Pixhawk 2.4.8 PX4 PIX 32 Bit Uçuş Kontrol Cihazı TEKNİK ÖZELLİKLER
Kullanım: Araçlar ve Uzaktan Kumandalı Oyuncaklar
Parçaları/Aksesuarları Yükseltme: Çerçeve
Alet Sarf Malzemeleri: Taşlanmış
Teknik parametreler: Değer 3
Uzaktan Kumanda Çevre Birimleri/Cihazları: Uzaktan Kumanda
Tavsiye Edilen Yaş: 12+y,14+y
RC Parçaları ve Aksesuarları: Hız Kontrol Cihazları
Menşei: Anakara Çin
Model Numarası: Pixhawk 2.4.8
Malzeme: Metal
Dört Tekerlekten Çekiş Özellikleri: Motorlar
Araç Türü İçin: Uçaklar
Marka Adı: Readytosky
ReadyToSky, FPV RC modül aksesuarlarının profesyonel bir sağlayıcısıdır. Toptan veya toplu satın alma seçenekleri hakkında daha fazla bilgi edinmek istiyorsanız lütfen bizimle iletişime geçmekten çekinmeyin.
Özellikler:
Pixhawk 2.4.8, en son resmi ardupilot donanım yazılımını ve PX4 donanım yazılımını destekler.
1. Gelişmiş 32 bit ARM CortexM4 yüksek performanslı işlemciler (2MB flash), NuttX RTOS gerçek zamanlı işletim sistemini çalıştırabilir;
2. 14 PWM / servo çıkışı;
3. Veri yolu arayüzü (UART, I2C, SPI, CAN);
4. Entegre yedek güç ve yedek denetleyici arızalanır, birincil denetleyici yedekleme kontrolüne devredilir;
5. Otomatik ve manuel modlar sağlayın;
6. Yedek güç girişi ve yük devretme sağlayın;
7. Çok renkli LED ışıklar;
8. Çok tonlu zil Arayüzü sağlayın
9. Mikro SD uçuş verilerini kaydediyor;
Özellikler:
Arayüz
1.5 yüksek voltaj uyumlu UART 1, 2, donanım akış kontrolü ile
2. 2 CAN
3.Spektrum DSM / DSM2 / DSM-X uydu alıcısı uyumlu giriş
4.Futaba SBUS uyumlu giriş ve çıkışlar
5.PPM Sinyal Girişi
6.RSSI (PWM veya voltaj) Giriş
7.I2C
8.SPI
9.3.3 ve 6.6VADC girişi
10. Harici MİKRO USB Arayüzü
Pixhawk 2.4.8 için Pixhawk OSD OLED Ekran PIX PX4 Uçuş Kontrolü Uçuş Göstergesi Uçuş durumu I2C Arayüzüne Bağlı
Pixhawk vb. firmaların uçuş kontrolüne uygundur ve uçakların durum bilgilerini görüntülemek için kullanılır. Bu modül Pixhawk'ın I2C arayüzüne bağlanır
Not: Ekranın donanım yazılımını 3,5 veya üzeri bir sürüme yükseltmek için Massion Planner'da NTF_DISPLAY_TYPE'ı 1 olarak ayarlayın ve Pixhawk'ı yeniden başlatın.
PIXHAWK için WIFI Modülü NASIL kullanılır?
1.Nasıl bağlanılır?
pixhawk uçuş kumandasına 6P hat bağlantısı kullanın.
Farklı donanım yazılımı nedeniyle, bazı donanım yazılımı, iki bağlantı noktası kullanılabilir, bazı donanım yazılımı ise bağlantı noktalarından yalnızca birini kullanabilir. Bağlantı için mevcut bağlantı noktalarından birini bulun.
PX4 aygıt yazılımını kullanıyorsanız yalnızca TELEM1 kullanılabilir, TELEM2 kullanılamaz.
Ardupilot ürün yazılımı için TELEM2 bağlantı noktasının kullanılması önerilir. Veya bağlantı için mevcut bağlantı noktalarından birini bulun.
PX4 ürün yazılımı için TELEM1 bağlantı noktasını kullanmalıdır.
2.Nasıl kullanılır?
Lütfen unutmayın: Wifi Radyo Telemetri bağlantısını kullanırken, uçuş kontrolüne güç sağlamak için 3DR Güç Modülü veya 5V ESC kullanılmalıdır. USB önceliği Radyo Telemetrisinden daha yüksek olduğundan USB takılamıyor. USB kablosu takılıysa radyo telemetri iletimi için kullanılamaz.
Wifi erişim noktasının adı Drone'dur, bu nedenle bu erişim noktasına telefon veya bilgisayarla bağlanın, şifre 12345678'dir.
Not:Bazı cihazlar (Örneğin bazı iphone IOS sistemleri) otomatik olarak ip alamazlar, manuel ayarlamanız gerekir.
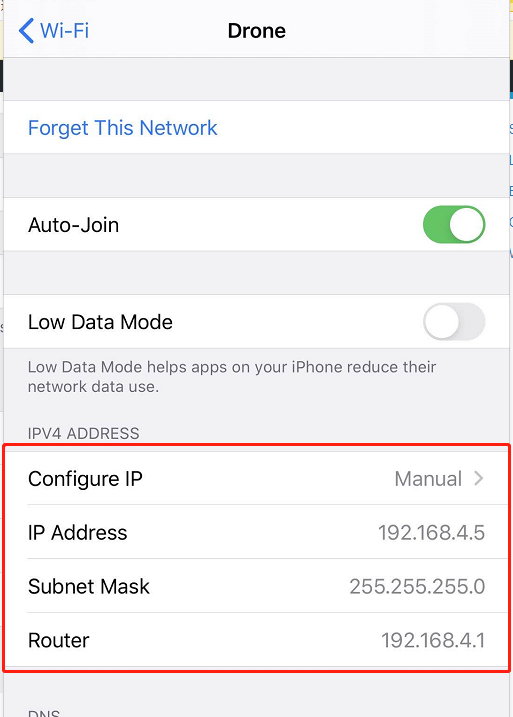
IP Yapılandırmasını Manuel olarak ayarlayın. IP adresini “192.168.4.5” veya diğer olarak ayarlayın, ancak “192.168.4.1″ olarak ayarlanamaz, son sayı 254'ü geçemez. Alt Ağ Maskesini “255.255.255.0” olarak ayarlayın (bu değeri ayarlamanız gerekir, başkası olamaz). Yönlendiriciyi “192.168.4.1” olarak ayarlayın(bu değer ayarlanmalıdır, diğer ayarlanamaz)
Cihazınız bu erişim noktasına başarılı bir şekilde bağlandığında, tarayıcıyı kullanarak http://192.168.4.1 adresini ziyaret edebilir, parametreyi değiştirebilirsiniz.
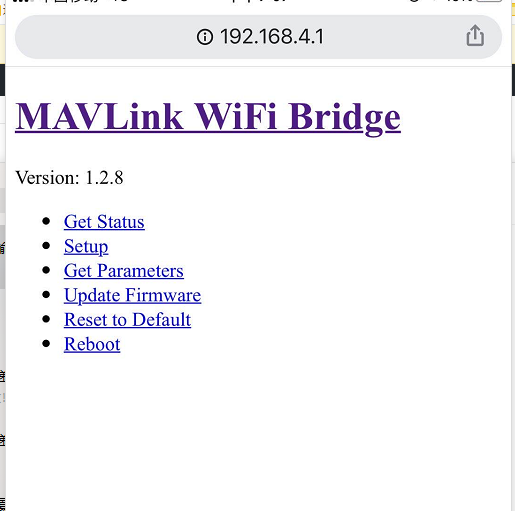
Düğmenin yeniden başlatma düğmesi değil, sıfırlama düğmesi olduğunu unutmayın; düğmeye bastığınızda, bazı parametreleri değiştirirseniz tüm parametreler varsayılana ayarlanacaktır.
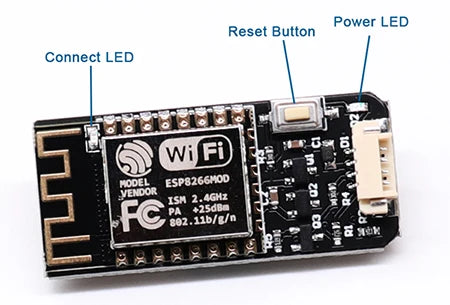
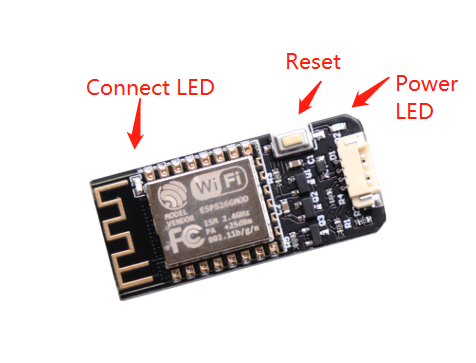
Güç LED'i: Güç açıldığında kırmızı LED yanar.
Bağlantı LED'i: yer kontrolüne (Örneğin, Mission Planner veya Qgroundcontrol) başarıyla bağlanıldığında, mavi LED yanıp söner. Zemin kontrolüyle bağlantı kesildiğinde mavi LED yanar.
1.Görev planlayıcı için nasıl kullanılır?
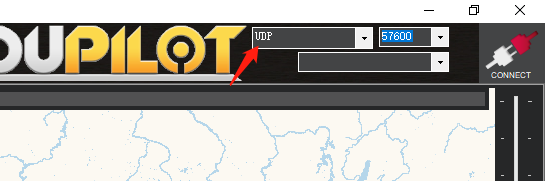
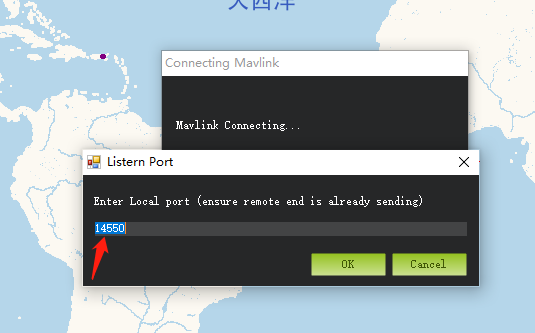
Öncelikle bilgisayarınızı etkin nokta Drone'a başarıyla bağlayın. UDP'yi seçin. Ardından "Bağlan" düğmesini tıklayın, 14550 bağlantı noktasını kullanın. “Tamam”a tıklayın. Baud hızını seçmenize gerek yoktur. Wifi modülünün varsayılan baud hızı 57600'dür. Ancak 115200 veya başka bir değer de çalışabilir.
2.Telefon için nasıl kullanılır
Android için: qgroundcontrol'ü indirin (yalnızca pixhawk için, APM için değil)
buradan,http://qgroundcontrol.com/downloads/
DroidPlanner'ı buradan indirin,https://github.com/DroidPlanner/Tower/releases
iPhone(IOS) için: Uygulama mağazasında qgroundcontrol'ü arayın.
qgroundcontrol (yalnızca pixhawk için, APM için değil) otomatik olarak bağlanabilir, DroidPlanner, groundcontrol'e bağlanmadan önce "UDP" ve "14550" bağlantı noktasını seçmelidir.
WIFI V3.0, 32 Bit CPU kullanır, TCP ve UDP'yi destekler
WIFI V3.0 DroneBridge web sitesi
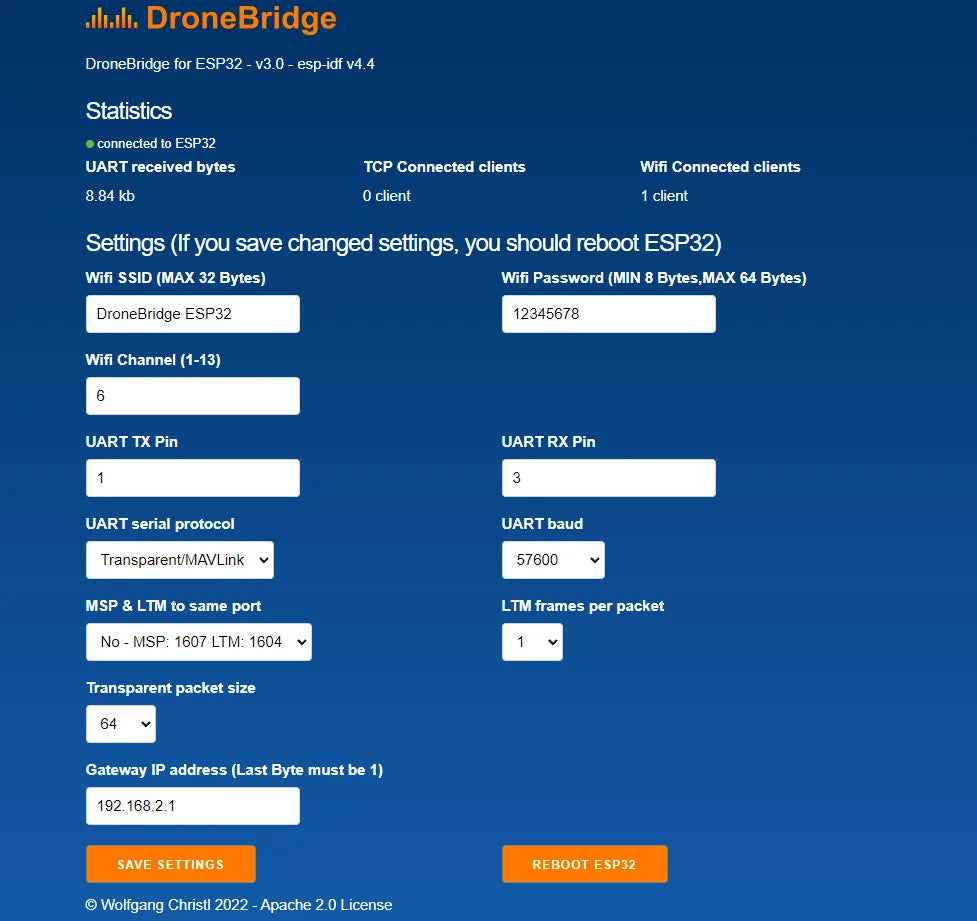
ulul; ESP32 v3.0 esp idf v4.4 için DroneBridge ESP'ye bağlı istatistik 32 UART alınan bayt TCP Bağlı istemciler Wifi Şifresi (MIN 8 Bayt, MAX 64 Bayt) değiştirilen ayarları kaydederseniz, ESP33'ü yeniden başlatmalısınız.
(seçiminiz olarak gönderin)

Pixhawk 2.4.8 FC + 4G TF Kart + MBN GPS GPS Tutucu+ OSD + Güç Modülü Amortisör I2C PPM RGB Güvenlik Düğmesi Buzzer Wifi Telemtry Kabloları Ontk 'GPs Modülü PPM 1'

Paket şunları içerir: Pixhawk 2.4.8 uçuş kumandası, 4G TF kartı, amortisör, I2C modülü, PPM modülü, RGB modülü, OLED ekran, sesli uyarılı güvenlik düğmesi ve tüm bileşenler için kablolar.
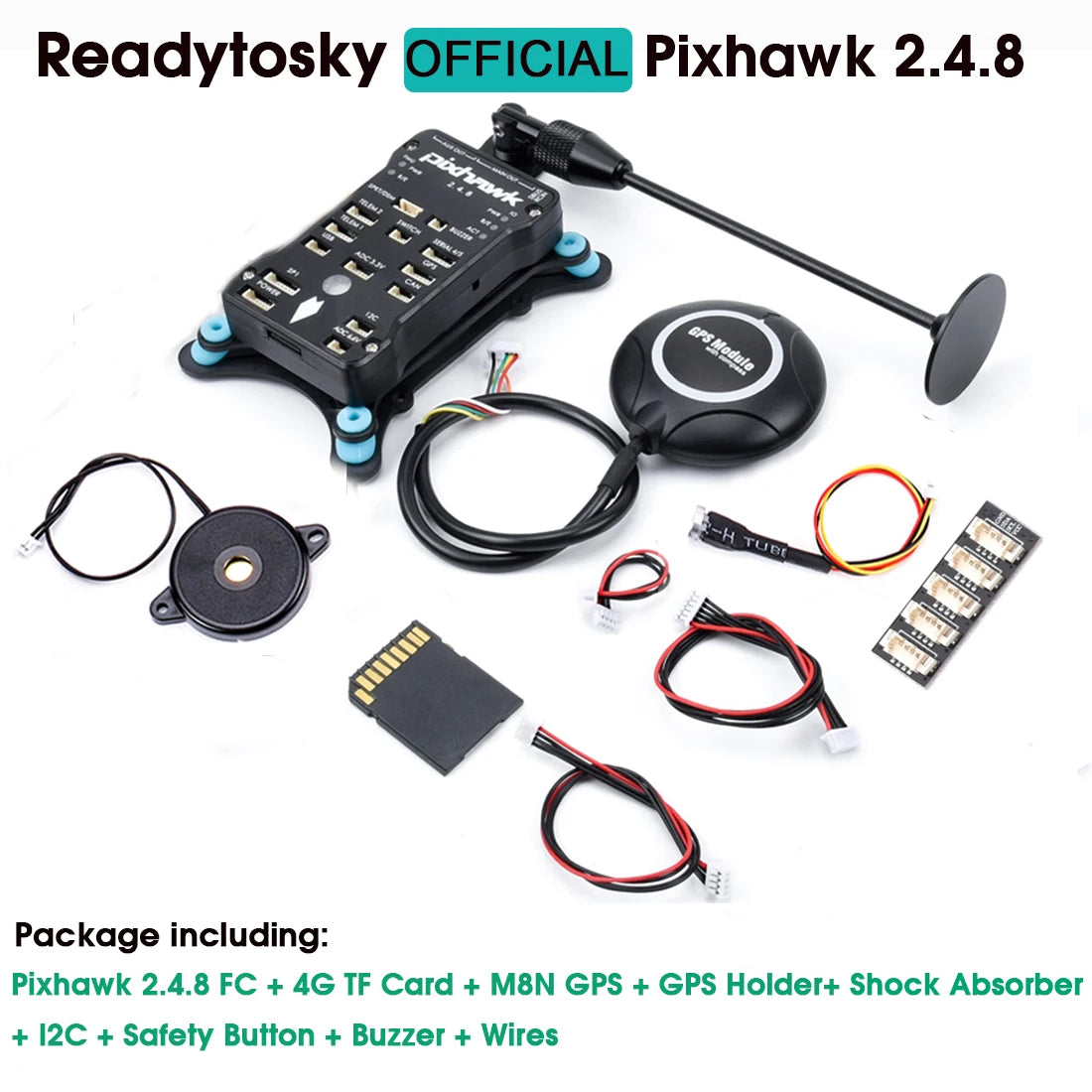
Paket şunları içerir: Pixhawk 2.4. 8 uçuş kumandası, bir 4G TF kartı, MBN GPS modülü, GPS tutucusu, amortisör, I2C güvenlik düğmesi, zil kabloları ve kablosuz veri iletimi için isteğe bağlı bir telemetri modülü.

Paket şunları içerir: Pixhawk 2.4.8 uçuş kumandası, 4G TF kartı, amortisör, OLED ekran, I²C modülü, PPM (darbe konum modülasyonu) modülü, sesli uyarılı güvenlik düğmesi ve kablolar.

Bu Pixhawk 2.4.8 uçuşu denetleyici bir 4G TF kartı, güvenlik düğmesi, sesli uyarı ve yardımcı çıkışlar için kablolarla birlikte gelir. Aynı zamanda iki güç girişi, bir seri bağlantı noktası ve ADC (analogdan dijitale dönüştürücü) kanallarına sahip bir TELEM modülüne sahiptir. Ek olarak GPS yetenekleri vardır ve çalışması için güç gerektirir.

11,32V pil voltajıyla 'Stabilize' Modunda VCC, GPS ve SD kart kalibrasyonu gerekir. Ayrıca GPS verisi de mevcut değil. Ön-kurma yapıldı ve EKF (Genişletilmiş Kalman Filtresi) etkinleştirildi.