




DFRobot SEN0142 MPU6050 6 EKSEN Jiroskop İvmeölçer IMU Modülü, Arduino için I2C Dijital Hareket İşlemcili & Robotik
DFRobot SEN0142 MPU6050 6 EKSEN Jiroskop İvmeölçer IMU Modülü, Arduino için I2C Dijital Hareket İşlemcili & Robotik
DFRobot
Teslim alım stok durumu yüklenemedi
Genel Bakış
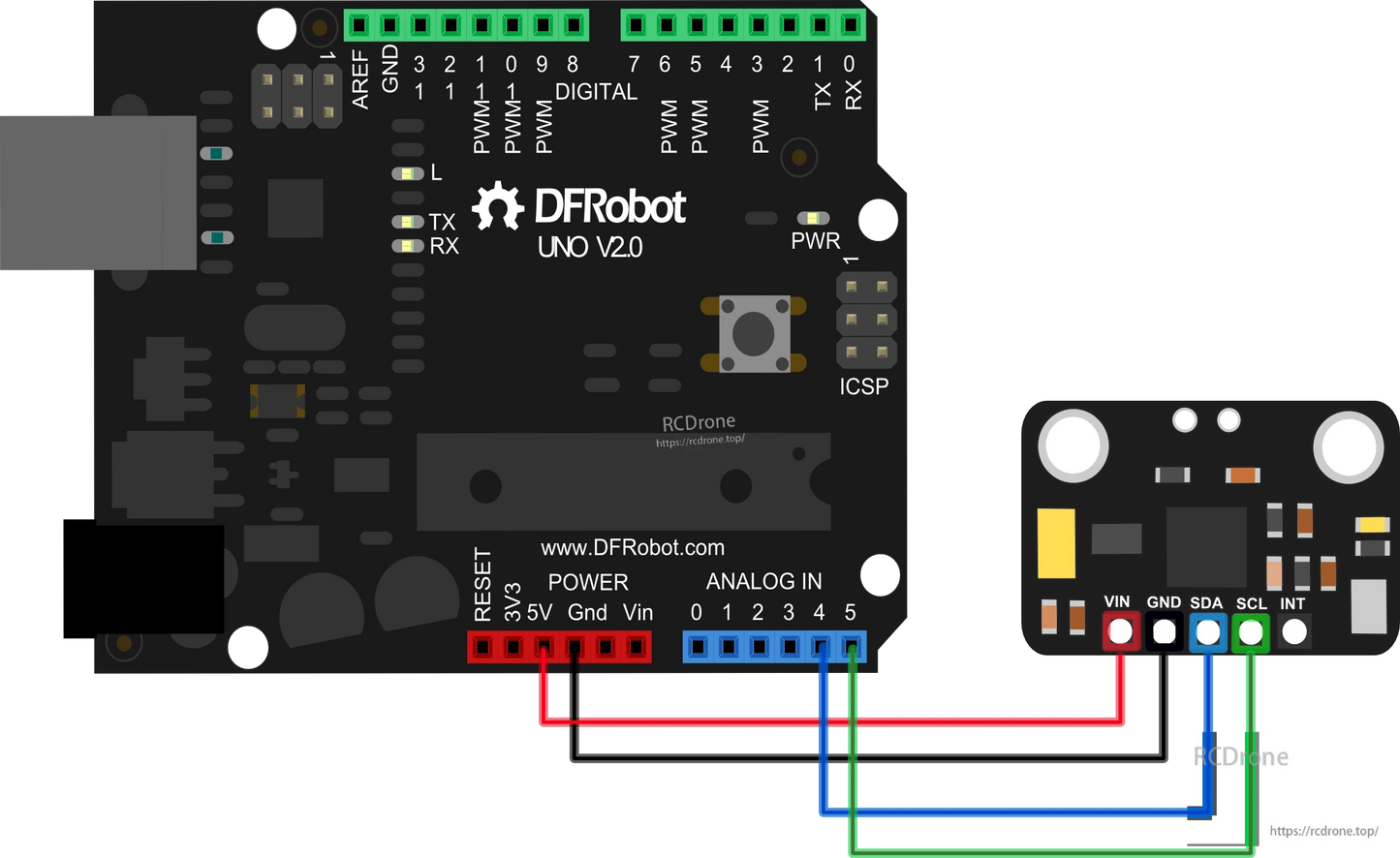
DFRobot SEN0142 MPU6050 6 DOF IMU modülü, tek bir çip üzerinde 3 eksenli jiroskop ve 3 eksenli ivmeölçer entegre ederek, robotik, drone, giyilebilir cihazlar ve Arduino projeleri için hassas hareket algılama sunar. Gelişmiş Dijital Hareket İşlemcisi (DMP) ile donatılmıştır ve 6 eksenli ve 9 eksenli MotionFusion algoritmalarını destekleyerek, quaternion, Euler açısı ve ham sensör verisi çıktısı sağlar. Geniş bir giriş voltaj aralığı olan 3V–5V ile MPU6050, gerçek zamanlı hareket takibi ve jest algılama için doğrudan Arduino ve diğer mikrodenetleyicilere bağlanabilir.
Temel Özellikler
-
Tek bir çipte 3 eksenli jiroskop ve 3 eksenli ivmeölçer birleştirir
-
Programlanabilir ivmeölçer aralığı: ±2g, ±4g, ±8g, ±16g
-
Jiroskop hassasiyeti: ±250, ±500, ±1000, ±2000 dps
-
Dijital Hareket İşlemcisi (DMP) yerleşik MotionFusion ve jest tanıma için
-
I2C dijital arayüz matris, quaternion, Euler ve ham veri formatlarını destekler
-
Gömülü bias & pusula kalibrasyonu ile doğruluğun artırılması
-
Arduino ve giyilebilir elektroniklerle uyumlu I2Cdevlib aracılığıyla
Teknik Özellikler
-
Çalışma Voltajı: 3–5 V
Çıktı: I2C dijital (6/9 eksenli MotionFusion verisi)
-
İvmeölçer: ±2g / ±4g / ±8g / ±16g programlanabilir aralık
-
Jiroskop: ±250 / ±500 / ±1000 / ±2000 dps hassasiyeti
-
Veri Formatı: Dönüşüm matris, quaternion, Euler açısı, ham veri
-
Boyutlar: 14 × 21 mm
Uygulamalar
-
Robotik hareket algılama
-
Arduino &ve DIY elektronik projeleri
-
İnsan-Bilgisayar Etkileşimi (HCI)
-
Giyilebilir cihazlar ve jest kontrolü
-
Navigasyon ve dengeleme sistemleri (e.g., Segway tipi taşıyıcılar)
-
Drone dengeleme ve hareket izleme
Detaylar



Örnek Kod
Lütfen önce tüm IMU sensörleri için kütüphaneleri indirin!




- Bir seçim yapmanız sayfanın tamamının yenilenmesine neden olur.
- Yeni bir pencerede açılır.