Holybro Pixhawk 6X Otopilot H753 Uçuş Kontrol Modülü Standart Taban/Mini Taban PM02D M9N M10 GPS RC Çok Rotorlu Uçaklar
Holybro Pixhawk 6X Otopilot H753 Uçuş Kontrol Modülü Standart Taban/Mini Taban PM02D M9N M10 GPS RC Çok Rotorlu Uçaklar
HolyBro
Teslim alım stok durumu yüklenemedi
Holybro Pixhawk 6X Otopilot H753 Çok Rotorlu İHA'lar ve Uçaklar için Uçuş Kontrol Modülü
Holybro Pixhawk 6X Autopilot H753 Uçuş Kontrolcüsü, endüstriyel ve ticari çok rotorlu dronlar ve sabit kanatlı uçaklar için tasarlanmış gelişmiş bir modüler uçuş kontrolcüsüdür. Son teknoloji ve çeşitli yapılandırmalara sahip olan Pixhawk 6X, zorlu uygulamalar için eşsiz performans ve güvenilirlik sunar.
Temel Özellikler
1. Gelişmiş Yedeklilik ve BalancedGyro™ Teknolojisi
Pixhawk 6X, üç ICM-45686 IMU sensörü (±32g) ve iki barometre sensörüyle üçlü yedekliliği bünyesinde barındırır. Bu sensörler tamamen izole edilmiştir ve ayrı güç kontrolüne sahip ayrı veri yollarında çalışarak kritik görevlerde güvenilirlik sağlar. BalancedGyro™ teknolojisi, sensör doğruluğunu ve kararlılığını optimize eder.
2. Yüksek Performanslı İşlemci
480 MHz'e kadar saat hızına sahip STM32H753 işlemcisi tarafından desteklenen uçuş kontrolörü, olağanüstü hesaplama yetenekleri sunar. Sorunsuz görev yürütme için 2 MB flaş bellek ve 1 MB RAM içerir.
3. Modüler Tasarım
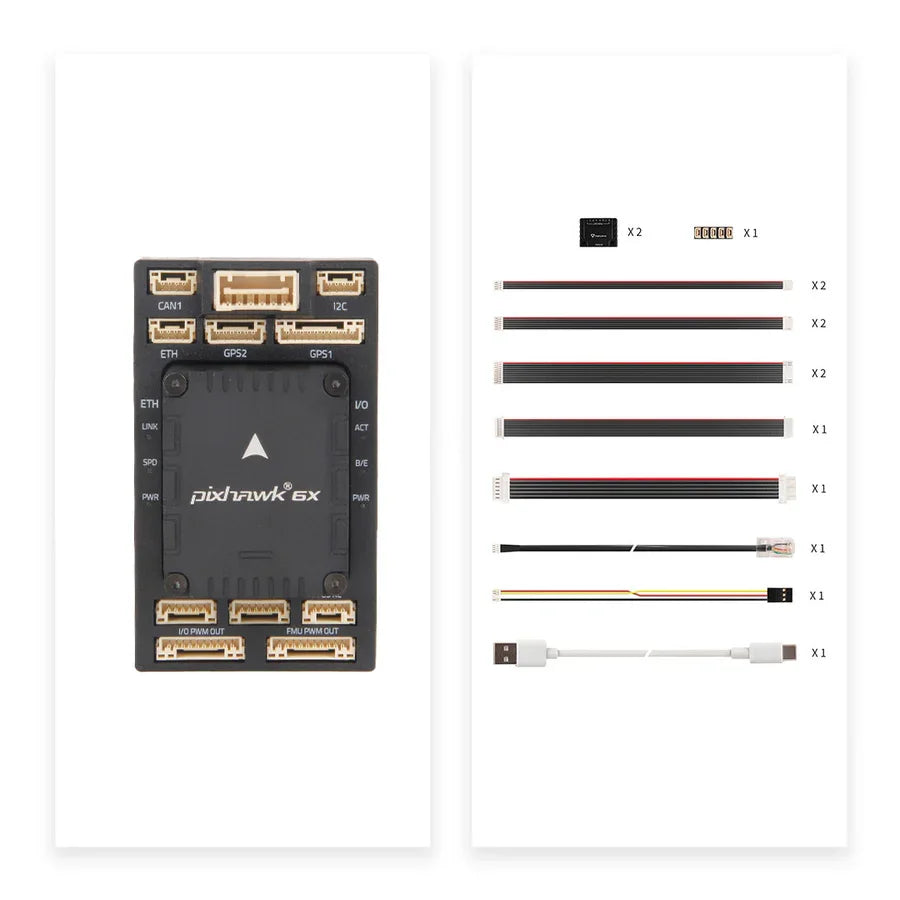
Pixhawk 6X, ayrılmış IMU, FMU ve Base sistemleriyle modüler bir tasarıma sahiptir. Bu bileşenler, 100 pinli ve 50 pinli Pixhawk® Autopilot Bus konnektörü aracılığıyla birbirine bağlanır ve esnek özelleştirme ve bakıma olanak tanır.
4. Yeni Titreşim Yalıtım Sistemi
Özel olarak formüle edilmiş dayanıklı titreşim izolasyon malzemesi kullanan Pixhawk 6X'in yenilikçi sönümleme sistemi, daha yüksek spektrumdaki rezonans frekanslarında optimum IMU performansı sağlayarak onu endüstriyel ve ticari uygulamalar için ideal hale getiriyor.
5. Ethernet Arayüzü
Ethernet arayüzü, yüksek hızlı görev bilgisayarı entegrasyonunu destekleyerek gelişmiş görev kontrolü için kesintisiz veri alışverişine olanak tanır.
6. Sıcaklık Kontrollü IMU Kartı
IMU kartı, zorlu ortamlarda bile tutarlı performans sağlayarak optimum sıcaklık aralığında çalışır.
7. Geniş Ürün Yazılımı Uyumluluğu
Rev 8 sürümü PX4 aygıt yazılımını (1.14.3 veya üzeri) ve Ardupilot aygıt yazılımını (4.5.0 veya üzeri) destekler. Kullanıcılar, özel gereksinimlerine uyacak şekilde aygıt yazılımını Mission Planner veya QGroundControl aracılığıyla flaş edebilirler.
Yapılandırmalar
Holybro Pixhawk 6X, farklı ihtiyaçları karşılamak için çeşitli konfigürasyonlarda mevcuttur:
-
Standart Süpürgelik: Boyutlar: 52,4 x 102 x 16,7 mm; Ağırlık: 72,5 g (Alüminyum)
-
Mini Süpürgelik: Boyutlar: 43,4 x 72,8 x 14,2 mm; Ağırlık: 26.5 gr
-
İsteğe bağlı GPS Modülleri: Hassas navigasyon için M9N, M10 GPS
-
Güç Modülleri: Güvenilir güç dağıtımı için PM02D
Özellikler
İşlemciler ve Sensörler:
-
FMU İşlemcisi: STM32H753 32 Bit Arm® Cortex®-M7, 480MHz, 2MB flaş bellek, 1MB RAM
-
G/Ç İşlemcisi: STM32F103 32 Bit Arm® Cortex®-M3, 72MHz, 64KB SRAM
-
IMU Sensörleri: 3x ICM-45686 BalancedGyro™ Teknolojisi ile
-
Barometreler: ICP20100 ve BMP388
-
Manyetometre: BMM150
-
Güvenli Öğe: NXP EdgeLock SE050 Tak ve Güven donanımı
Elektriksel Veriler:
-
Gerilim Değerleri:
-
Maksimum giriş voltajı: 6V
-
USB Güç Girişi: 4.75~5.25V
-
Servo Ray Girişi: 0~36V
-
-
Güncel Derecelendirmeler:
-
Telem1 çıkış akımı sınırlayıcı: 1.5A
-
Diğer tüm portların birleşik çıkış akımı sınırlayıcısı: 1.5A
-
-
PWM Sinyal Voltajı: Varsayılan 3.3V (Yerleşik direnç modifikasyonuyla 5V'a ayarlanabilir)
Mekanik Veriler:
-
Uçuş Kontrol Modülü Boyutları: 38,8 x 31,8 x 16,8 mm; Ağırlık: 31,3 g
-
Kaide Seçenekleri:
-
Standart Süpürgelik: 52,4 x 102 x 16,7 mm; Ağırlık: 72,5 g
-
Mini Süpürgelik: 43,4 x 72,8 x 14,2 mm; Ağırlık: 26,5 g
-
Uygulamalar
Holybro Pixhawk 6X şunlar için tasarlanmıştır:
-
Endüstriyel ve ticari çok rotorlu dronlar
-
Sabit kanatlı uçak navigasyonu
-
Yüksek hızlı veri entegrasyonuyla gelişmiş görev kontrolü
İster özel bir multirotor inşa ediyor olun, ister sabit kanatlı bir sistemi geliştiriyor olun, Holybro Pixhawk 6X Autopilot çok yönlü, sağlam ve güvenilir bir çözüm sunar. Modüler tasarımı, gelişmiş teknolojisi ve çoklu yapılandırma seçenekleri, her türlü profesyonel uygulamanın ihtiyaçlarını karşılamasını sağlar.
Related Collections