Holybro X500 v2 PX4 Geliştirme Kiti - Holybro Pixhawk 6C / 6X, M8N GPS, SiK Telemetri Radyosu, Endüstriyel Drone ile Karbon Fiber Drone Kiti
Holybro X500 v2 PX4 Geliştirme Kiti - Holybro Pixhawk 6C / 6X, M8N GPS, SiK Telemetri Radyosu, Endüstriyel Drone ile Karbon Fiber Drone Kiti
HolyBro
Normal fiyat
$769.00 USD
Normal fiyat
İndirimli fiyat
$769.00 USD
Birim fiyat
/
Vergiler dahil.
Kargo, ödeme sayfasında hesaplanır.
Teslim alım stok durumu yüklenemedi
PX4 Geliştirme Kiti - X500 v2 en yeni Holybro Pixhawk 6C veya
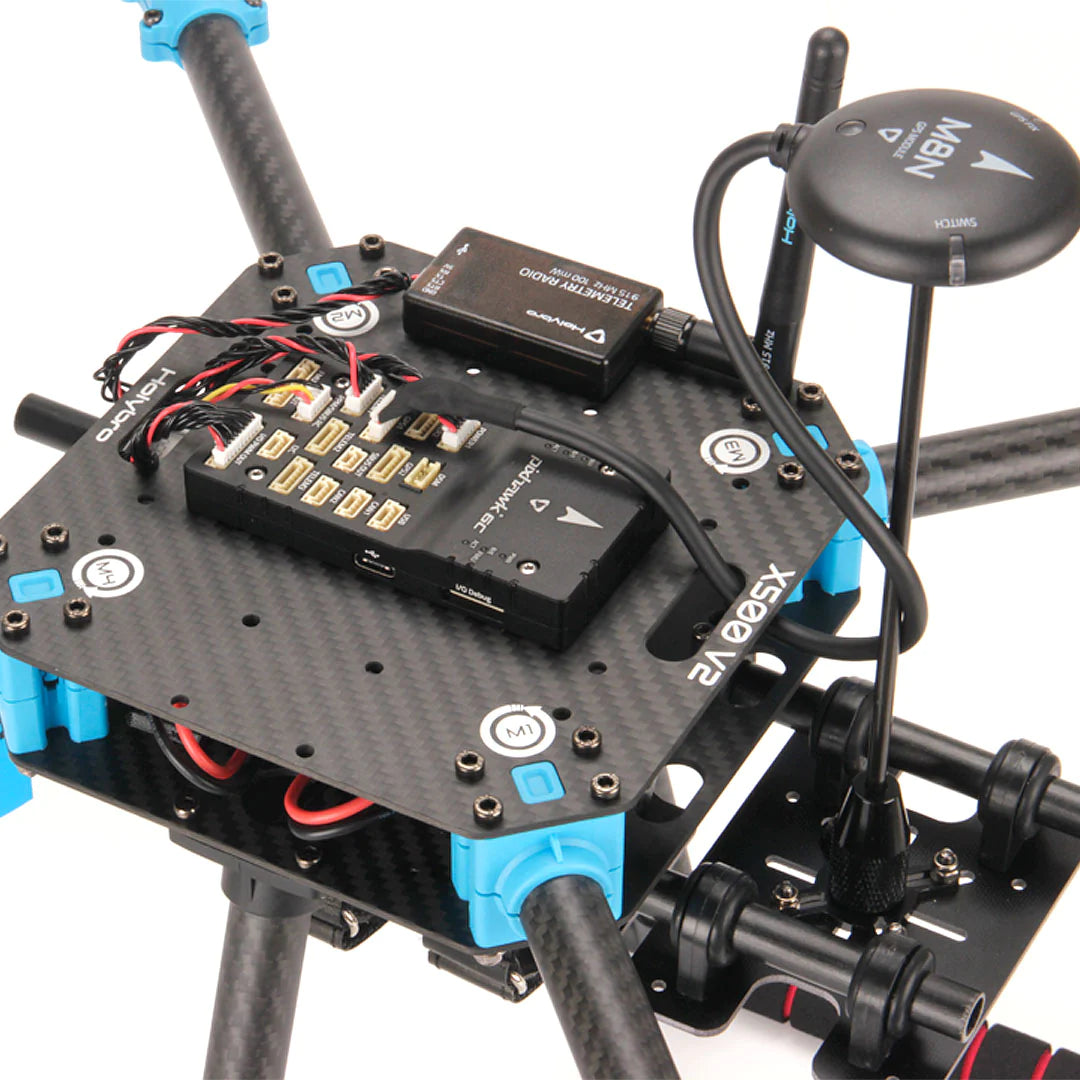
Çerçeve (X500 v2), üzerinde uygun çentikler bulunan yeni tasarlanmış fiberle güçlendirilmiş naylon konektörlerle desteklenen karbon fiber tüp kolları ile tamamen karbon fiber dimi kumaştan yapılmıştır. hem motor hem de gövde tarafı, çok daha kolay ve basit bir kurulum sağlar. İniş takımı, kalınlaştırılmış ve güçlendirilmiş konektörlere sahip 16 mm ve 10 mm çaplı karbon fiber tüplerden oluşur.
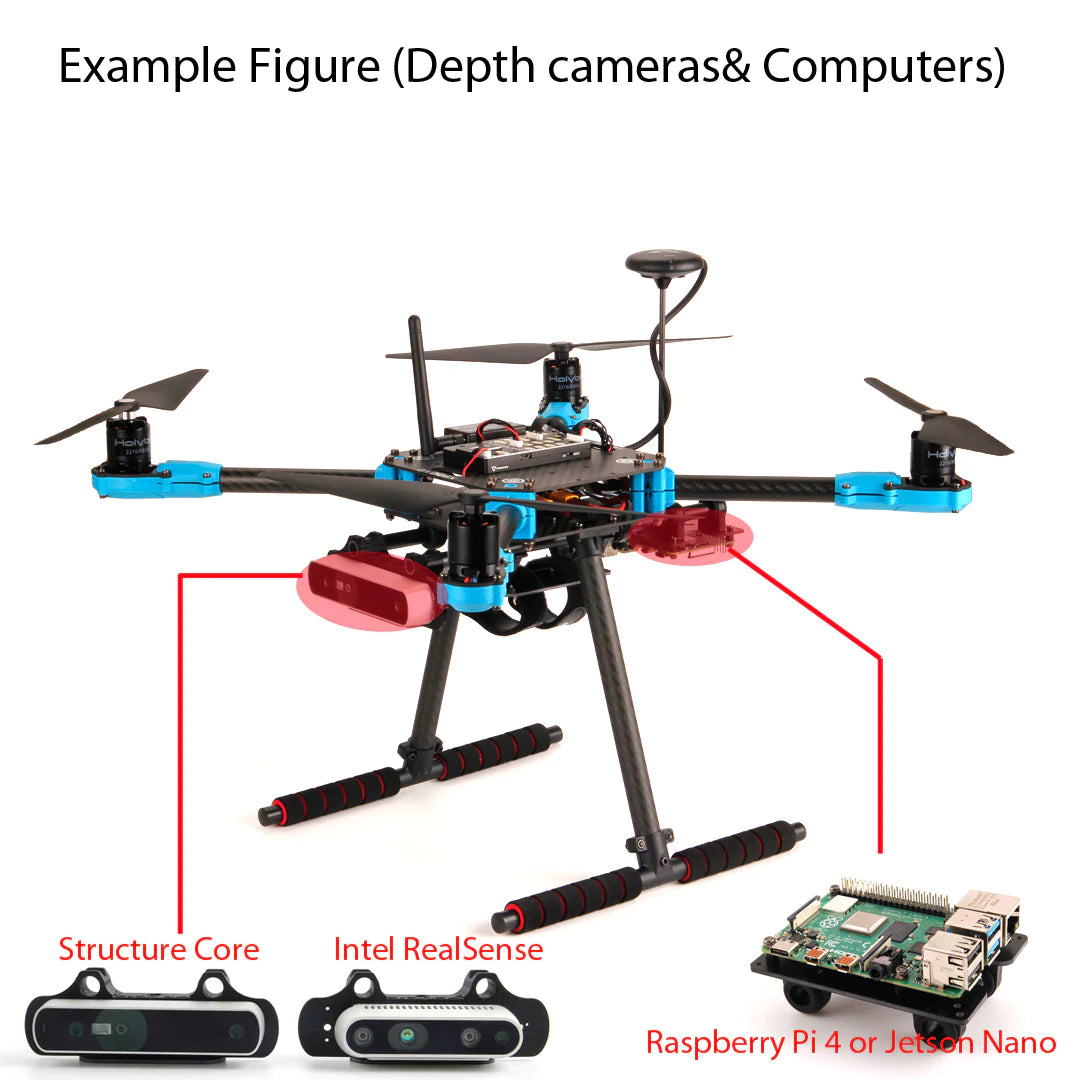
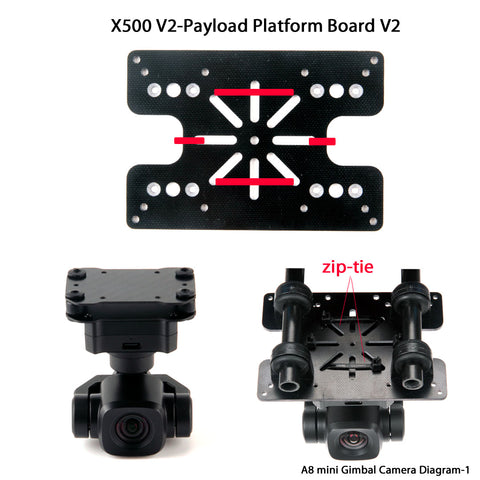
Platform panosunda artık GPS ve Raspberry Pi 4 ve Jetson Nano gibi popüler yardımcı bilgisayarlar için montaj delikleri bulunmaktadır. Intel RealSense serisi ve Yapı Çekirdek Derinlik Kameraları gibi çeşitli derinlik kameraları için isteğe bağlı Derinlik Kamerası Montajı (ayrı olarak satın alınır) mevcuttur. Daha kolay erişim sağlamak için üst ve alt karbon fiber plakalar arasındaki boşluk artırıldı. Ayarlanabilir akü montaj paneli, daha uzun uçuş süresi için daha büyük aküleri destekleyecek şekilde genişletildi. Ray montaj sistemi, çeşitli uygulamalar için çok sayıda kamera montaj parçasını ve gimbal'i almaya hazırdır. Kurulum için gerekli tüm araçlar pakette mevcuttur.
Not: Pixhawk 6C Uçuş kumandası hem PX4 hem de Ardupilot ile uyumludur ancak PX4 açık kaynaklı Autopilot donanım yazılımıyla birlikte gönderilir.
Özellik:
- Tamamen yeni Pixhawk 6C veya Pixhawk 6X Uçuş Kontrol Cihazı M10 GPS Modülü ve Tak ve Çalıştır SiK Telemetri Radyosu
- Minimum montaj süresine (~30 dakika) sahip yeni çerçeve tasarımı, Lehimleme gerektirmez
- Kolay ve basit kurulum sağlayan, fiberle güçlendirilmiş naylon konektörlere sahip Karbon Fiber çerçeve
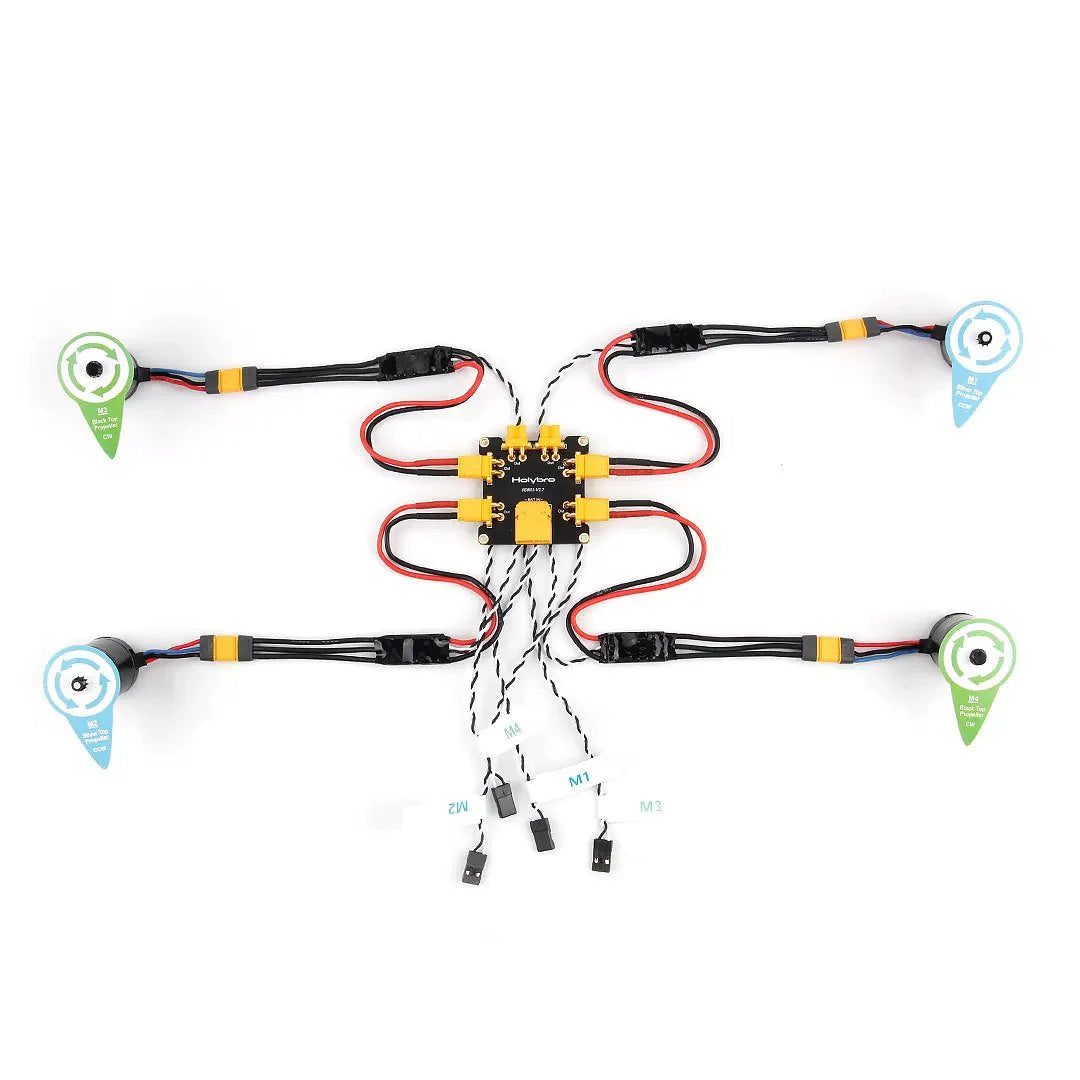
- PDB için basit XT30 güç fişlerine sahip önceden kurulmuş motorlar ve ESC'ler
- XT60 ve XT30 fişli güç dağıtım kartı (PDB)
- Raspberry Pi ve Nvidia Jetson Nano gibi yardımcı bilgisayarlara yönelik montaj
- Intel RealSense ve Structure Core için isteğe bağlı derinlik kamera montajı
Not:
- Pixhawk 6X sürümü artık PM02D-HV (Yüksek Gerilim) sürümüyle birlikte geliyor. PX4'te, bunu etkinleştirmek için SENS_EN_INA228 ayarını yapmanız gerekir. Bu HV sürümü yalnızca ardupilot 4.4 ve sonraki sürümlerde desteklenir. Kurulum Kılavuzunu burada bulabilirsiniz.
-
M10 GPS için Donanım Yazılımı Desteği: PX4 1.14 ve ArduPilot 4.3 veya daha yenisi gereklidir.
PX4 Geliştirme Seti - X500 v2 İçeriği:
- Otomatik pilot Uçuş kumandası: Pixhawk 6C (Plastik Kasa) & PM02 V3 veya Pixhawk 6X (Standart Taban) & PM02D
- M10 GPS Modülü
- SiK Telemetri Radyosu V3 433/915MHz
- X500 V2 Çerçeve Kiti (SKU30120)
-
Önceden Yüklenmiş Öğeler:
- Motorlar - Holybro 2216 KV920 Motor (4 adet) XT30 Fişli (Motor Teknik Özelliklerini burada bulabilirsiniz)
- ESC'ler - BLHeli S ESC 20A (4 adet) XT30 Fişli - 4S Pil ile Uyumlu
- 1045 Pervaneler (6 adet)
- Güç Dağıtım Kartı (pil için XT60 fişi ve ESC'ler ve çevre birimleri için XT30 fişi)
-
Diğer İsteğe Bağlı Öğeler (Ayrı Satılır)
- RadioMaster TX16S RC Kontrol Cihazı
- RadioMaster R81 Alıcı
- Derinlik Kamera Bağlantısı
X500 V2 Çerçeve Kiti Ayrıntıları (SKU30120):
- Gövde - Tam Karbon Fiber Üst ve Alt plaka (144 x 144 mm, 2 mm kalınlık)
- Kol - Yeni tasarlanmış fiberle güçlendirilmiş naylon konektörlere sahip, yüksek mukavemetli ve ultra hafif 16 mm karbon fiber tüpler
- İniş takımı - 16 mm ve 10 mm çapında, güçlendirilmiş ve geliştirilmiş plastik T bağlantı konnektörlerine sahip karbon fiber tüpler.
- Platform kartı - GPS ve Raspberry Pi 4 ve Jetson Nano gibi popüler yardımcı bilgisayarlar için montaj deliklerine sahip
- Çift 10mm Ø çubuk x 250 mm uzunluğunda ray montaj sistemi
- İki Pil Kayışıyla pil yuvası
- Kurulum için el aletleri
Mekanik Özellikler:
- Dingil mesafesi: 500 mm
- Motor montaj düzeni: 16x16mm
- Çerçeve Gövdesi: 144x144mm, 2mm kalınlık
- İniş takımı yüksekliği: 215mm
- Üst ve alt plakalar arasındaki boşluk: 28 mm
- Ağırlık: 610g
- Uçuş süresi: ~18 dakika, ek yük olmadan havada asılı kalma. 5000mAh Pil ile test edilmiştir.
- Yük Kapasitesi: 1500g (Pilsiz, %70 Gaz)
- Pil Önerisi: 4S 3000-5000mAh 20C+, XT60 Lipo Pil ile (Dahil Değil)

X500 v2 Montaj Kılavuzu
Referans:
Motor özellikleri
3D Yazdırma:
Holybro_X500_V2_3D BaskıKurulum Kılavuzu:
idorobotik Makalesi
PX4 Kurulum Kılavuzu
Ardupilot Kurulum Kılavuzu
Bazı İpuçları:
Related Collections