Uçuş Kontrol Cihazı Tipi
-

Uçuş Kontrolcü Setleri
FPV dronlar için GEPRC, iFlight, SpeedyBee, T-Motor ve Foxeer gibi önde gelen...
-
F4 Uçuş Denetleyicisi
F4 Uçuş Kontrolörü Koleksiyonu FPV yarışları, sabit kanatlı, VTOL ve çok rotorlu...
-
F7 Uçuş Denetleyicisi
F7 Uçuş Kontrolörü Koleksiyonu F4 tabanlı kartlara göre gelişmiş bilgi işlem gücü...
-

H7 Uçuş Kontrolörü
The H7 Uçuş Kontrolörü Koleksiyonu güçlü bir temel üzerine inşa edilmiş bir...
-

Betaflight Uçuş Kontrolcüleri
Betaflight Uçuş Kontrolcüsü, özellikle yarış ve serbest stil dronlar için tasarlanmış popüler,...
-
Inav Uçuş Kontrolörleri
Sabit kanatlı, çok rotorlu ve VTOL dronlar için hassas bir şekilde ayarlanmış...
-
Ardupilot uçuş denetleyicisi
Keşfedin ArduPilot Uçuş Kontrolörü Koleksiyonu, önde gelen markaların güçlü, açık kaynaklı uçuş...
-
PX4 Uçuş Denetleyicileri
The PX4 Uçuş Kontrolörü koleksiyon teklifleri İHA'lar, UAV'ler ve VTOL uçakları için...
-

SpeedyBee Uçuş Kontrolcüleri
SpeedyBee, hem yeni başlayanlar hem de deneyimli pilotlar için FPV dronlar için...
-

Matek Uçuş Denetleyicisi
The Matek Uçuş Kontrolörü koleksiyonu, yarış, FPV, sabit kanatlı ve çok rotorlu...
-

Kakute Uçuş Kontrolörü
The Kakute Uçuş Kontrolörü Holybro serisi, FPV dronlar, sabit kanatlı uçaklar ve...







Uçuş Kontrolörü Uygulamasına Göre
-
FPV uçuş denetleyicisi
FPV Uçuş Kontrolörü koleksiyonu, uygun maliyetli F4 kartlarından yüksek performanslı F7 ve...
-

Sabit kanat uçuş denetleyicisi
Birinci sınıf ürün yelpazemizi keşfedin Sabit Kanatlı Uçuş Kontrolörleri, sabit kanatlı İHA'lar,...
-

Tarım Drone Uçuş Kontrolcüsü
Tarım dronlarının beyni olarak görev yapan uçuş kontrolörü (FC), uçuş kontrolü, konumlandırma,...
-

Endüstriyel Uçuş Kontrolörü
Hassasiyet ve performansın kilidini bizimkiyle açın Endüstriyel Uçuş Kontrolörü üst düzey sistemleri...
-

VTOL Uçuş Denetleyicisi
The VTOL Uçuş Kontrolörü Dikey Kalkış ve İniş (VTOL) dronları için tasarlanmış,...




Uçuş Kontrol Cihazı Markası
-

JIYI Uçuş Kontrol Cihazı
JIYI, tarımsal ve endüstriyel dronlar için gelişmiş otomatik pilot sistemleri konusunda uzmanlaşmıştır....
-

Holybro Otopilot Uçuş Kontrolörü
Keşfedin Holybro Otopilot Uçuş Kontrolörü sabit kanatlı, VTOL, çok rotorlu ve otonom...
-
CUAV Otopilot Uçuş Denetleyicisi
CUAV Otopilot Uçuş Kontrolörleri PX4 ve ArduPilot sistemleriyle endüstriyel düzeyde performans ve...
-

Iflight Uçuş Denetleyicisi
iFlight Uçuş Kontrolörleri: FPV İHA'lar için Hassas Kontrol iFlight teklifleri yüksek performanslı...
-

GEPRC Uçuş Denetleyicisi
Keşfedin GEPRC Uçuş Kontrolörü koleksiyon—FPV dronları için yüksek performanslı AIO ve yığın...
-

Erkek uçuş denetleyicisi
Keşfedin BOYING Uçuş Kontrolörü hassas tarım dronları için tasarlanmış koleksiyon. otomatik uçuş...





-
GEPRC TAKER F722 BLS 80A V2 Stack – STM32F722 Uçuş Kontrolcü + 80A 4'ü 1 arada ESC, 3–6S Yüksek Performanslı FPV Drone’lar için
Normal fiyat $155.00 USDNormal fiyatBirim fiyat / -
JIYI K++ V2 Uçuş Kontrol Cihazı Combo - Tarım Drone'ları için Yeni Nesil Uçuş Kontrol Cihazı PMU GPS LED Combo
Normal fiyat $399.00 USDNormal fiyatBirim fiyat / -
GEPRC GEP-F411-35A AIO-(F411 FC 35A 2-6S 8bit BLS ESC 26.5mm/M2) DIY RC FPV Quadcopter Drone Yedek Aksesuarlar Parçaları
Normal fiyat $115.60 USDNormal fiyatBirim fiyat / -
Pixhawk PX4 PIX 2.4.8 32 Bit Uçuş Kontrol Cihazı - 4G SD Güvenlik Anahtarlı Otomatik Pilot Buzzer PPM I2C RC Quadcopter Ardupilot
Normal fiyat Başlangıç fiyatı: $130.64 USDNormal fiyatBirim fiyat / -
MATEK F405-WMN - Mateksys UÇUŞ KONTROL CİHAZI
Normal fiyat $93.60 USDNormal fiyatBirim fiyat / -
CUAV X7 Plus Uçuş Kontrol Cihazı - APM PX4 Pixhawk FPV Sabit kanatlı RC İHA Drone Quadcopter için Açık Kaynak
Normal fiyat Başlangıç fiyatı: $605.89 USDNormal fiyatBirim fiyat / -
Flywoo GOKU H743 PRO 55A 32Bit 128K 30x30 FC + ESC Yığını, 512MB Blackbox, Tak&PÇalıştır O4/O4 Pro
Normal fiyat $59.99 USDNormal fiyatBirim fiyat / -
MATEK H7A3-WING Uçuş Kontrolcüsü 3-6S, OSD, MicroSD, I2C Güç Monitörü ile Sabit Kanatlılar için
Normal fiyat $119.00 USDNormal fiyatBirim fiyat / -
T-Motor Velox Tam Fonksiyonlu FPV Stack: F7 SE Uçuş Kontrolcüsü + V50A SE 6S AM32 4'ü 1 Arada ESC
Normal fiyat Başlangıç fiyatı: $69.00 USDNormal fiyatBirim fiyat / -
Foxeer F722 Mini V4 Uçuş Kontrolcüsü ICM42688 STM32F722RET6 20x20mm 2-6S LiPo 5V/2.5A BEC Betaflight OSD
Normal fiyat $69.00 USDNormal fiyatBirim fiyat / -
RadioLink CrossFlight-CE Uçuş Kontrolörü – Multirotor, VTOL, Sabit Kanat ve Arabalar için Yüksek Dinamik Hassasiyetli Kontrol
Normal fiyat Başlangıç fiyatı: $259.00 USDNormal fiyatBirim fiyat / -
Radiolink F722 Uçuş Kontrolcüsü – 32-bit STM32F722RET6, 128MB Blackbox, 5 UART, HD/Analog VTX Desteği
Normal fiyat $45.00 USDNormal fiyatBirim fiyat / -
GEPRC TAKER F722 BLS 60A V2 Stack – STM32F722 Uçuş Kontrolcüsü + 60A 4'ü 1 arada ESC, 3–6S FPV Drone’lar için
Normal fiyat $107.00 USDNormal fiyatBirim fiyat / -
GEPRC TAKER F722 BLS 100A 8S Stack – 8S FPV Drone için F722 FC & 100A 4'ü 1 arada ESC, DJI Uyumlu, 12V/5V BEC
Normal fiyat $209.00 USDNormal fiyatBirim fiyat / -
GEPRC GEP-F722-45A AIO V2 Uçuş Kontrolcüsü – STM32F722, 2–6S, 45A BLHeli_S ESC, DJI Girişi, 25.5x25.5mm FPV Drone’lar için
Normal fiyat $149.00 USDNormal fiyatBirim fiyat / -
Iflight Borg F7 Mini Uçuş Kontrolörü Yarış FPV Dronları - 4–8s, 32MB Blackbox, VTX Switch, Betaflight & Inav uyumlu
Normal fiyat $49.00 USDNormal fiyatBirim fiyat / -
SKYSTARS F722FC - &AM32 55A 4IN1 ESC MINI 20×20mm Yığın 3-6S Baro Dahili OSD Tam Renkli LED Desteği DJI RC FPV Yarış Drone
Normal fiyat Başlangıç fiyatı: $69.13 USDNormal fiyatBirim fiyat / -
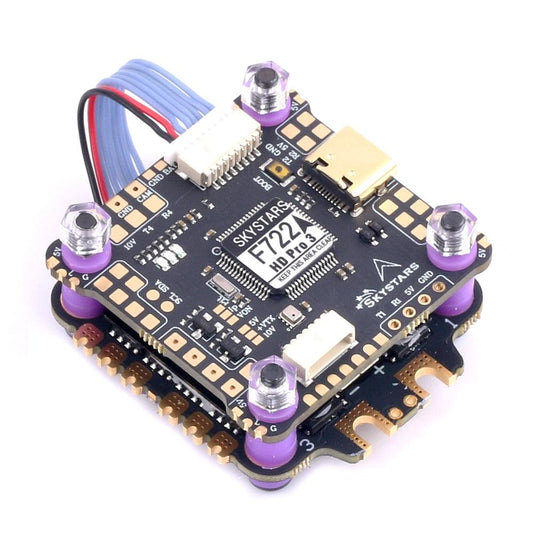
Skystars F7 F722HD PRO3 Uçuş Kontrol Yığını - OSD KO45/KO60 45A/60A 128K Blheli_32 3-6S ESC Yığını 30.5mm FPV Yarış Drone Quadcopt
Normal fiyat Başlangıç fiyatı: $69.14 USDNormal fiyatBirim fiyat / -
Tarım Drone için V9-Ag Otopilot Uçuş Kontrolörü
Normal fiyat Başlangıç fiyatı: $89.00 USDNormal fiyatBirim fiyat / -
JIYI KX Uçuş Kontrol Cihazı - RTK GPS, PMU, Rada, CAN-HUB ve Çoklu Çerçeve Uyumluluğuna Sahip Gelişmiş Endüstriyel Drone Kontrol Cihazı
Normal fiyat Başlangıç fiyatı: $39.00 USDNormal fiyatBirim fiyat / -
GEPRC GEP-TAKER G4 35A AIO G473 Ana Kontrol 170MHz 2 ~ 4S Verici Uçuş Kontrol Sistemi RC FPV Yarış Drone
Normal fiyat $92.00 USDNormal fiyatBirim fiyat / -
İHA Tarım Püskürtme Uçağı için JIYI K3A Pro Uçuş Kontrol Cihazı
Normal fiyat Başlangıç fiyatı: $19.00 USDNormal fiyatBirim fiyat / -
Hobbywing XRotor F7 Uçuş Kontrol Cihazı - FPV Yarış Drone Quadcopter için
Normal fiyat Başlangıç fiyatı: $66.82 USDNormal fiyatBirim fiyat / -
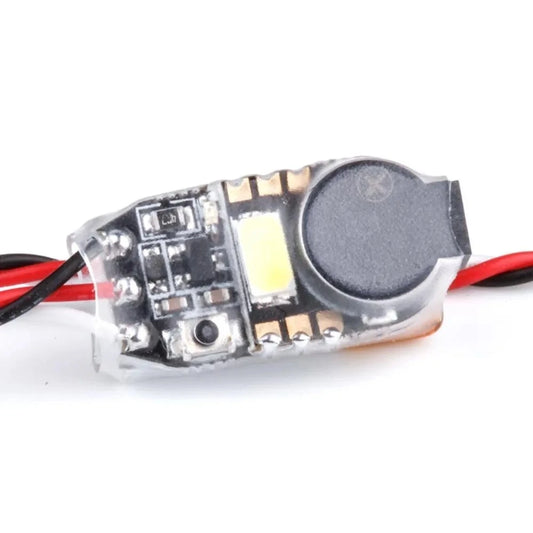
FLYWOO Finder V1.0 ve LED ZİL
Normal fiyat $9.46 USDNormal fiyatBirim fiyat / -
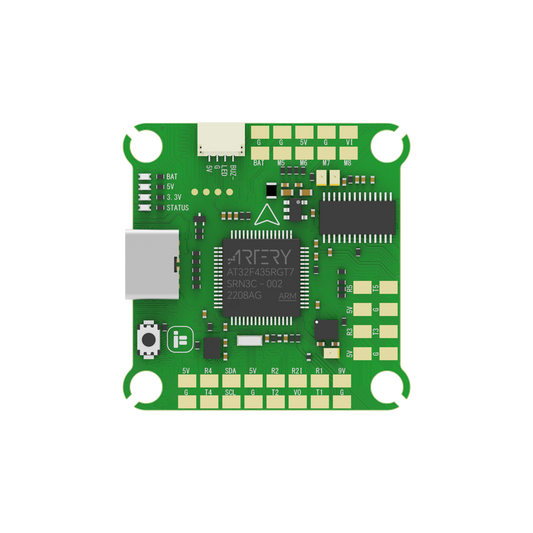
iFlight BLITZ ATF435 Uçuş Kontrol Cihazı
Normal fiyat $49.00 USDNormal fiyatBirim fiyat / -
SpeedyBee F745 35A BLS 25.5x25.5 AIO Uçuş Kontrol Cihazı
Normal fiyat $129.00 USDNormal fiyatBirim fiyat / -
Radiolink Pixhawk PIX 2.4.8 APM 32 Bit Uçuş Kontrol Cihazı - RC Drone Quadcopter/6-8 Eksen Multicopter için GPS M8N SE100 ile FC
Normal fiyat Başlangıç fiyatı: $209.94 USDNormal fiyatBirim fiyat / -
ESP32-S3 için Freenove Geliştirme Kiti (Arduino IDE ile uyumlu), Kamera Kablosuz Hoparlörler Nabız Sensörü Dokunmatik Ekran
Normal fiyat $55.13 USDNormal fiyatBirim fiyat / -
CUAV Yeni C-ADB İkincil Geliştirme Pixhawk Uçuş Kontrol Cihazı Hata Ayıklama Hata Ayıklama Adaptörü
Normal fiyat $179.17 USDNormal fiyatBirim fiyat / -
Radiolink Pixhawk PIX PX4 Uçuş Kontrol Cihazı - 32bit STM32F427 GPS Tutuculu M8N GPS Buzzer 4G SD Kart Telemetri Modülü Montajı
Normal fiyat Başlangıç fiyatı: $52.49 USDNormal fiyatBirim fiyat / -
iFlight Orijinal BaseCam SimpleBGC 32-bit Akım sensörü Dahili Çerçeve IMU Genişletilmiş Fırçasız Gimbal Denetleyici
Normal fiyat $264.08 USDNormal fiyatBirim fiyat / -
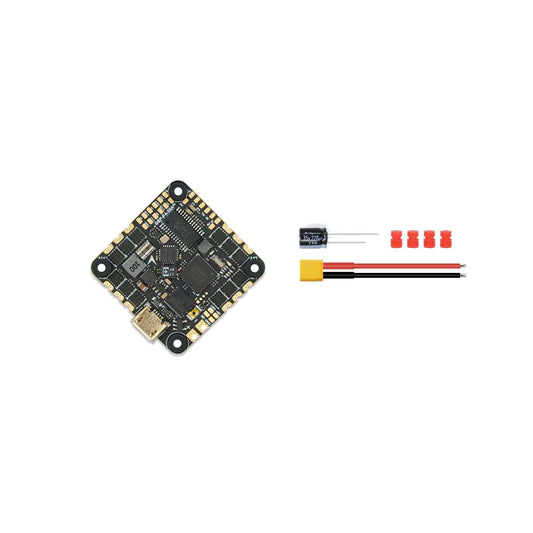
BETAFPV F4 2-3S 20A AIO Uçuş Kontrolcüsü V1, Seri ELRS 2.4G, 9V/5V BEC, DJI O3 6-Pin PMU
Normal fiyat $81.99 USDNormal fiyatBirim fiyat / -
BetaFPV Matrix 1S Fırçasız Uçuş Kontrolcüsü (5IN1) STM32G473, ELRS 2.4GHz, 5.8GHz 400mW VTX
Normal fiyat $74.99 USDNormal fiyatBirim fiyat / -
FLywoo GOKU F405 HD 1S 12A AIO FC/ESC, ELRS 2.4GHz TCXO, Çift BEC 5V/9V, O4/O4 Pro Tak-Çalıştır&Poynat
Normal fiyat $89.99 USDNormal fiyatBirim fiyat / -
Flywoo GOKU F722 Pro V2 30x30 FC Stack + 55A 4'ü 1 arada ESC (BL32/AM32) Tak-Çalıştır O4/O4 Pro
Normal fiyat $127.49 USDNormal fiyatBirim fiyat / -
Flywoo GOKU F405 SE 3-4S 20A AIO FC + 4'ü 1 arada ESC, DJI O4 / O4 Pro için Tak-Çalıştır
Normal fiyat $119.99 USDNormal fiyatBirim fiyat /