






Ürünlerimiz CE ve ROHS sertifikasyonunu geçmiştir ve çoğu görünüm patentleri ve faydalı model patentleri için başvuruda bulunmuştur
Feetech SCS225-C006 - 7.4V 19kg 180° 0.192sec/60° 25T Seri Kontrol BUS Servo Robot Arduin Çift Eksenli Shafe robot roborock iRobot Roomba robot vakum Servo
Feetech SCS225-C006 - 7.4V 19kg 180° 0.192sec/60° 25T Seri Kontrol BUS Servo Robot Arduin Çift Eksenli Shafe robot roborock iRobot Roomba robot vakum Servo
Feetech
Normal fiyat
$21.25 USD
Normal fiyat
İndirimli fiyat
$21.25 USD
Birim fiyat
/
Vergiler dahil.
Kargo, ödeme sayfasında hesaplanır.
Teslim alım stok durumu yüklenemedi
TEKNİK ÖZELLİKLER
Marka Adı: Feetech
Menşei: Anakara Çin
Malzeme: Plastik
Plastik Tür: PC
RC Parçaları ve Aksesuarları: Piller - LiPo
Boyut: 10*10*10
Araç Türü İçin: Arabalar
Kullanım: Araçlar ve Uzaktan Kumandalı Oyuncaklar
Parçaları/Aksesuarları Yükseltme: Lityum Pil
Uzaktan Kumanda Çevre Birimleri/Cihazları: Uzaktan Kumanda
Alet Sarf Malzemeleri: Pil
Miktar: 1 adet
Teknik parametreler: KV1100
Model Numarası: SCS225-C006
Dört Tekerlekten Çekiş Özellikleri: Motorlar
Dingil mesafesi: Vidalar
Model Numarası: SCS225-C006
Boyut: 45,23 mm X 24,73 mm X 35 mm
Ağırlık: 55± 1g
Dişli tipi: Bakır
Sınır açısı: Sınır YOK
Rulman: Bilyalı rulmanlar
Korna dişlisi spline: 25D
Motor: Çekirdeksiz motor
Çalışma Gerilim Aralığı: 6-7,4V
En yüksek durma torku: 19,5kg.cm@6V
Nominal tork: 6,5kg.cm@6V
Protokol Türü: Yarı Çift Yönlü Asenkron Seri İletişim
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

ODM ve OEM ve Özel Üretim konusunda uzmanlaşmış 1.Logonuz etiketlenebilir veya yazdırılabilir
2.Servo Teli
3.Ambalaj:PE Torba, Renkli Kutu, plastik kutu ile
Logonuz
4.Kablo konektörü
5.Özelleştirilmiş Çeşitli geniş çalışma voltajı servo
2.Servo Teli
3.Ambalaj:PE Torba, Renkli Kutu, plastik kutu ile
Logonuz
4.Kablo konektörü
5.Özelleştirilmiş Çeşitli geniş çalışma voltajı servo
Ürün Kullanımı

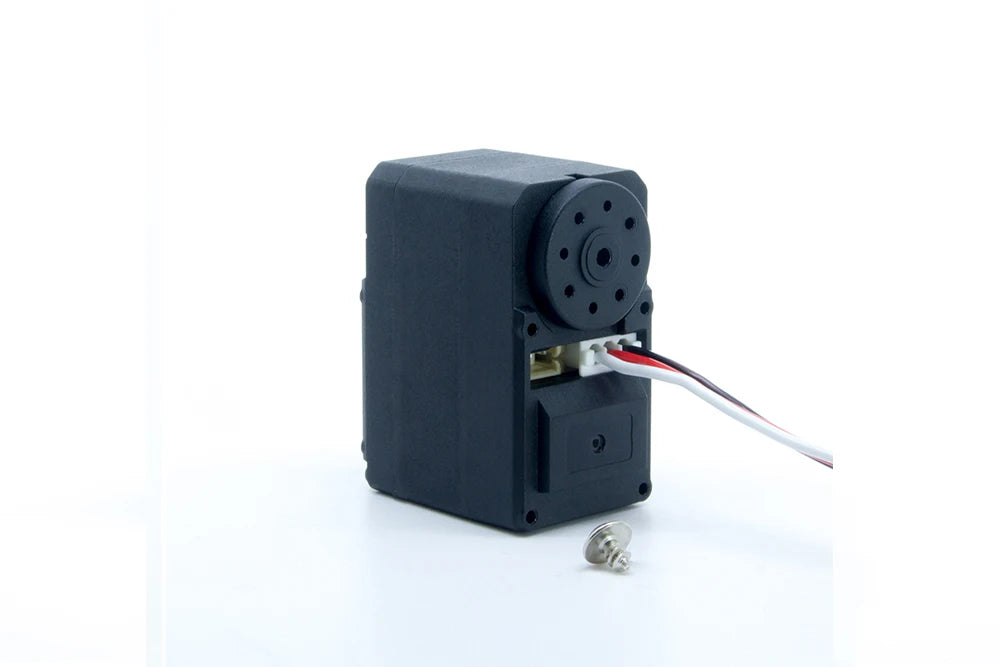
FEETECH 7.4V 20KG.CM Plastik Kasa Metal Dişli Manyetik Enkoder Çift şaftlı TTL Seri Bus Servo
Ayrıntılı Görseller




Ayrıntılı Görseller
FEETECH 7.4V 20KG.CM Plastik Kasa Metal Dişli Manyetik Enkoder Çift şaftlı TTL Seri Bus Servo
Elektronik kontrol Fonksiyonu:
1.Hızlanma start stop fonksiyonu: hız ve hızlanma değeri ayarlanabilir, hareket etkisi daha yumuşaktır.
2.Yüksek hassasiyet, 360 derece mutlak konum 4096 bit hassasiyeti, en yüksek konum çözünürlüğü 0,088 derecedir, kontrol 90 derece ise giriş 4096/360*90 = 1024, kontrol 180 derece ise giriş 4096/360*180 = 2048, hesaplamak için .
3.Dört çalışma modu geçişi vardır (mod 0 konum servo, mod 1 hız kapalı çevrim, mod 2 hız açık çevrim, mod 3 adım servo).
1)、、 Mod 0:Konum modu, varsayılan mod. Bu modda 360 derece mutlak açı kontrolü gerçekleştirilebilmektedir. Hızlanma hareketini destekleyin.
2)、Mod 1:Hız kapalı döngü, programlama arayüzünde çalışma modu 1'e ayarlanır, hız kapalı döngü moduna geçin ve çalıştırmak için hız sütununa karşılık gelen hızı girin .
3)、Mod 2:Hız açık çevrim, programlama arayüzünde çalışma modu 2'ye ayarlanır, hız açık çevrim moduna geçin ve çalıştırmak için zaman sütununa karşılık gelen süreyi girin.
4)、Mod3:Adım modu: programlama arayüzünde maksimum/minimum açı limiti 0'a ayarlanır ve çalışma modu 3'e ayarlanır. Adım moduna geçin. Hedef konuma doğru adım atmak için konum çubuğuna konumu girin. Aynı yönde adım atmaya devam etmek için konuma tekrar tıklayın.
4、Çoklu dönüş modu, 360 derece mutlak kontrol ve geri bildirim, en yüksek doğruluk altında, mutlak konum kontrolü artı veya eksi 7 tur olabilir, ancak Güç çevrimlerinin sayısı kaydedilmez, yalnızca mutlak konum geri besleme değeri korunur.
5、Tek tuşla kalibrasyon, herhangi bir pozisyonda 360 derece açılı kurulum, (40 (ondalık) adres girişi 128 (ondalık)) tek tuşla düzeltme akım konumu ortadır (2048 (ondalık)).
6、TTL iletişim seviyesi, yarım çift yönlü asenkron iletişim, okuma ve yazma parametrelerini ayarlamak için veri yolu protokolü desteği ve senkron okuma fonksiyonu ekleme (sırayla veri yolu üzerindeki her servodan geri okuma talimatını almak için bir talimat gönderin.)
7、Çoklu koruma, (aşırı yük, aşırı akım, aşırı gerilim, aşırı ısınma, anahtar ayarı, durum parametre değişimi)
1)、Aşırı yük koruması: konum algılama yoluyla, başlangıç konumundan başlangıç konumuna hareket sırasında hedef konumu, engellerin engellenmesiyle karşılaşıldıktan sonra mevcut konumun hedef konum olmadığı tespit edildiğinde, boşaltma kuvveti 2S sürer (varsayılan engelleme kuvvetinin %20'si). Yeni bir komut tetiklenene kadar, Serbest bırakma koruması
2)、Aşırı akım koruması: ayarlanan akım değeri aracılığıyla, akımın ayarlanan akım değerine ulaşıp ulaşmadığını kontrol edin. Ayarlanan akım değerine ulaştığında kuvveti bırakın (varsayılan tork 0'dır). Yeni bir komut tetiklenene kadar, Serbest bırakma koruması
3)、Aşırı gerilim koruması: mevcut gerilim değerini algılar. Ayarlanan voltaj değerini aşarsa, alarm aşırı voltajı gösterecektir.
4)、Aşırı ısınma koruması: mevcut motor sıcaklığını algılar. Sıcaklık ayarlanan değeri aşarsa, alarm aşırı ısınmayı gösterecektir.
8:Çoklu geri bildirim:
1)Yük geri bildirimi: akım kontrol çıkışı motorun voltaj görev döngüsünü çalıştırır ve tam ölçek 1000 = %100 tork çıkışıdır.
2)Akım geri beslemesi: Servo çalışma akımı, 1 = 6,5mA
3)Voltaj geri beslemesi: Servo çalışma voltajı,70=7V,0,1V
4)Sıcaklık geri bildirimi: mevcut servonun dahili çalışma sıcaklığı (ölçüm sıcaklığı)。
5)Hız geri bildirimi: mevcut motor dönüş hızını ve birim zamandaki adım sayısını (saniye başına) geri bildirim
9、PID parametrelerini açın.
1.Hızlanma start stop fonksiyonu: hız ve hızlanma değeri ayarlanabilir, hareket etkisi daha yumuşaktır.
2.Yüksek hassasiyet, 360 derece mutlak konum 4096 bit hassasiyeti, en yüksek konum çözünürlüğü 0,088 derecedir, kontrol 90 derece ise giriş 4096/360*90 = 1024, kontrol 180 derece ise giriş 4096/360*180 = 2048, hesaplamak için .
3.Dört çalışma modu geçişi vardır (mod 0 konum servo, mod 1 hız kapalı çevrim, mod 2 hız açık çevrim, mod 3 adım servo).
1)、、 Mod 0:Konum modu, varsayılan mod. Bu modda 360 derece mutlak açı kontrolü gerçekleştirilebilmektedir. Hızlanma hareketini destekleyin.
2)、Mod 1:Hız kapalı döngü, programlama arayüzünde çalışma modu 1'e ayarlanır, hız kapalı döngü moduna geçin ve çalıştırmak için hız sütununa karşılık gelen hızı girin .
3)、Mod 2:Hız açık çevrim, programlama arayüzünde çalışma modu 2'ye ayarlanır, hız açık çevrim moduna geçin ve çalıştırmak için zaman sütununa karşılık gelen süreyi girin.
4)、Mod3:Adım modu: programlama arayüzünde maksimum/minimum açı limiti 0'a ayarlanır ve çalışma modu 3'e ayarlanır. Adım moduna geçin. Hedef konuma doğru adım atmak için konum çubuğuna konumu girin. Aynı yönde adım atmaya devam etmek için konuma tekrar tıklayın.
4、Çoklu dönüş modu, 360 derece mutlak kontrol ve geri bildirim, en yüksek doğruluk altında, mutlak konum kontrolü artı veya eksi 7 tur olabilir, ancak Güç çevrimlerinin sayısı kaydedilmez, yalnızca mutlak konum geri besleme değeri korunur.
5、Tek tuşla kalibrasyon, herhangi bir pozisyonda 360 derece açılı kurulum, (40 (ondalık) adres girişi 128 (ondalık)) tek tuşla düzeltme akım konumu ortadır (2048 (ondalık)).
6、TTL iletişim seviyesi, yarım çift yönlü asenkron iletişim, okuma ve yazma parametrelerini ayarlamak için veri yolu protokolü desteği ve senkron okuma fonksiyonu ekleme (sırayla veri yolu üzerindeki her servodan geri okuma talimatını almak için bir talimat gönderin.)
7、Çoklu koruma, (aşırı yük, aşırı akım, aşırı gerilim, aşırı ısınma, anahtar ayarı, durum parametre değişimi)
1)、Aşırı yük koruması: konum algılama yoluyla, başlangıç konumundan başlangıç konumuna hareket sırasında hedef konumu, engellerin engellenmesiyle karşılaşıldıktan sonra mevcut konumun hedef konum olmadığı tespit edildiğinde, boşaltma kuvveti 2S sürer (varsayılan engelleme kuvvetinin %20'si). Yeni bir komut tetiklenene kadar, Serbest bırakma koruması
2)、Aşırı akım koruması: ayarlanan akım değeri aracılığıyla, akımın ayarlanan akım değerine ulaşıp ulaşmadığını kontrol edin. Ayarlanan akım değerine ulaştığında kuvveti bırakın (varsayılan tork 0'dır). Yeni bir komut tetiklenene kadar, Serbest bırakma koruması
3)、Aşırı gerilim koruması: mevcut gerilim değerini algılar. Ayarlanan voltaj değerini aşarsa, alarm aşırı voltajı gösterecektir.
4)、Aşırı ısınma koruması: mevcut motor sıcaklığını algılar. Sıcaklık ayarlanan değeri aşarsa, alarm aşırı ısınmayı gösterecektir.
8:Çoklu geri bildirim:
1)Yük geri bildirimi: akım kontrol çıkışı motorun voltaj görev döngüsünü çalıştırır ve tam ölçek 1000 = %100 tork çıkışıdır.
2)Akım geri beslemesi: Servo çalışma akımı, 1 = 6,5mA
3)Voltaj geri beslemesi: Servo çalışma voltajı,70=7V,0,1V
4)Sıcaklık geri bildirimi: mevcut servonun dahili çalışma sıcaklığı (ölçüm sıcaklığı)。
5)Hız geri bildirimi: mevcut motor dönüş hızını ve birim zamandaki adım sayısını (saniye başına) geri bildirim
9、PID parametrelerini açın.
Related Collections






