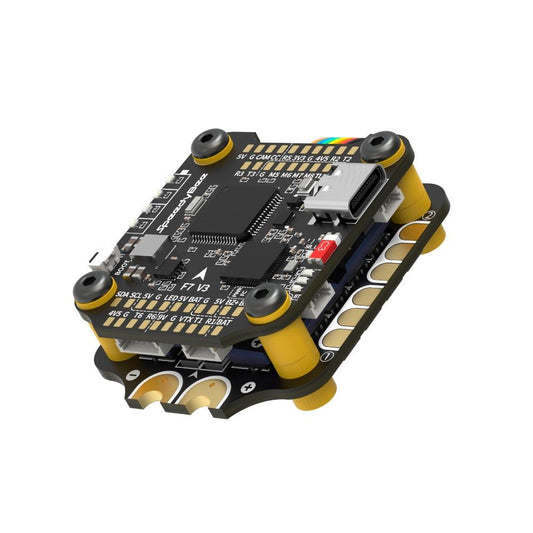
SpeedyBee F7 V3 Uçuş Kontrol Cihazı
Normal fiyat $63.00 USDNormal fiyatBirim fiyat / -
SpeedyBee F405 V5 OX32 55A 30x30 Model Uçak FC & 4'ü 1 arada ESC Seti, ICM42688 Jiroskop, STM32F405, Kablosuz Ayar & 16MB Blackbox
Normal fiyat Başlangıç fiyatı: $69.00 USDNormal fiyatBirim fiyat / -
Mateksys H743-SLIM V4 Uçuş Kontrolcüsü, STM32H743 Çift ICM42688P, DPS368, 2-8S, USB-C, OSD
Normal fiyat $129.00 USDNormal fiyatBirim fiyat /$0.00 USDİndirimli fiyat $129.00 USD -
SpeedyBee F405 AIO 40A Bluejay 25.5x25.5 3-6S Uçuş Kontrol Cihazı
Normal fiyat $110.60 USDNormal fiyatBirim fiyat / -
Foxeer F722 V4 Mini MPU6000 Uçuş Kontrol Cihazı
Normal fiyat $85.00 USDNormal fiyatBirim fiyat / -
Matek Mateksys Uçuş Kontrolcüsü - 2022 YENİ H743-WING V3 H743 Kanat FPV Yarış RC Drone Sabit Kanatlar için
Normal fiyat $156.18 USDNormal fiyatBirim fiyat / -
MATEK F405-WING-V2 Sabit Kanatlı Uçaklar için Uçuş Kontrolcüsü - STM32F405, ICM42688-P, OSD, 10 PWM
Normal fiyat $85.00 USDNormal fiyatBirim fiyat /$0.00 USDİndirimli fiyat $85.00 USD -
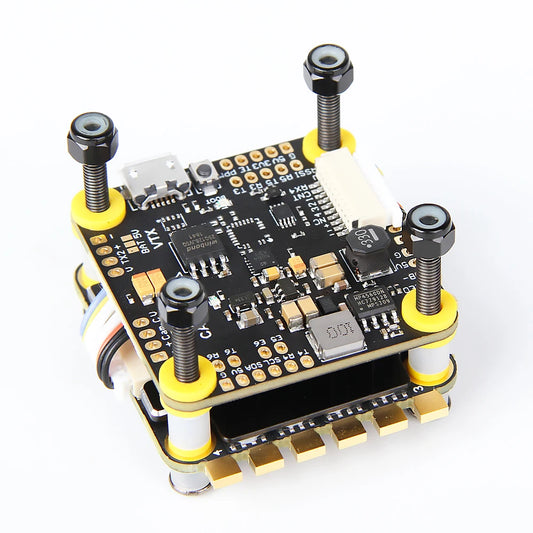
SpeedyBee F7 V3 BL32 50A 30x30 Stack Blackbox Veri Analizi iNAV Betaflight Emuflight Kablosuz Firmware Flaşör
Normal fiyat Başlangıç fiyatı: $65.40 USDNormal fiyatBirim fiyat / -
OSD'li Matek H743-SLIM Uçuş Kontrol Cihazı - 5V BEC MPU6000 Dahili OSD RC Yarış Drone Multirotor Multicopter için Akım Yok Sensörü
Normal fiyat $114.54 USDNormal fiyatBirim fiyat / -

AeroEggTech AET-H743-Basic H743 Uçuş Kontrolcüsü, ArduPilot Sabit Kanat/VTOL için, 10A BEC, Çift IMU
Normal fiyat Başlangıç fiyatı: $69.00 USDNormal fiyatBirim fiyat / -
Flywing ACE Helikopter Uçuş Kontrol FBL Gyro H1 Geliştirilmiş Versiyon, Dahili M10 GPS ve Koordineli Dönüş Özelliği ile
Normal fiyat $239.00 USDNormal fiyatBirim fiyat / -
SpeedyBee BT Nano 3 Kablosuz FC Yapılandırması
Normal fiyat $19.00 USDNormal fiyatBirim fiyat / -
MATEK H743-WLITE - Mateksys UÇUŞ KONTROL CİHAZI
Normal fiyat $139.39 USDNormal fiyatBirim fiyat / -
Flywing H2 Helikopter Uçuş Kontrol FBL Jirosu (H1 Geliştirilmiş Sürüm) Çift GPS, CAN Bus, 12S Voltaj Algılama ile
Normal fiyat $379.00 USDNormal fiyatBirim fiyat / -
Pixhawk PX4 PRO PIX 32 Bit Uçuş Kontrol Cihazı Otopilot - 4G SD RC Quadcopter ile Ardupilot ArduPlane ArduRover
Normal fiyat Başlangıç fiyatı: $130.31 USDNormal fiyatBirim fiyat / -
Hobbywing XRotor F7 FC + 65A 30x30mm 4'ü 1 arada ESC FPV Stack Combo, AM32, DJI Tak & Çalıştır
Normal fiyat Başlangıç fiyatı: $69.00 USDNormal fiyatBirim fiyat / -
RadioLink F405 Uçuş Kontrolcüsü – 32-bit STM32F405, 6 Kanal Çıkış, Dahili OSD, ArduPilot/Betaflight/INAV Uyumlu
Normal fiyat Başlangıç fiyatı: $39.00 USDNormal fiyatBirim fiyat / -
Foxeer F722 V4 Uçuş Kontrol Cihazı X8 DJI Tip-C
Normal fiyat $62.00 USDNormal fiyatBirim fiyat / -
Foxeer F722 V4 MPU6000 FC 8S Çift BEC Barometre X8 Uçuş Kontrol Cihazı
Normal fiyat $85.00 USDNormal fiyatBirim fiyat / -
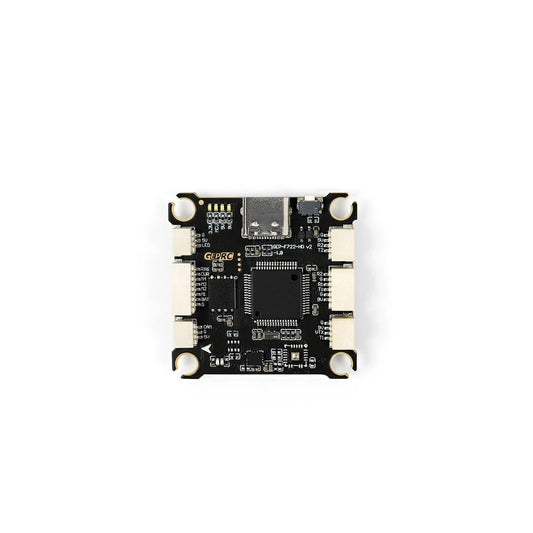
GEPRC GEP-F722-HD V2 Uçuş Kontrol Cihazı 3-6S LiPo 16M Kara Kutu ICM42688-P Sistemi RC FPV Yarış Drone Quadcopter Aksesuarları
Normal fiyat Başlangıç fiyatı: $53.00 USDNormal fiyatBirim fiyat / -
T-motor F7 HD Stack F7 HD Uçuş Kontrol Cihazı + F55A Pro II ESC FPV RC Drone Serbest Stil Yarış Quadcopter için
Normal fiyat Başlangıç fiyatı: $75.00 USDNormal fiyatBirim fiyat / -
CUAV X25 EVO Otopilot Uçuş Kontrolcüsü - STM32H7, Üçlü IMU, Çift Baro, RM3100, CAN, 16 PWM, PX4/ArduPilot
Normal fiyat Başlangıç fiyatı: $446.00 USDNormal fiyatBirim fiyat / -
GEPRC TAKER F745 BT 60A Uçuş Kontrolcü Seti – Çift Jiroskop, 512MB Blackbox, Bluetooth, 8 Motor Çıkışı
Normal fiyat $112.00 USDNormal fiyatBirim fiyat / -

Foxeer F405 V2 (Fiş) Uçuş Kontrol Cihazı + Reaper 55A ESC 8S Yığın Video Değiştirici Servo Borametre
Normal fiyat Başlangıç fiyatı: $65.00 USDNormal fiyatBirim fiyat / -
Pixhawk PX4 PIX 2.4.8 32 Bit Uçuş Kontrol Cihazı+RGB+OLED+Güvenlik Anahtarı+Buzzer+PPM+I2C+ 4G SD
Normal fiyat Başlangıç fiyatı: $132.28 USDNormal fiyatBirim fiyat / -
Pixhawk 2.4.8 PX4 PIX 32 Bit Uçuş Kontrol Cihazı - M8N GPS / Wifi Telemetri Modülü / Güvenlik Anahtarı Buzzer RGB I2C 4G SD OSD / OLED
Normal fiyat Başlangıç fiyatı: $10.96 USDNormal fiyatBirim fiyat / -
APM2.8 APM 2.8 uçuş kontrolörü Ardupilot + M8N GPS dahili pusula + gps standı + RC Quadcopter Multicopter için amortisör
Normal fiyat Başlangıç fiyatı: $104.90 USDNormal fiyatBirim fiyat / -
CUAV YENİ X7+ Uçuş Kontrol Cihazı NEO 3 Pro GPS Pixhawk Açık Kaynak PX4 ArduPilot GNSS FPV RC Drone VTOL Quadcopter Combo
Normal fiyat Başlangıç fiyatı: $407.11 USDNormal fiyatBirim fiyat / -
JIYI K++ Uçuş Kontrolü - Çift CPU isteğe bağlı engellerden kaçınma radarı Özel tarım drone'u
Normal fiyat Başlangıç fiyatı: $49.27 USDNormal fiyatBirim fiyat / -
Matek Sistemi H743 / MINI H743 Uçuş Kontrol Cihazı - STM32H743VIT6 ICM20602 FPV RC Yarış Drone Parçaları için Dahili OSD DPS310 PDB
Normal fiyat $116.02 USDNormal fiyatBirim fiyat / -
Yeni BaseCam Simplebgc 32 Bit Genişletilmiş Fırçasız Gimbal Denetleyici Sürüm 3.6, 5D2 5D3 BMCC Kamera için kodlayıcı ile
Normal fiyat $312.17 USDNormal fiyatBirim fiyat / -
GEPRC TAKER H743 BT 32Bit 65A Stack - STM32H743, Çift Jiroskop, Bluetooth Ayarı, 512M Siyah Kutu
Normal fiyat Başlangıç fiyatı: $94.00 USDNormal fiyatBirim fiyat / -
CUAV X25 EVO Pixhawk Otopilot Uçuş Kontrolcüsü – PX4 / ArduPilot Uyumlu, Yeni Nesil İHA Sistem Çekirdeği
Normal fiyat Başlangıç fiyatı: $446.00 USDNormal fiyatBirim fiyat / -
GEPRC TAKER F722 BLS 80A V2 Stack – STM32F722 Uçuş Kontrolcü + 80A 4'ü 1 arada ESC, 3–6S Yüksek Performanslı FPV Drone’lar için
Normal fiyat $155.00 USDNormal fiyatBirim fiyat /