Holybro Pixhawk Jetson 6X / 6X Pro ve NVIDIA Jetson'lu Anakart Paketi
Holybro Pixhawk Jetson 6X / 6X Pro ve NVIDIA Jetson'lu Anakart Paketi
HolyBro
Teslim alım stok durumu yüklenemedi
Genel bakış
The Holybro Pixhawk Jetson Taban Tahtası temel alınarak tasarlanmıştır Pixhawk Otopilot Otobüsü (PAB) açık kaynaklı spesifikasyonu ve sorunsuz bir şekilde entegre olur NVIDIA Jetson Orin NX/Nano Taşıyıcı Anakart. PAB Form Faktörü herhangi bir PAB uçuş kontrolörüyle uyumluluğa izin verir, buna şunlar dahildir: Pixhawk 6XBu kart, hesaplama gücünü birleştirir NVIDIA Jetson uçuş kontrol yetenekleriyle PixhawkBu da onu gelişmiş otonom uygulamalar için ideal hale getiriyor.
Temel Özellikler
-
Birleşik Sistem: Birleştirir Pixhawk Ve NVIDIA Jetson tek bir tahtada.
-
Sorunsuz Bağlantı: Jetson ve Pixhawk, UART, CAN ve Ethernet anahtarı.
-
Geniş Uyumluluk: Destekler Jetson Orin NX ve Orin Nano.
-
Yüksek Hızlı Genişleme: Özellikler 2x M.2 anahtar yuvası WiFi/Bluetooth ve NVMe SSD için.
-
Pixhawk 6X Entegrasyonu: İle donatılmış ICM-45686 sensörleri Gelişmiş uçuş kontrolü için.
İşlemciler ve Sensörler
FMU İşlemcisi:
-
STM32H753
-
32-bit ARM Cortex-M7, 480MHz
-
2MB Flaş Bellek, 1MB RAM
G/Ç İşlemcisi:
-
STM32F103
-
32-bit ARM Cortex-M3, 72MHz
-
64KB SRAM
Gemideki Sensörler (Rev8)
-
İvmeölçer/Jiroskop: 3x ICM-45686 (BalancedGyro™ Teknolojisi ile)
-
Barometre: ICP20100 ve BMP388
-
Manyetometre: BMM150
Anakart Bağlantı Noktaları ve Bağlantı
Jetson Konnektörleri
-
2x Gigabit Ethernet Bağlantı Noktaları (Jetson ve Autopilot'a bağlandı RTL8367S Ethernet anahtarı)
-
2x MIPI CSI Kamera Girişleri (Her biri 4 şeritli, 22-Pin Raspberry Pi Kamera FFC)
-
2x USB 3.0 Ana Bilgisayar Bağlantı Noktaları (USB-A, 5A akım sınırı)
-
2x USB 2.0 Ana Bilgisayar Bağlantı Noktası (5-Pinli JST-GH)
-
Hata Ayıklama için USB 2.0 (USB-C)
-
Mini HDMI Çıkışı
-
2x M.2 Yuvası:
-
NVMe SSD (PCIEx4) için Anahtar M (2242)
-
WiFi/BT (PCIEx2, UART, USB, I2S) için Anahtar E (2230)
-
-
CAN Bağlantı Noktası (Bağlı Otopilot CAN2, 4-Pinli JST-GH)
-
SPI, I2C, I2S, UART Portları (Çeşitli JST-GH konnektörleri)
-
Fan Güç Bağlantı Noktası
-
Güç Girişi: XT30 Konnektörü, 7-21V (3S-4S)
-
UBEC 12A (3-14S) >4S uygulamaları için önerilir
Otopilot Konnektörleri
-
Pixhawk Otopilot Otobüs Arayüzü: 100-Pin ve 50-Pin Hirose DF40
-
Yedekli Dijital Güç Modülü Girişleri
-
I2C Güç İzleme Desteği
-
GPS ve Güvenlik Anahtarı Bağlantı Noktaları: 10-Pin ve 6-Pin JST-GH
-
2x CAN Bağlantı Noktası (4-Pin JST-GH)
-
3x Telemetri Portu (JST-GH, biri Jetson'ın UART1'ine bağlı)
-
16 PWM Çıkışı (2x 10-Pin JST-GH)
-
USB 2.0 (USB-C ve 4-Pin JST-GH)
-
DSM Girişi (3-Pin JST-ZH, 1,5 mm Aralık)
-
RC Girişi (PPM/SBUS, 5-Pin JST-GH)
-
Harici Sensör Veri Yolu için SPI Bağlantı Noktası (SPI5, 11-Pin JST-GH)
-
2x Hata Ayıklama Portu (FMU ve IO, 10-Pin JST-SH)
Güç Gereksinimleri
-
Giriş Voltajı: 7-21V (3S-4S) XT30 Konnektörü aracılığıyla
-
Minimum Güç Gereksinimi: 8V/3A (çevre birimlerine göre değişir)
-
Yedeklilik ve daha yüksek voltaj uygulamaları için Harici UBEC 12A'yı (3-14S) destekler
-
Dahili Aşırı Gerilim Koruması
Boyutlar ve Ağırlık
-
Tahta Boyutu: 126x80x38mm (Jetson ve Uçuş Kontrolörü olmadan)
-
Ağırlık: 203.2 gr (Jetson, Heatsink, Uçuş Kontrolcüsü, SSD, Wi-Fi Modülü dahil)
UBEC-12A Özellikleri
-
Giriş Voltajı: 3~14S (XT30)
-
Çıkış Voltajı: 6,0V/7,2V/8,0V/9,2V (Jetson için 7.2V önerilir)
-
Sürekli Çıkış Akımı: 12A
-
Patlama Çıkış Akımı: 24A
-
Boyut: 48x33,6x16,3 mm
-
Ağırlık: 47,8 gr
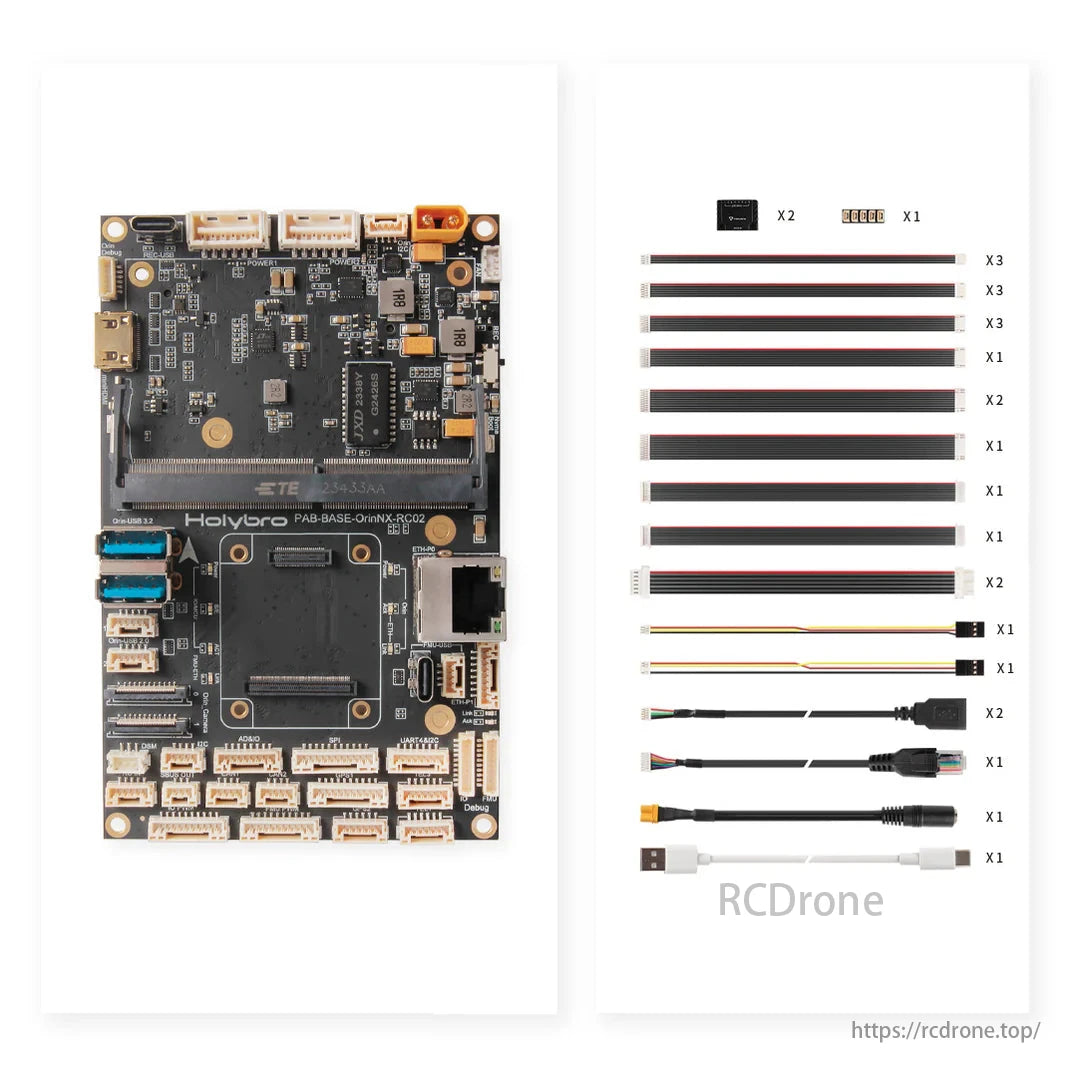
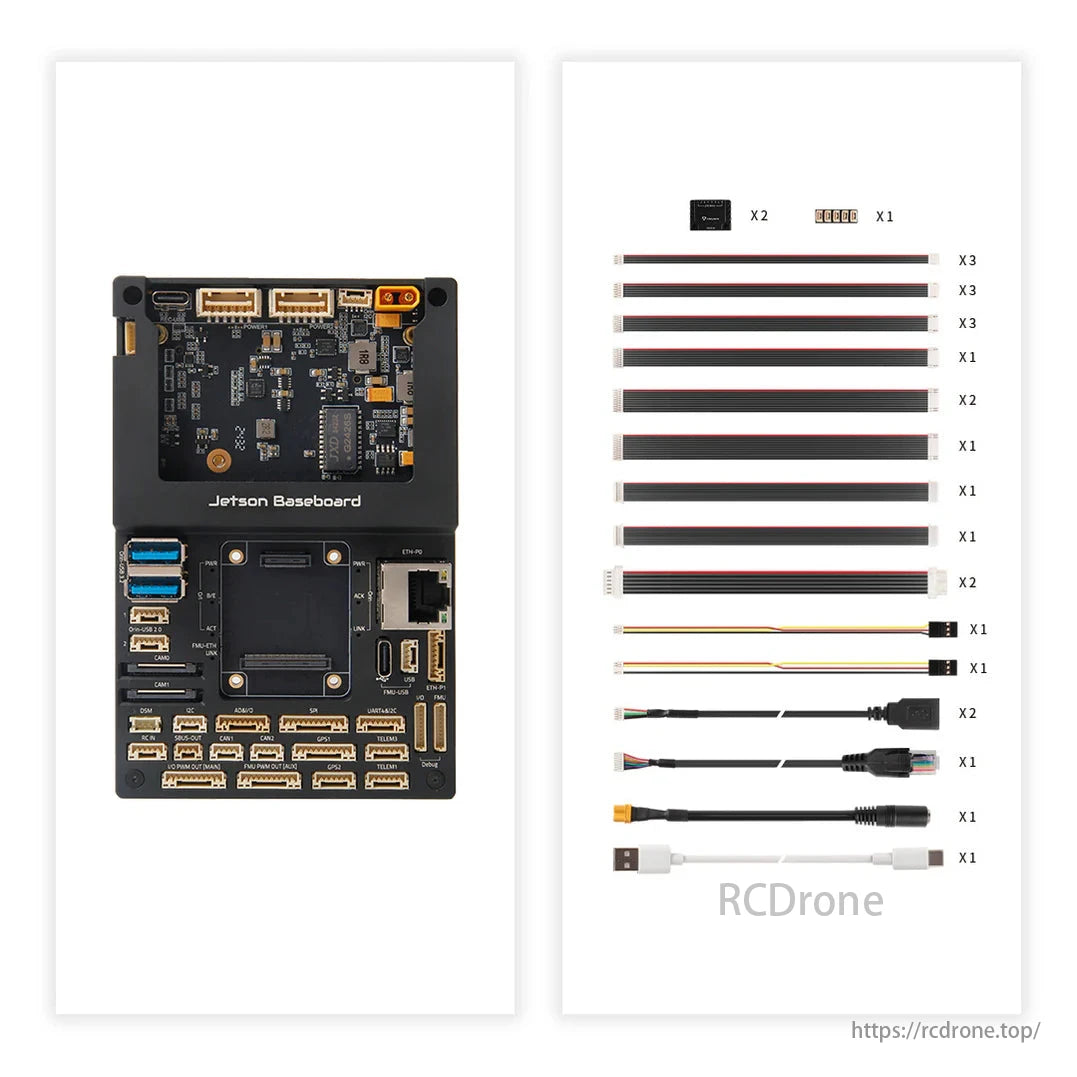
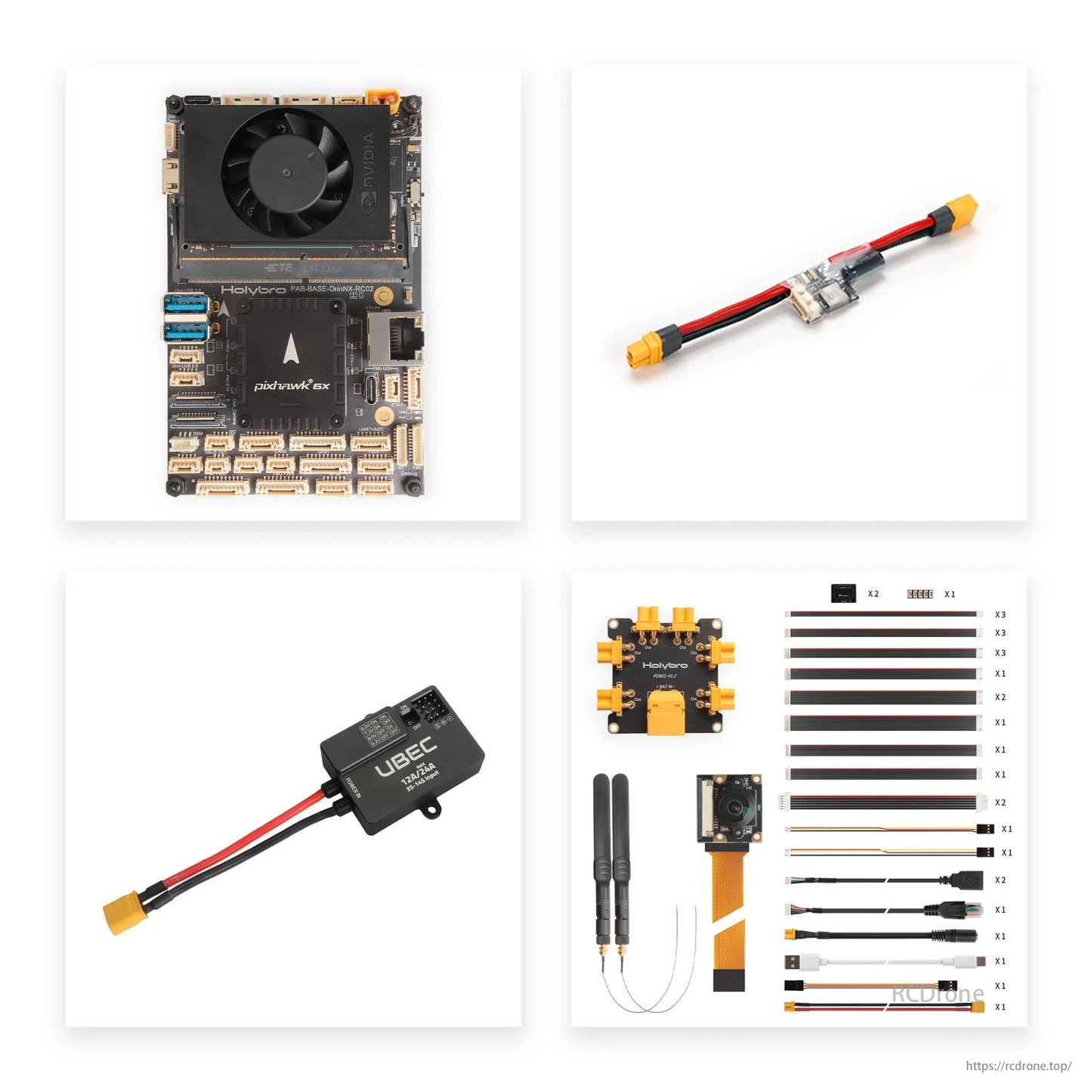
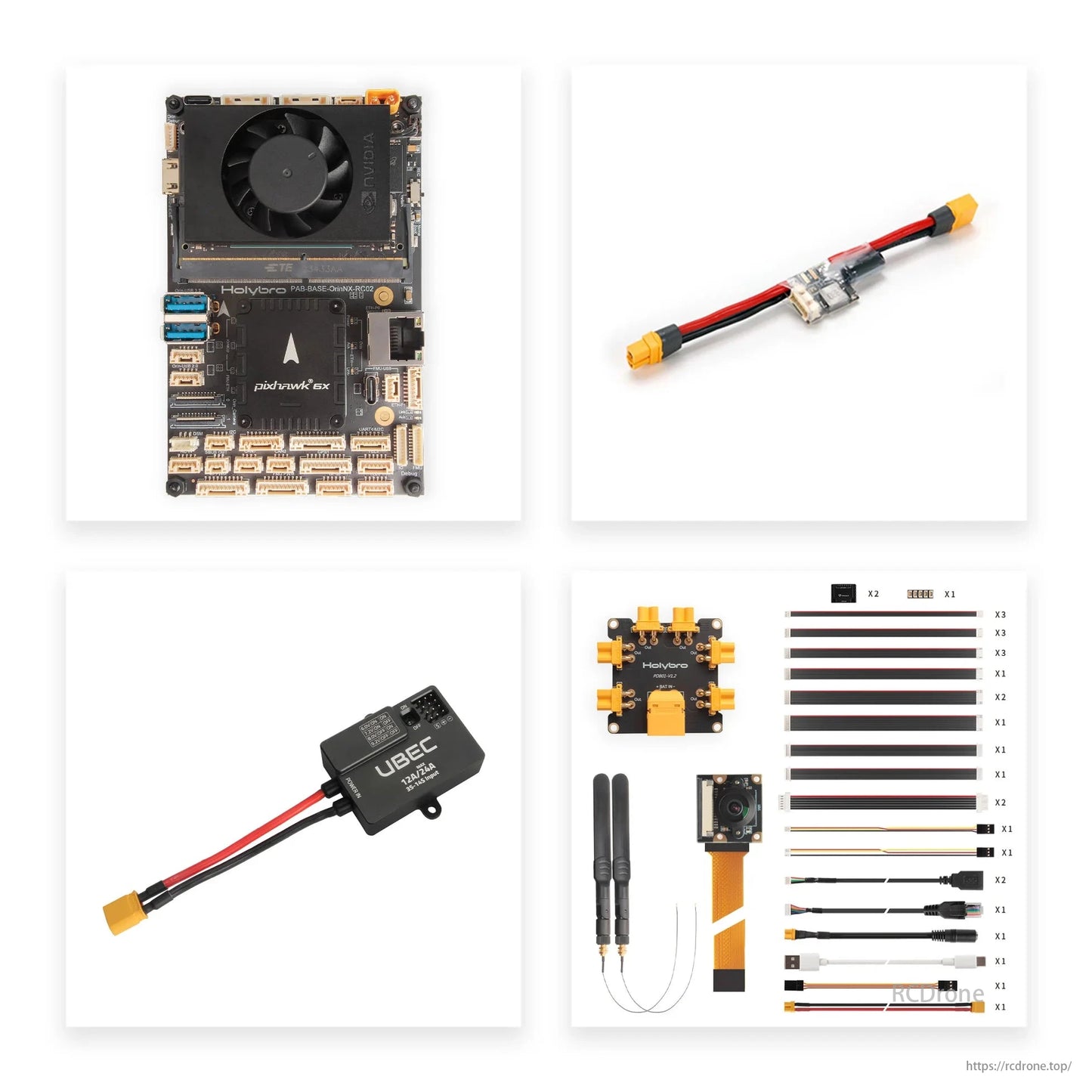
Paket İçeriği
Pixhawk 6X Paketi
-
Pixhawk 6X (ICM-45686) Uçuş Kontrol Modülü
-
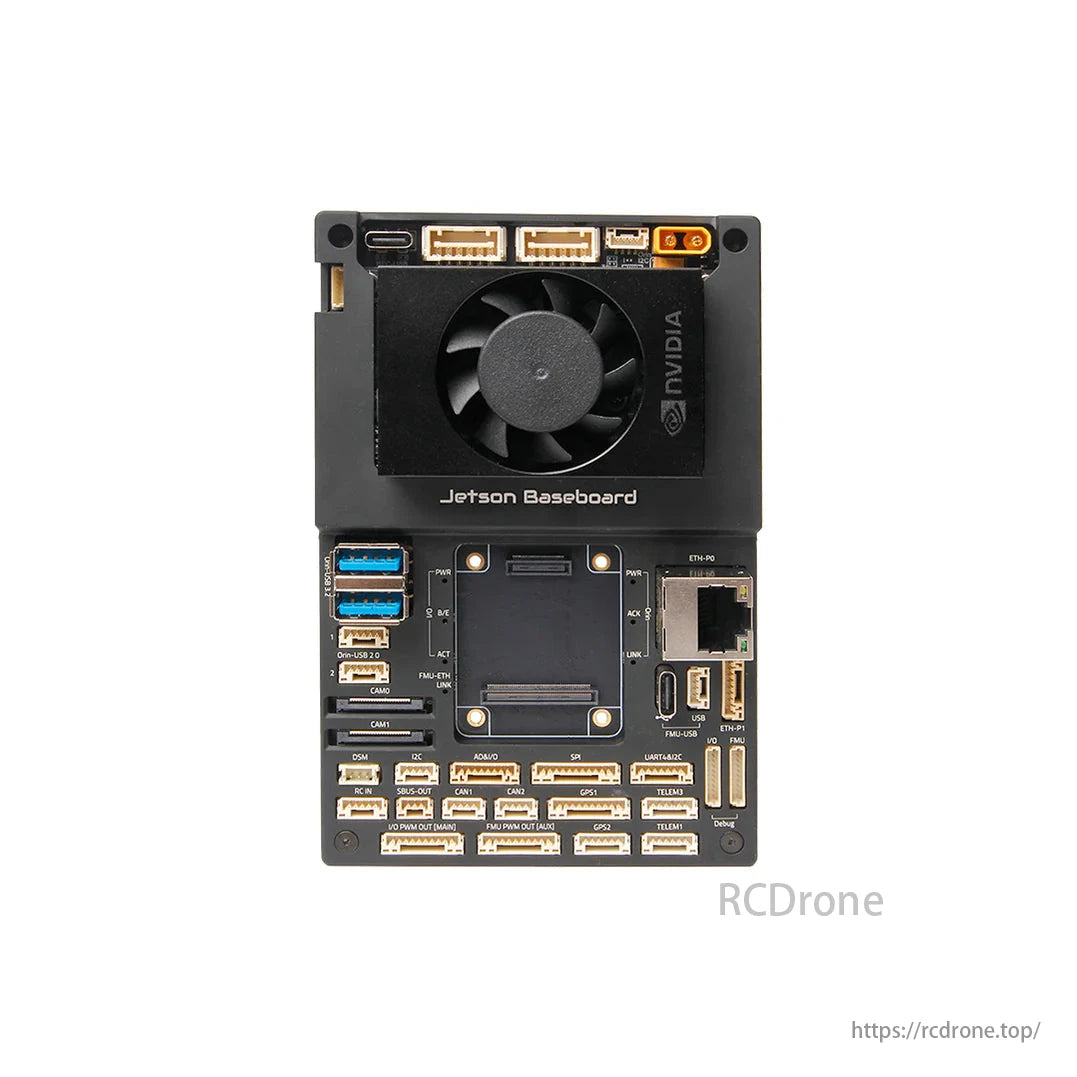
Pixhawk Jetson Orin Taban Tahtası
-
Nvidia Orin NX (16 GB RAM) / Orin Nano (4 GB RAM) Soğutucu ve Fan ile
-
SSD: Samsung PM9B1 PCIe 4.0 NVMe 512GB
-
Wi-Fi & Bluetooth Modülü: Intel 8265NGW AC Çift Bant / Realtek RTL8B22CE
-
Kamera: IMX219-200
-
PM02D Güç Modülü
-
UBEC 12A (3-14S)
-
PDB Pano ve Kablo Seti
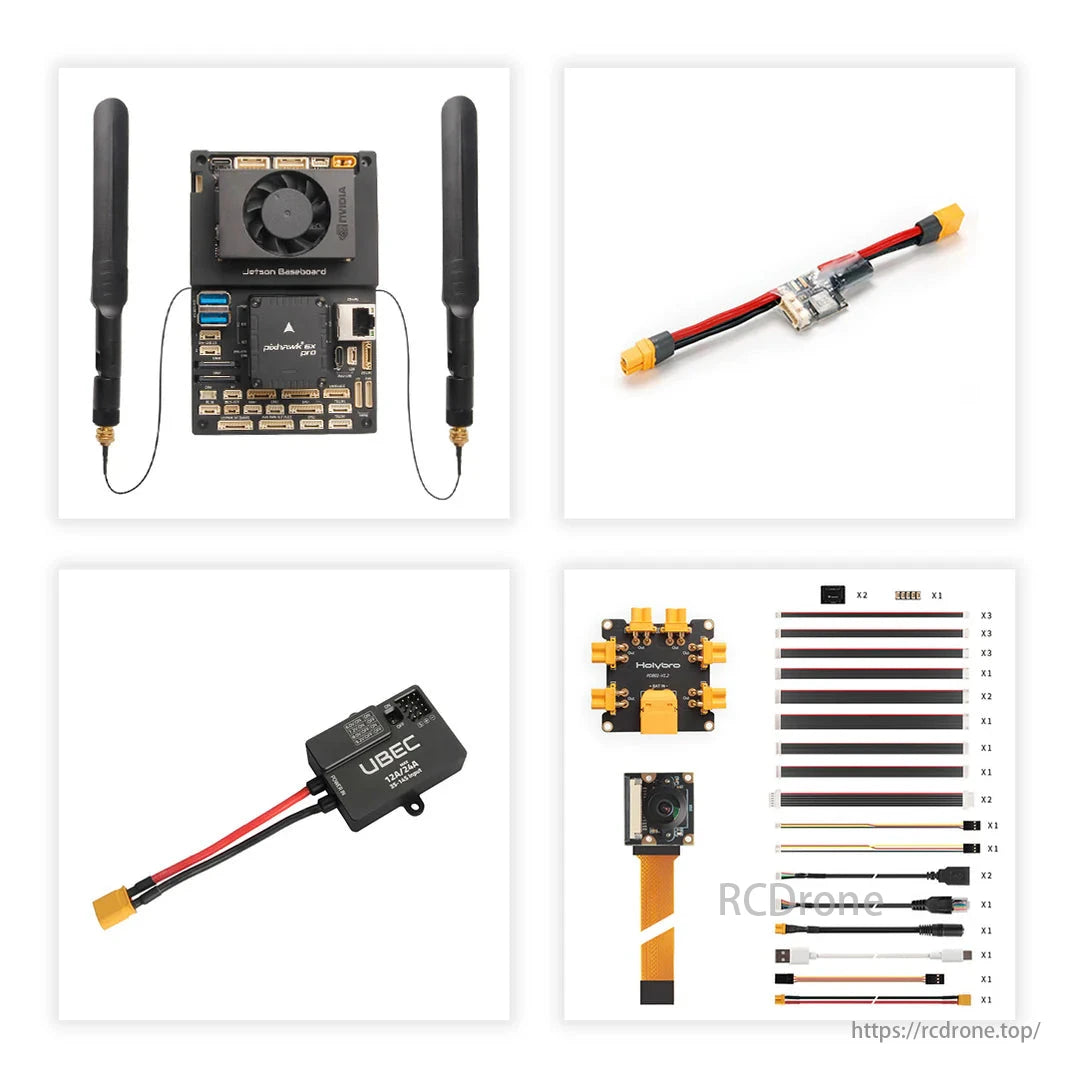
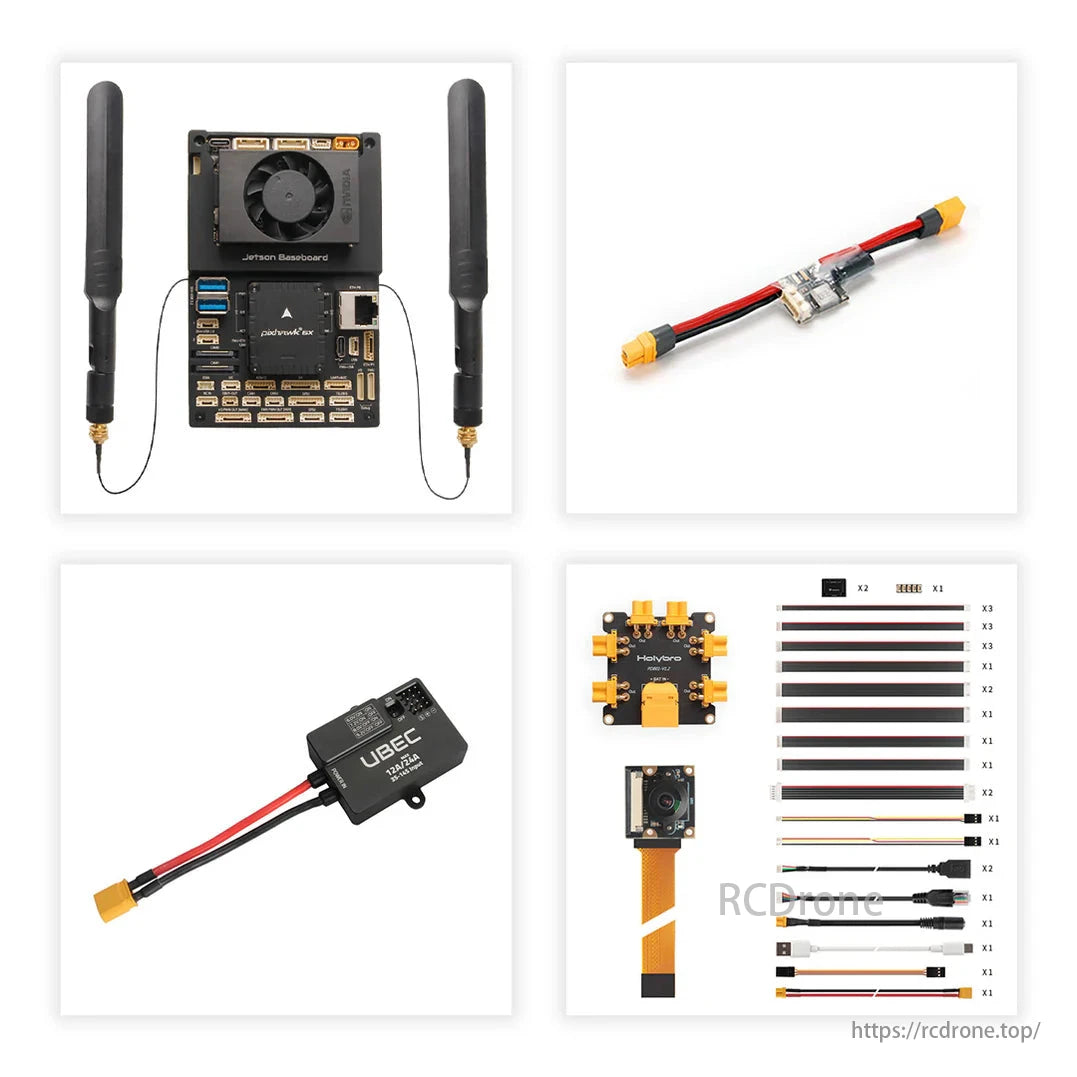
Pixhawk 6X Pro Paketi
-
Pixhawk 6X Pro Uçuş Kontrol Modülü
-
Pixhawk Jetson Orin Süpürgelik (Kutusuz/Kutusuz)
-
Nvidia Orin NX (16 GB RAM) / Orin Nano (4 GB RAM) Soğutucu ve Fan ile
-
SSD, Wi-Fi/Bluetooth Modülü, Kamera, PM02D Güç Modülü, UBEC 12A, PDB Kartı, Kablo Seti
Sadece Jetson Kaide
-
Pixhawk Jetson Orin Süpürgelik (Kutusuz/Kutusuz)
-
Kablo Seti
Referans Bağlantıları
Jetson Orin için Varsayılan Oturum Açma Kimlik Bilgileri:
-
İD:
kutsal kardeş -
Şifre:
123
Detaylar




Pixhawk ve Nvidia Jetson tek kartta birleşti.

Nvidia jetson, otopilot sistemleri için rj45 konnektörü kullanılarak uart can ve ethernet anahtarıyla bağlandı
Pixhawk Otopilot Otobüsü (PAB) Açık Kaynak Spesifikasyonu

Jetson SoDIMM Konnektör Sistemi Tam Uyumlu: Jetson Orin NX/Nano

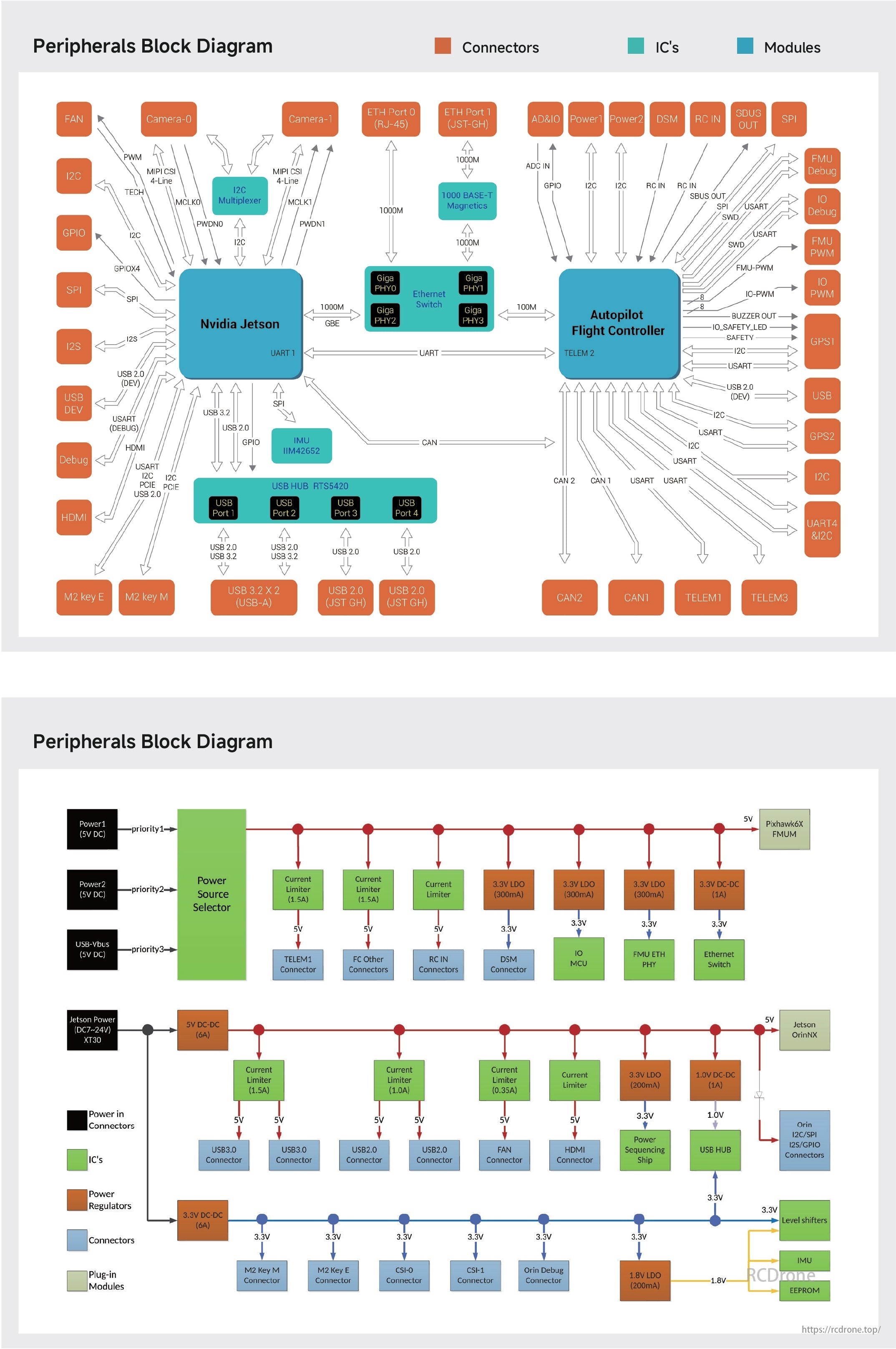
Resim, Nvidia Jetson ve Autopilot Uçuş Kontrolcüsü gibi bileşenleri içeren gömülü bir sistem için bir çevre birimleri blok diyagramını tasvir ediyor. Çeşitli konektörler, IC'ler ve USB portları, Ethernet anahtarları ve güç düzenleyicileri gibi modülleri içeriyor ve bunların birbiriyle olan bağlantılarını ve veri akışını gösteriyor.
Referans Kablolama Şeması

İki diyagram, bir batarya kullanan bir Jetson modülü için güç dağıtım sistemlerini göstermektedir. Soldaki diyagram bir PM02D Güç Modülü ve bir Güç Dağıtım Panosu kullanırken, sağdaki diyagram 4S'den büyük bataryalar için bir Harici UBEC içerir.Her iki kurulum da Jetson ve Pixhawk Power için uygun voltaj regülasyonunu sağlar.
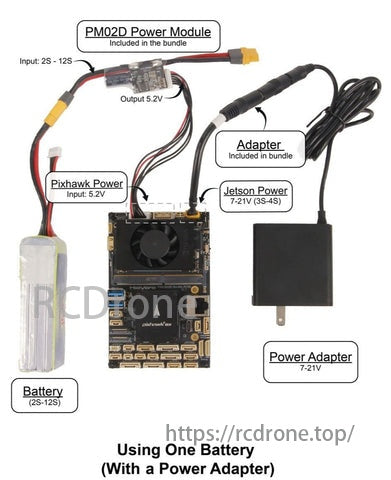
PM02D Güç Modülü, 7-21V giriş için bir güç adaptörü kullanarak bir pili Pixhawk ve Jetson'a bağlar.
Related Collections