F450-4B Raspberry Pi Programlanabilir Drone Geliştirme Kiti - Pixhawk DIY Ardupilot Endüstriyel Açık Kaynak Drone Platformları
F450-4B Raspberry Pi Programlanabilir Drone Geliştirme Kiti - Pixhawk DIY Ardupilot Endüstriyel Açık Kaynak Drone Platformları
RCDrone
Teslim alım stok durumu yüklenemedi
Genel bakış
The F450-4B Raspberry Pi İHA gelişmiş bir Kendin Yap İHA Seti güçlü bir şekilde birleştiren Ahududu Pi 4B çok yönlü yerleşik bilgisayar Pixhawk 2.4.8 uçuş kontrolörü, onu son derece özelleştirilebilir hale getirir ve programlanabilir drone platform. Bu Açık Kaynaklı İHA Platformu gibi son teknoloji araçları destekler Dronekit-pythonGeliştiricilerin otonom görevler, gerçek zamanlı veri iletimi ve AI destekli görüntü işleme uygulamaları oluşturmasını sağlayan sağlam 450 mm çerçeve, 200 MP HD kamera, 20 dakikaya kadar uçuş için 3S 5200 mAh pil ve irtifa tutma, eve dönüş ve daire modu gibi gelişmiş uçuş modlarıyla F450 Drone Kiti, yenilikçi bir drone geliştirme deneyimi arayan meraklılar, araştırmacılar ve eğitimciler için ideal bir seçimdir.
Temel Özellikler
Yüksek Performanslı Donanım
- Ahududu Pi 4B: 64-bit 1.5GHz dört çekirdekli işlemciyle güçlendirilmiştir, güvenilir çalışma için 4K video çıkışı ve yüksek hızlı WiFi iletişimini destekler.
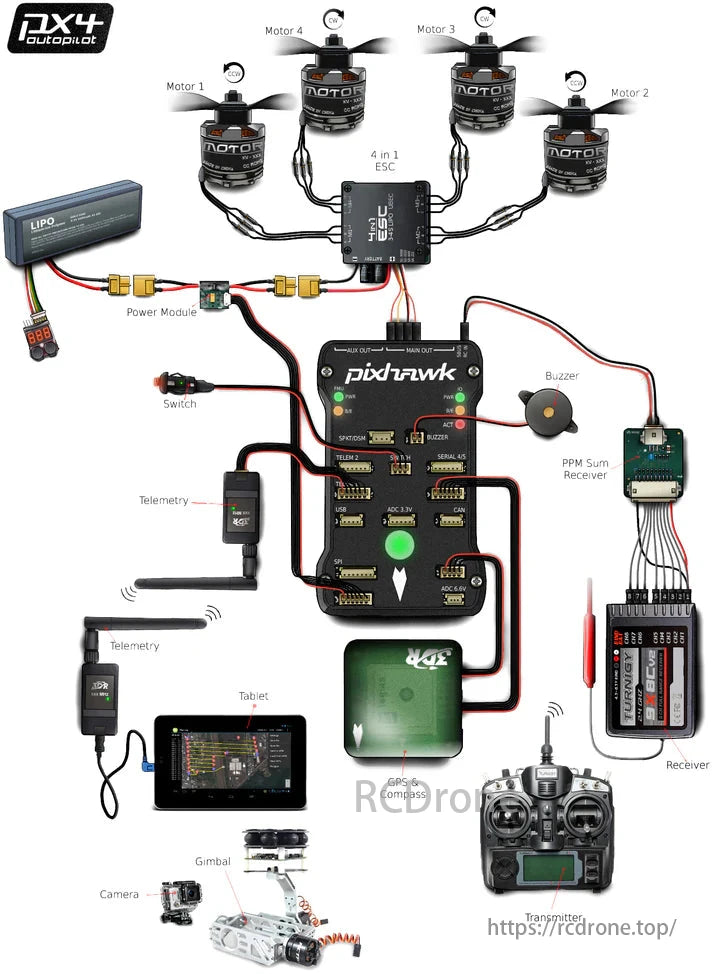
- Pixhawk 2.4.8 Uçuş Kontrolörü:Birden fazla entegre sensörle donatılmış olup, hassas tutum kontrolü, havada asılı kalma ve görev planlaması sağlar.
- Vizyon Genişletme Desteği:Monoküler kamera ve OpenCV araçlarıyla eşleştirilen bu kit, gerçek zamanlı görüntü iletimi ve işleme ihtiyaçlarını karşılar.
Çeşitli Uçuş Modları
- Yükseklik Tutma (AltHold): Uçuş irtifasını sabit tutar.
- Gezinme: Hassas sabit gezinme sağlar.
- Ana Sayfaya Dönüş (Return): Sinyal kaybı veya pil düşüklüğü durumunda otomatik olarak başlangıç noktasına döner.
- İniş (Kara): Pürüzsüz otonom iniş gerçekleştirir.
- Stabilizasyon Modu: Uçuş tutumunu otomatik olarak ayarlar.
- Daire Modu: Hedef etrafında dairesel uçuşlar gerçekleştirir.
- Başsız Mod: Daha kolay kontrol için yön kısıtlamalarını ortadan kaldırır.
- Kontrol Dışı Dönüş: Sinyal kaybolduğunda önceden ayarlanmış bir konuma geri döner.
- Düşük Güç İnişi: Düşük pil koşullarında güvenli iniş sağlar.
Veri İletimi ve Görüntü İşleme
- Harici yönlendiricilere ihtiyaç duymadan, dahili bir erişim noktası üzerinden yerel bir WiFi ağı kurarak, gerçek zamanlı veri ve görüntü aktarımı sağlar.
- Görüntü izleme ve akıllı uygulamalar için ideal olan OpenCV tabanlı video akışı ve analizini destekler.
Özellikler
İHA Parametreleri
| Parametre | Detaylar |
|---|---|
| İsim | F450 İHA Kiti |
| Dingil açıklığı | 450mm |
| Ağırlık | 1493g (pil ve Raspberry Pi 4B ile) |
| Uçuş Kontrolörü | Pixhawk 2.4.8 açık kaynaklı uçuş kontrolörü |
| Gemideki Bilgisayar | Ahududu Pi 4B |
| Kamera | 200MP Yüksek Çözünürlük 1080P |
| Gezinme Desteği | Optik akış modülü ve lazer mesafe sensörü |
| GPS Modülü | m8n GPS |
| Uçuş Süresi | ~20 dakika (ortama ve göreve bağlı olarak) |
| Pil | 3S 5200mAh (11,1V) |
| Yük Kapasitesi | 500 gr |
| Rüzgar Direnci | Seviye 3-4 |
| Motor | GüneşliGökyüzü A2212 |
| ESC | Hobbywing 20A ESC (3S-4S LiPo pilleri destekler) |
| Pervaneler | T1045 kendi kendini kilitleyen pervaneler |
| Maksimum Yükseklik | 2000m (parazitsiz) |
| Uçuş Menzili | 1000m |
| Uçuş Senaryoları | İç mekan / Dış mekan |
Pixhawk 2.4.8 Uçuş Kontrol Cihazı Özellikleri
- İşlemci: 32-bit ARM STM32F427 Cortex M4, 168MHz, 256KB RAM
- Sensörler:
- L3GD20 3 eksenli 6DOF jiroskop
- LSM303D 3 eksenli 14 bit ivmeölçer/manyetometre
- MPU6000 6 eksenli ivmeölçer/manyetometre
- MS5611 yüksek hassasiyetli barometre
- Zemin Kontrol Uyumluluğu: QGroundControl, GörevPlanlayıcısı
- Boyutlar: 81mm x 47mm x 16mm; Ağırlık: 37g
Raspberry Pi 4B Özellikleri
- Yonga seti: Broadcom BCM2711
- İşlemci: 64-bit 1.5GHz dört çekirdekli
- Grafik işlemcisi: 500MHz VideoCore VI
- Veri deposu: 4GB DDR4
- Arayüzler: 2 adet USB 3.0, 2 adet USB 2.0
- Video Çıkışı: Çift mikro HDMI bağlantı noktası, destekler 4K@60Hz
- İletişim: Bluetooth 5.0, WiFi 5 (2,4/5 GHz)
- Güç Kaynağı: USB Tip-C (5V 3A)
Paket İçeriği
Yapılandırma 1: FlySky i6 Uzaktan Kumanda ve Telemetri ile SunnySky A2212 Motor
- İniş takımlı F450 şasisi
- SunnySky A2212 motorlar (4 adet)
- Hobbywing 20A ESC'ler (4 adet)
- T1045 kendinden kilitli pervaneler (4 çift)
- PIX M8n GPS modülü
- Titreşim sönümleyici plaka
- FlySky i6 uzaktan kumanda
- 3S 5200mAh pil
- B3 denge şarj cihazı
- GPS montajı
- FS voltaj telemetri modülü

Dahil: Pil kayışları, naylon kablo bağları, ahşap pedler, 3M yapışkan bant, zil, montaj araçları
Montaj ve hata ayıklama videoları ve ilgili materyaller sağlanacaktır; kaynak kodu için müşteri hizmetleriyle iletişime geçin.
Yapılandırma 2: SunnySky A2212 Motoru Radiolink PRO ile
- İniş takımlı F450 şasisi
- SunnySky A2212 motorlar (4 adet)
- Hobbywing 20A ESC'ler (4 adet)
- 9450 kendinden kilitli pervaneler (3 çift)
- RESİMLER.M8n GPS modül kiti
- Titreşim sönümleyici plaka
- Radyolink PRO (R9DS alıcısı)
- 3S 2200mAh kontrol pili
- 3S 5200mAh pil
- B3 denge şarj cihazı
- GPS montajı

Dahil: Pil kayışları, naylon kablo bağları, ahşap pedler, 3M yapışkan bant, zil, montaj araçları
Montaj ve hata ayıklama videoları ve ilgili materyaller sağlanacaktır; kaynak kodu için müşteri hizmetleriyle iletişime geçin.
F450 İHA Kiti Montajı
Uygulama Senaryoları
F450-4B Drone Geliştirme Kiti şunlar için idealdir:
- İHA Ar-Ge: Üniversite araştırmaları, uçuş kontrolörü testleri, algoritma geliştirme.
- Akıllı Uygulamalar: Yol planlama, hedef tanıma ve engel kaçınma.
- Eğitimsel Deneyler: Programlama, donanım montajı ve hata ayıklama.
- Saha Kullanımı: İç mekanda gezinme, dış mekanda ölçme, tarımsal izleme ve daha fazlası.
Detaylar
F450-4B Raspberry Pi Drone Geliştirme Platformu
F450, basit ve kolay montaj, yüksek maliyet performansı, güçlü pratiklik ve yeni başlayanların drone operasyonlarına hızlı bir şekilde başlamasına olanak tanıyan uygunluğuyla klasik ve yaygın olarak kullanılan bir drone modelidir.

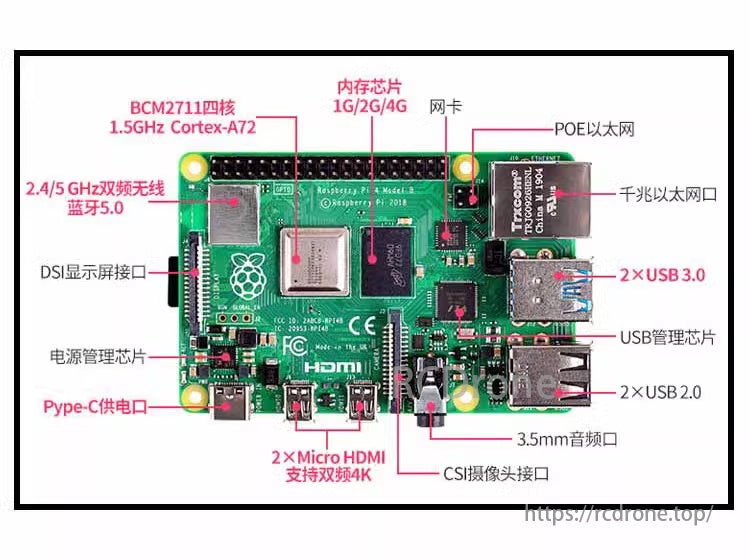
Yükseltilmiş Raspberry Pi 4B
Raspberry Pi 4B donanım işlem gücü, 3B+'dan önemli ölçüde daha güçlüdür.
Raspberry Pi en son açık kaynaklı sistemle donatılmıştır Ubuntu 20.04Ubuntu Mate sistemine kıyasla daha akıcı bir deneyim sunuyor.

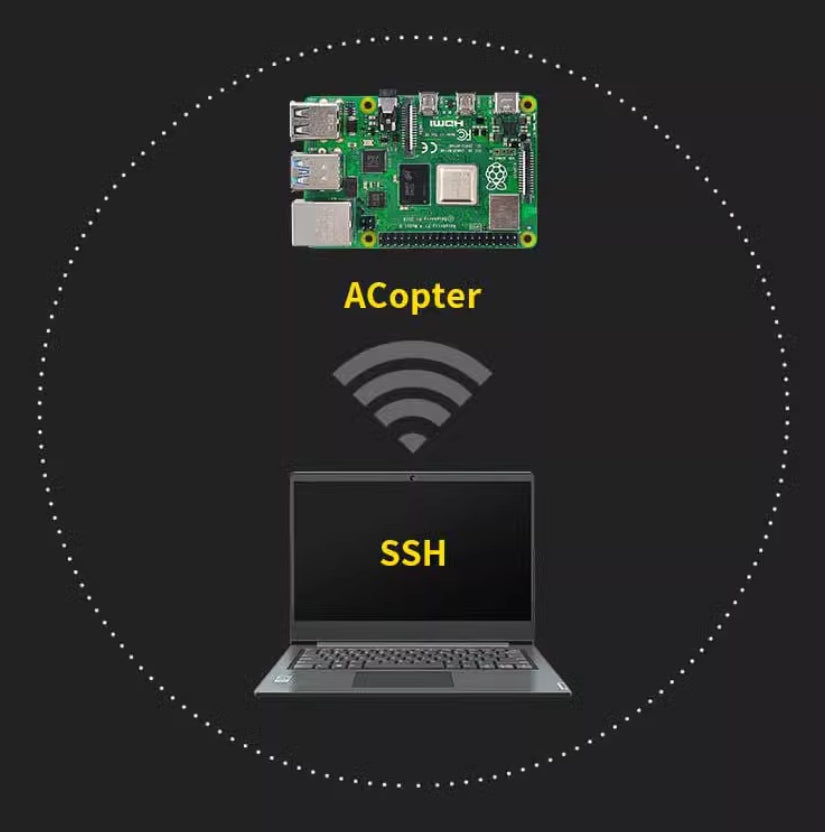
Sistem Etkinleştirilmiş WiFi Erişim Noktası (Acopter)
Raspberry Pi 4B'nin WiFi yeteneği kullanılarak kendi kendine oluşturulmuş bir erişim noktası (Acopter) oluşturulur. Bilgisayar, yerel bir ağ oluşturmak ve Raspberry Pi'ye uzaktan erişim için SSH komutlarını kullanmak üzere doğrudan 4B'nin WiFi erişim noktasına bağlanabilir. Ağ yapılandırması için bir yönlendirici gerektiren 3B+ modelinin aksine, bu kurulum yeni başlayanlar için çok daha basit ve kullanıcı dostudur.
OpenCV Görsel İşleme
Görüntü iletimi ve son işlemeyi sağlayan bir monoküler kamera eklendi. Video akışları Raspberry Pi aracılığıyla yakalanabilir ve OpenCV gibi araçlar kullanılarak işlenebilir. Gerçek zamanlı HD video akışları ayrıca işleme için bir PC'ye veya görüntüleme için bir mobil cihaza geri iletilebilir.

Daha Fazla Genişleme Arayüzü
Raspberry Pi 4B, çift USB 3.0 portu, çift 4K mikro HDMI portu, CSI ve DSI arayüzleri, gigabit Ethernet ve bir Type-C güç kaynağı da dahil olmak üzere çok çeşitli genişletme arayüzleri sunarak çeşitli uygulamalar için olağanüstü çok yönlülük sağlıyor.
Tek Kamera Sürümü
Tek kameralı sürüm, uçuş kontrol cihazıyla seri port üzerinden iletişimi sağlayan bir Raspberry Pi 4B ve bir monoküler kamera içerir. Görsel işleme, Python programlama ve iletişim gibi görevleri destekler. Bu sürüm, Pixhawk'ı kullanma konusunda daha önce deneyimi olan, Ubuntu (Linux), OpenCV, Raspberry Pi ve yerel alan ağı iletişimi konusunda temel bilgiye sahip kullanıcılar için uygundur.
Tek kameralı sürüm, temel özelliklere ek olarak, WiFi üzerinden görüntü ve veri iletimini destekler ve drone'un kontrol edilmesini sağlar. Dronekit-python programlama.

Optik Akış Konumlandırma
Optik Akış Konumlandırma Koşullarında Dronekit-python ile Kapalı Alanda Uçuş Kontrolü

Bu drone geliştirme platformu şunları destekler: ROS, Python programlama, OpenCV görüntü tanıma, 4G uzun mesafe iletimi, Ve Aruco 2D kodlu görsel rehberli inişBu da onu son derece çok yönlü ve yenilikçi kılıyor.

FlySky i6 Uzaktan Kumanda
10 kanallı aygıt yazılımı yüklü ia6b alıcısı, voltaj telemetri modülü ve 1000 metreden fazla uzaktan kumanda menzili ile yeni başlayanların öğrenmesi ve pratik yapması için idealdir.

Radyolink AT9S Uzaktan Kumanda
2000m'den fazla kontrol aralığına sahip 10 kanala sahiptir. Pil voltajı, GPS uydu sayısı, uçuş yüksekliği, koordinatlar, uçuş modu ve daha fazlası hakkında veri sağlayan bir telemetri modülü ile donatılmıştır.

SSS
1. İkincil geliştirme yapabilir miyim? Bağımsız olarak programlama yapabilir miyim?
Cevap evet. Daha önce de belirtildiği gibi, Ardupilot şu anda en yaygın kullanılan açık kaynaklı uçuş kontrol sistemidir ve bu sisteme dayanarak birçok mükemmel yerli ve uluslararası drone modeli geliştirilmektedir.
İkincil geliştirmenin esas olarak iki yönü vardır: Uçuş kontrol geliştirme ve dışa genişleme.
- Uçuş Kontrol Geliştirme
Ardupilot kullanıyoruz, dolayısıyla açık kaynaklı uçuş kontrol geliştirmeyi öğrenmek öncelikle Ardupilot açık kaynaklı projesini incelemeyi içeriyor.
- Güçlü programlama becerilerinin (kaynak kodu C++'dır) yanı sıra ileri matematik bilgisi (ayrık matematik, yineleme, doğrusallaştırma), Kalman filtrelemesi ve gömülü geliştirme bilgisi gereklidir.
- Sağlam bir teorik temele ihtiyaç vardır. Bu sizi insansız sistemler geliştirme ve uçuş kontrol Ar-Ge'si üzerinde çalışmaya hazırlar.
Uçuş kontrol geliştirmeye odaklanmak istiyorsanız, işin çoğunun bilgisayarınızda yapılması gerekir:
- Programlama ortamının kurulması, uçuş kontrol kaynak kodlarının indirilmesi, mimarisinin ve fonksiyonel modüllerinin incelenmesi vb.
- Kod çerçevesini öğrendikten sonra mevcut kod üzerinden programlamaya başlayabilirsiniz.
Temel bir uçuş kontrol modeliyle başlayın ve rehberlik için sunduğumuz Ardupilot uçuş kontrol ders kitabına başvurun.
- Dış Genişleme Geliştirme
Harici genişleme, uçuş kontrol cihazının ayrılmış arayüzleri aracılığıyla görevlerinize ve senaryolarınıza göre harici cihazlar eklemenize olanak tanır. Örneğin:
- İç mekan konumlandırma ve gezinme için optik akış modülü ekleyin.
- Engellerden kaçınmak için lazer radar ekleyin.
- Otonom uçuş ve rota planlamasını etkinleştirmek için telemetriyi kullanın.
- Gemiye bir bilgisayar takın (örneğin Raspberry Pi) ve Dronekit-Python veya ROS kullanarak drone'u kontrol etmek için programlama yapın.
Gemiye yerleşik bir bilgisayar eklemenin amacı, aşağıdakiler gibi daha karmaşık görevleri yerine getirebilmektir:
- Görsel tanıma için Raspberry Pi kamerasını kullanmak (OpenCV, YOLO, vb. gerektirir).
- İletişim protokollerini birleştirerek drone'un uçuşunu kontrol etmek.
- Uçuş verilerinin veya yüksek çözünürlüklü videoların ağlar üzerinden iletilmesi.
Bu fonksiyonların sadece uçuş kontrolörüne güvenerek gerçekleştirilmesi mümkün değildir.
Dış açılım çalışmaları ağırlıklı olarak uygulamalara odaklanıyor ki bu aynı zamanda ülke çapındaki çoğu yarışmanın da yönelimidir.Öğrendikten sonra görsel tanıma, yapay zekanın drone'larla entegrasyonu gibi akıllı drone'ların kritik alanlarını keşfedebilirsiniz.
2. Bağımsız gelişimin ön koşulları nelerdir?
İnsansız hava araçları hakkında bilgi edinmek kademeli bir süreçtir. İnsansız hava araçları sistemleri disiplinler arası ve bütünleştiricidir ve geniş bir bilgi alanı yelpazesini içerir. İnsansız hava aracı geliştirmeyi öğrenmek için aşağıdaki temeller gereklidir:
- Lehimleme havyaları, çeşitli tornavidalar ve diğer aletleri kullanma becerisi de dahil olmak üzere temel uygulamalı beceriler.
- Temel elektronik bilgisi: Voltaj, akım, güç, polarite ve sinyaller gibi kavramlar.
- Otomasyon kontrolünün temel bilgileri: PID kontrolü, geri besleme, dijital sinyaller, analog sinyaller, vb.
- Temel bilgisayar becerileri: sürücüler, seri portlar, baud hızları, donanım yazılımı sürümleri, yazılım sürümleri.
- Pixhawk drone'ları hakkında temel bilgi.
- Ubuntu işletim sisteminin temel bilgileri.
- Programlama dili yeterliliği: C++ ve Python gibi.
Respberry PI Drone Nasıl Yapılır?
Related Collections