

YÜKSEK TORK HTDW-6056-36-NE-JC Motor (Çapraz Makaralı Versiyon), 36 Oran, 10Nm Nominal, 12-48V
YÜKSEK TORK HTDW-6056-36-NE-JC Motor (Çapraz Makaralı Versiyon), 36 Oran, 10Nm Nominal, 12-48V
HIGH TORQUE
Normal fiyat
$362.00 USD
Normal fiyat
İndirimli fiyat
$362.00 USD
Birim fiyat
/
Vergiler dahil.
Kargo, ödeme sayfasında hesaplanır.
Teslim alım stok durumu yüklenemedi
Genel Bakış
YÜKSEK TORK HTDW-6056-36-NE-JC Motor, 36 oranında bir azaltma oranına ve çapraz rulman yapısına sahip yüksek tork motor modülüdür. 12-48V çalışma için belirtilmiş olup, 14-bit giriş/çıkış enkoder çözünürlüğü ile tasarlanmıştır ve hassas düşük hızda, yüksek torklu hareket sağlamak için tasarlanmıştır.
Temel Özellikler
- Model: HTDW-6056-36-NE-JC (ürün tasarımında HTDW-6056-36-JC olarak da etiketlenmiştir)
- Çapraz Rulman Versiyonu
- Düşük boşluk: <10Arcmin
- Encoder çözünürlüğü: 14-bit (giriş), 14-bit (çıkış)
- Kontrol frekansı: 3kHz
- Hızlı tepki süresi: ≤200us
Teknik Özellikler
| Uzunluk ve Genişlik | 60mm |
| Yükseklik | 56mm |
| Ağırlık | 570g |
| Boşluk | <10Arcmin |
| Tekrar Pozisyonlama Hassasiyeti | <12Arcmin |
| Mutlak Pozisyonlama Hassasiyeti | <15Arcmin |
| Moment Sabiti | / |
| Kutuç Çifti Sayısı | 14 |
| İndirme Oranı | 36 |
| Kilitleme rotoru Torku | 36Nm |
| Yük olmadan RPM | 60RPM |
| Nominal Tork | 10Nm |
| Nominal RPM | 50RPM |
| Değerlendirme | 52W |
| Voltaj Aralığı | 12-48V |
| Tepe Akımı | 10A |
| Hız Kontrol Doğruluğu | ±10% |
| Giriş Kodlayıcı Çözünürlüğü | 14-bit |
| Baud Hızı | 5Mbps |
| Nominal Akım | 3A |
| Kontrol Doğruluğu | ±20% |
| Yanıt Süresi | ≤200us |
| Çıkış Kodlayıcı Çözünürlüğü | 14-bit |
| Kontrol Frekansı | 3kHz |
Uygulamalar
- İnsansı Robotlar
- Robotik Kollar
- Ekoskeletonlar
- Dört Ayaklı Robotlar
- AGV Araçları
- ARU Robotları
Entegrasyon desteği ve ön satış soruları için iletişim kurun [email protected] or ziyaret edin https://rcdrone.top/.
Kılavuzlar & İndirmeler
- YÜKSEK TORK Motor Hata Ayıklama Asistanı Kullanım kılavuzu (PDF)
- Hata Ayıklama Kılavuzu (PDF)
- 1.2 fdcan Protokol Analizi (PDF)
- Kullanım Kılavuzu (PDF)
- HTDW-6056-36-NE-JC 3D Model (ZIP içindeki STP)
Detaylar

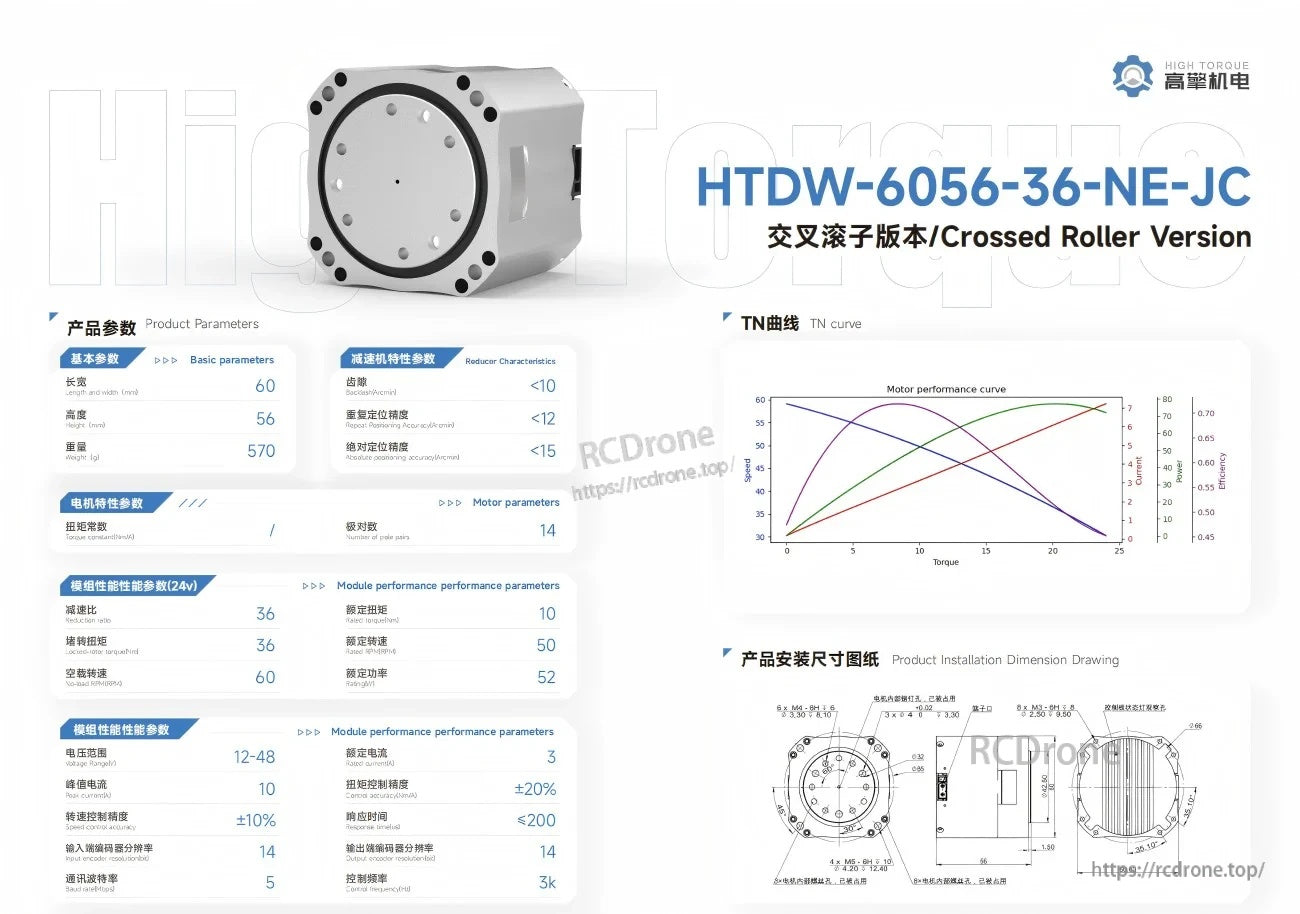
Çapraz makaralı versiyon için detaylı parametreler ve montaj boyutları, entegrasyondan önce uyum ve performansı doğrulamaya yardımcı olur.
Related Collections

