ST-3046-C001 6V 40kg seri veriyolu akıllı servodur, tam alüminyum alaşımlı kasayı benimser, çekirdeksiz motor, çelik dişli kutusu, çekirdeksiz motor, Feetech kendi araştırdı ve TTL kontrol panosunu geliştirdi,12 bit yüksek hassasiyetli manyetik kodlama sensörü. Durma torku 40kg.cm'dir, konum, hız, voltaj, akım, sıcaklık, yük parametrelerini geri besleyebilir, böylece aşırı yük ve aşırı akım koruması gerçekleştirilebilir. Endüstriyel ekipman, robot ve iletim uygulama senaryolarında uygulamaya uygundur.
SKU:STS3046
Ürün Adı: 7.4V 40KG.CM Plastik Kasa Metal Dişli Manyetik Kodlayıcı Tek şaftlı TTL Seri Veri Yolu Servo
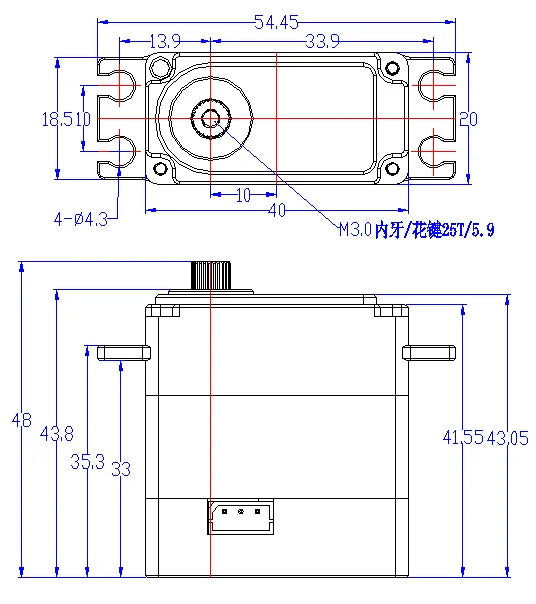
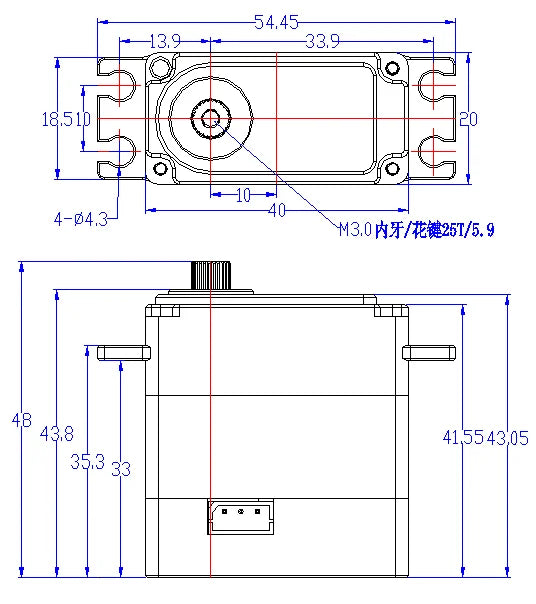
Görünüm boyutu: 45.2X24.7X35mm(plana bakın)
Bayılma Torku:[email protected]
Durma Hızı:[email protected]
Geri bildirim: yük / konum / hız / gerilim / akım / sıcaklık
Elektronik koruma: aşırı ısınma / aşırı akım / aşırı gerilim / aşırı yük koruması




Yapısal Özellikler:
Kabuk, daha yüksek mukavemete sahip mühendislik plastik kabuğunu benimser,Merkez mesafesini optimize eder,Daha kompakt genel yapı,Servo dişlisi 1:345 bakır Dişli kombinasyonunu benimser,daha yüksek tork;Aynı Torkta ,Standart servo boyutuyla karşılaştırın,daha düşük profilli görünüyor(5mm),Gövde çift eksenli yapı tasarımını benimser,Dairenin yapısal özellikleri katı astarlı,Metal ana yardımcı servo boynuzları ile çift giden kabloların kablolama modu,Bunlar için uygundur dört ayaklı robot, yılan robot, masaüstü robot, insansı robot ve mekanik kolda uygulama.
Elektronik kontrol Fonksiyonu:
1.Hızlanma start stop fonksiyonu: hız ve hızlanma değeri ayarlanabilir, hareket etkisi daha yumuşaktır.
2.Yüksek hassasiyet, 360 derece mutlak konum 4096 bit hassasiyeti, en yüksek konum çözünürlüğü 0,088 derecedir, kontrol 90 derece ise giriş 4096/360*90 = 1024, kontrol 180 derece ise giriş 4096/360*180 = 2048 , hesaplamak için.
3.Dört çalışma modu geçişi vardır (mod 0 pozisyon servo, mod 1 hız kapalı çevrim, mod 2 hız açık çevrim, mod 3 adım servo).
1)、Mod 0:Konum modu, varsayılan mod. Bu modda 360 derece mutlak açı kontrolü gerçekleştirilebilmektedir. Hızlanma hareketini destekleyin.
2)、Mod 1:Hız kapalı döngü, programlama arayüzünde çalışma modu 1'e ayarlanır, hız kapalı döngü moduna geçin ve çalıştırmak için hız sütununa karşılık gelen hızı girin .
3)、Mod 2:Hız açık çevrim, programlama arayüzünde çalışma modu 2'ye ayarlanır, hız açık çevrim moduna geçin ve çalıştırmak için zaman sütununa karşılık gelen süreyi girin.
4)、Mod3:Adım modu: programlama arayüzünde maksimum/minimum açı limiti 0'a ayarlanır ve çalışma modu 3'e ayarlanır. Adım moduna geçin. Hedef konuma doğru adım atmak için konum çubuğuna konumu girin. Aynı yönde adım atmaya devam etmek için konuma tekrar tıklayın.
4、Çoklu dönüş modu, 360 derece mutlak kontrol ve geri bildirim, en yüksek doğruluk altında, mutlak konum kontrolü artı veya eksi 7 tur olabilir, ancak Güç çevrimlerinin sayısı kaydedilmez, yalnızca mutlak konum geri besleme değeri korunur.
5、Tek tuş kalibrasyonu, herhangi bir konumda 360 derece açılı kurulum, (40 (ondalık) adres girişi 128 (ondalık)) bir anahtar düzeltme mevcut konumu ortadır (2048 (ondalık))).
6、TTL iletişim seviyesi, yarı çift yönlü asenkron iletişim, okuma ve yazma parametrelerini ayarlamak için veri yolu protokolü desteği ve senkron okuma işlevi ekleme (bir veri yolu üzerindeki her servodan geri okuma talimatını sırayla alma talimatı.)
7、Çoklu koruma, (aşırı yük, aşırı akım, aşırı gerilim, aşırı ısınma, anahtar ayarı, durum parametresi değişimi)
1) Aşırı yük koruması: konum algılama yoluyla, başlangıç konumundan hedef konuma hareket sırasında, engellerin engellenmesiyle karşılaşıldıktan sonra mevcut konumun hedef konum olmadığı tespit edildiğinde, boşaltma kuvveti 2S sürer (%20) varsayılan engelleme kuvveti). Yeni bir komut tetiklenene kadar, Serbest bırakma koruması
2)、Aşırı akım koruması: ayarlanan akım değeri aracılığıyla, akımın ayarlanan akım değerine ulaşıp ulaşmadığını kontrol edin. Ayarlanan akım değerine ulaştığında kuvveti bırakın (varsayılan tork 0'dır). Yeni bir komut tetiklenene kadar, Serbest bırakma koruması
3)、Aşırı gerilim koruması: mevcut gerilim değerini algılar. Ayarlanan voltaj değerini aşarsa, alarm aşırı voltajı gösterecektir.
4)、Aşırı ısınma koruması: mevcut motor sıcaklığını algılar. Sıcaklık ayarlanan değeri aşarsa, alarm aşırı ısınmayı gösterecektir.
8:Çoklu geri bildirim:
1)Yük geri bildirimi: akım kontrol çıkışı motorun voltaj görev döngüsünü çalıştırır ve tam ölçek 1000 = %100 tork çıkışıdır.
2)Akım geribildirimi: Servo çalışma akımı, 1 = 6,5mA
3)Gerilim geri bildirimi: Servo çalışma gerilimi,70=7V,0,1V
4)Sıcaklık geri bildirimi: mevcut servonun dahili çalışma sıcaklığı (sıcaklığın ölçülmesi)。
5)Hız geri bildirimi: mevcut motor dönüş hızının ve birim zamandaki adım sayısının (saniyede) geri bildirimi

Hizmetlerimiz: Orijinal Tasarım Üretimi (ODM) ve Orijinal Ekipman İmalatı (OEM) için Tek Noktadan Özelleştirilmiş Çözümler sunuyoruz. Yeteneklerimiz arasında elektronik tasarım, yapısal tasarım ve üretim yer almaktadır.Ayrıca PWM, RS485, 3V-24v çalışma ve 0-360° geri besleme çark kontrolü gibi özelliklere sahip servolar gibi ürünler için özelleştirme hizmetleri de sağlıyoruz.
ODM ve OEM ve Özel Üretim konusunda uzmanlaşmış 1.Logonuz etiketlenebilir veya yazdırılabilir
2.Servo Teli
3.Ambalaj:PE Torba, Renkli Kutu, plastik kutulu
Logonuz
4.Kablo konektörü
5.Özelleştirilmiş Çeşitli geniş çalışma voltajı servo
9、PID parametrelerini açın.
Ürünlerimiz CE ve ROHS sertifikasyonunu geçmiştir ve çoğu görünüm patentleri ve faydalı model patentleri için başvuruda bulunmuştur
Ürünlerimiz 'CE', 'RoHS' ve 'REACH' sertifikalarına sahiptir. Ayrıca tasarımlarımız için görünüm patentlerine ve model patentlerine sahibiz.