



LKMTECH MF4005-V2 Motor 12V RS485/CAN 18bit Manyetik Enkoder DF40V2 Sürücü Seçeneği Robotik için
LKMTECH MF4005-V2 Motor 12V RS485/CAN 18bit Manyetik Enkoder DF40V2 Sürücü Seçeneği Robotik için
LKMTECH
Teslim alım stok durumu yüklenemedi
Genel Bakış
LKMTECH MF4005-V2, hafif tasarım, yüksek kontrol hassasiyeti ve yüksek tork çıkışı gerektiren entegre mekatronik uygulamalar için tasarlanmış bir motordur. MF4005 V2 güncellemesi şunları vurgulamaktadır: encoder çözünürlüğü 14-bit'ten 18-bit'e yükseltilmiştir, cogging tork optimizasyonu, PWM giriş desteği ve birden fazla baud hızı seçeneği ile CAN/RS485 iletişimi.
Temel Özellikler
- Entegre tasarım: mekanik-elektrik entegrasyonu
- Hafif tasarım: havacılık alüminyum alaşımlarının düzleştirilmiş tasarımı
- Yüksek kontrol hassasiyeti: manyetik enkoder (MF4005 V2 güncellemesi 14-bit'ten 18-bit'e yükseltildi)
- Yüksek tork çıkışı: yüksek performanslı RbFeB permanant mıknatıs
- PWM girişini destekler
- İletişim: CAN veya RS485
- Sürüş fonksiyonları: tork modu, hız modu ve konum modu arasında geçiş yapabilir
- Ana kontrol: 32-bit Cortex-M4 ARM yüksek verimlilikte işlemci (sürücü)
- Stator sıcaklığının gerçek zamanlı izlenmesi (sürücü)
- Sürücü güç aşaması: düşük iç direnç ve yüksek akımla tam köprü devresi
- 18-bit tek dönüş mutlak değer manyetik enkoder (sürücü özellik metni); bir kalibrasyon, sıfır pozisyonu asla kaybolmaz
- Motor inşaat notları: dış rotor; sabit mıknatıs çok aşamalı yay tasarımı; daha küçük hava aralığı; radyal mıknatıslaşma; 0.2 mm silikon çelik levha; sınıf H yalıtımlı emaye tel; SH sınıfı NdFeB
- OEM/ODM hizmeti (bir ürün spesifikasyonu değildir)
- Parametre yazılımı: parametreleri ayarlamak, test etmek ve güncellemek için sağlanan program yazılımı; PC, MCU, PLC, ICP ve RPi gibi açık kaynak geliştirmeyi destekler
Uygulama Senaryoları
- İnsansı Robotlar
- Robot Kolları
- Ekoskeletonlar
- Dört Ayaklı Robotlar
- AGV Araçları
- ARU Robotları
- Kamera PTZ
- Lazer Lidar
- Güç İstasyonu Denetim Robotu
- Endüstriyel Denetim
Spesifikasyonlar
Motor modeli: MF4005-V2
| Parametre | Değer (25 tur) | Değer (40 tur) |
|---|---|---|
| Ürün Adı | MF4005-V2 | MF4005-V2 |
| Dönüşler | 25 | 40 |
| Nominal Voltaj | 12V | 12V |
| Maksimum Hız | 2390RPM | 1300RPM |
| Nominal Tork | 0.07 N.m | 0.06 N.m |
| Nominal Hız | 1600RPM | 700RPM |
| Nominal Akım | 1.44A | 0.81A |
| Maksimum Güç | 14W | 4.6W |
| Maksimum Tork | 0.25 N.m | 0.12 N.m |
| Hız Sabiti | 133 rpm/V | 58 rpm/V |
| Tork Sabiti | 0.05 N.m/A | 0.07 N.m/A |
| Sargı Tipi | Y | Y |
| Aşama Direnci | 1.9Ω | 4.3Ω |
| Aşama Endüktansı | 0.5mH | 1.2mH |
| Motor Kutup Sayısı | 26 | 26 |
| Rotor atalet momenti | 56 gcm² | 56 gcm² |
| Motor Sıcaklığı | EVET | EVET |
| Rulman Nominal Yükü | 140N | 140N |
| Motor Ağırlığı | 65g | 65g |
| Tavsiye Edilen Sürücü | DF40V2 | DF40V2 |
| Sürücü giriş Voltajı | 7.4-32V | 7.4-32V |
| İletişim | RS485 VEYA CAN | RS485 VEYA CAN |
| İletişim Frekansı | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| Encoder | 18bit Manyetik Encoder | 18bit Manyetik Encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Kontrol Modu | Moment Döngüsü (24KHz) / Hız Döngüsü (8KHz) / Pozisyon Döngüsü (8KHz) | Moment Döngüsü (24KHz) / Hız Döngüsü (8KHz) / Pozisyon Döngüsü (8KHz) |
| İvme eğrisi | Trapezoidal ivme | Trapezoid ivme |
Arayüz Tanımı
ID anahtarı: ID ANAHTARI
| Arayüz | Not |
|---|---|
| A/L | RS485-A veya CAN-L |
| B/H | RS485-B veya CAN-H |
| V+ | Pozitif Güç Kaynağı |
| V+ | Pozitif Güç Kaynağı |
| V- | Negatif Güç Kaynağı |
| V- | Negatif Güç Kaynağı |
| T | UART Verici |
| R | UART Alıcı |
| G | Signal GND |
Ön satış veya entegrasyon desteği için (RS485/CAN kurulumu, baud hızı seçimi ve CAD dosyaları), iletişime geçin [email protected] or ziyaret edin https://rcdrone.top/.
Kılavuzlar / Dosyalar
Ayrıntılar

MF4005‑V2, kompakt robotik yapılar için motor, enkoder ve sürücü özelliklerini entegre eder; geliştirilmiş 18-bit manyetik enkoder ve CAN/RS485 iletişim seçenekleri ile.
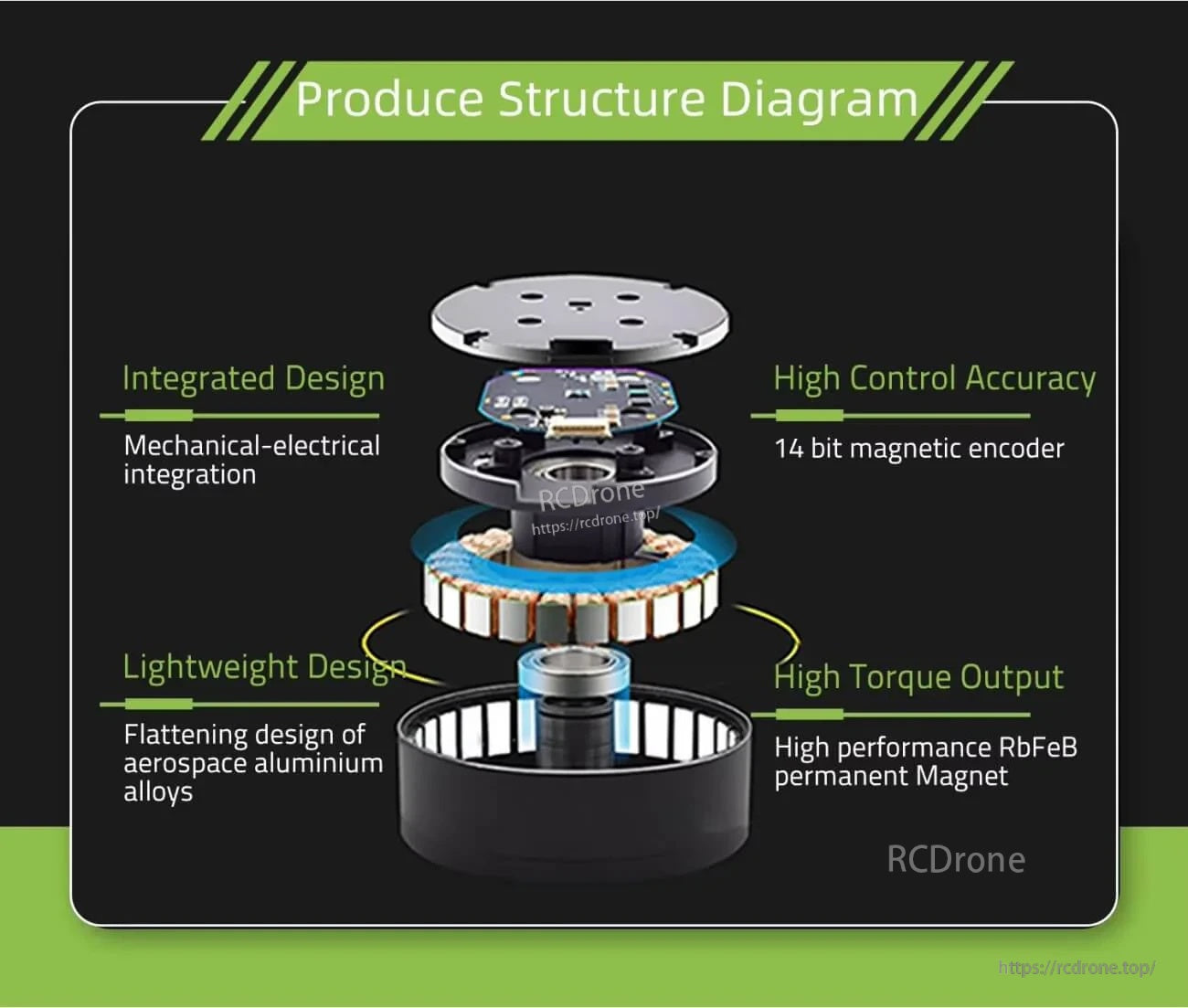
Entegre, hafif bir yapı, sürücü elektroniğini motor montajı ile birleştirerek hassas kontrol ve yüksek tork çıkışını destekler.
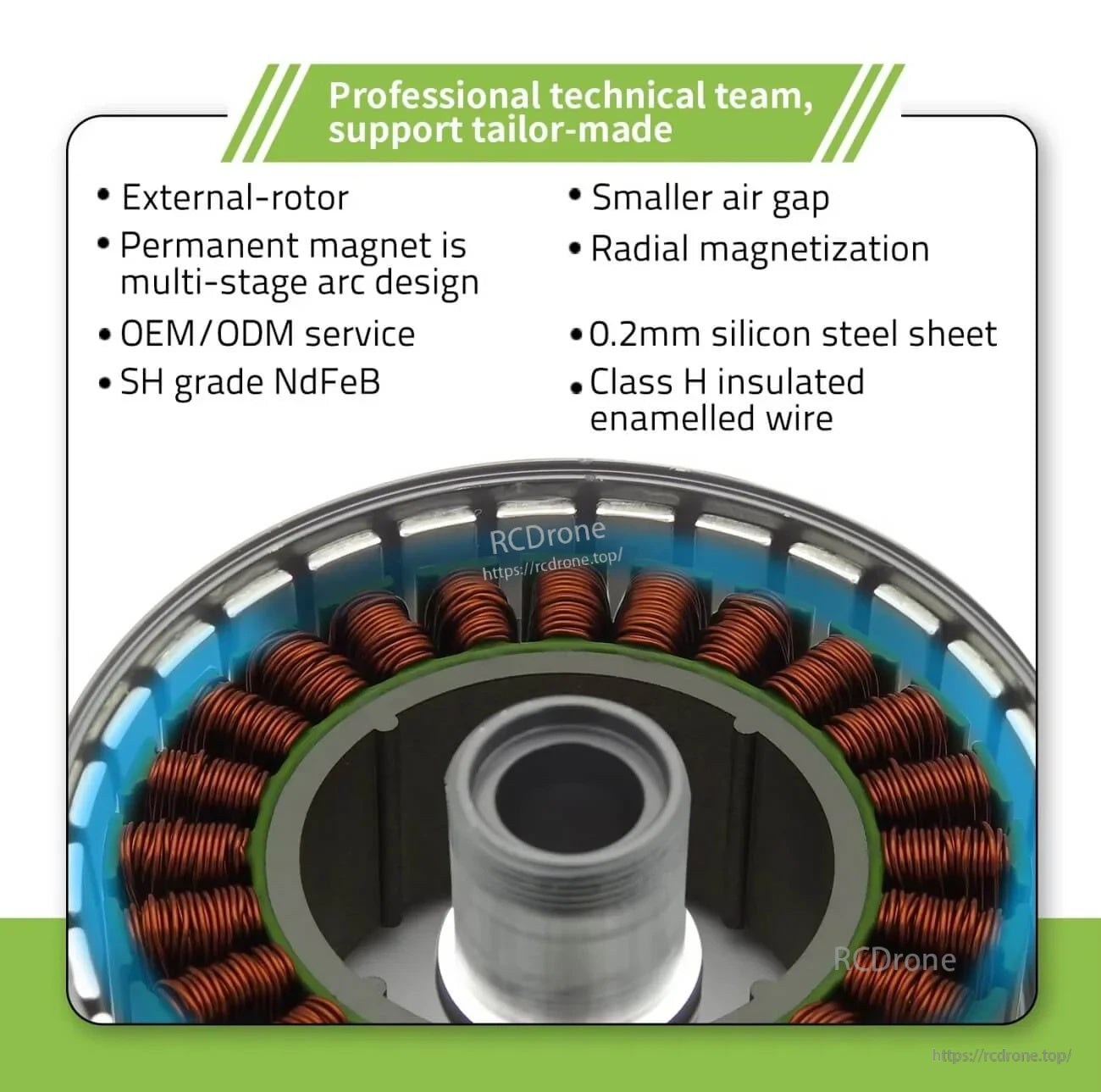
Dış rotor tasarımı ve yoğun sargı düzeni, robotik eklemler ve aktüatörler için boyut, tepki süresi ve tork dengesini sağlamaya yardımcı olur.
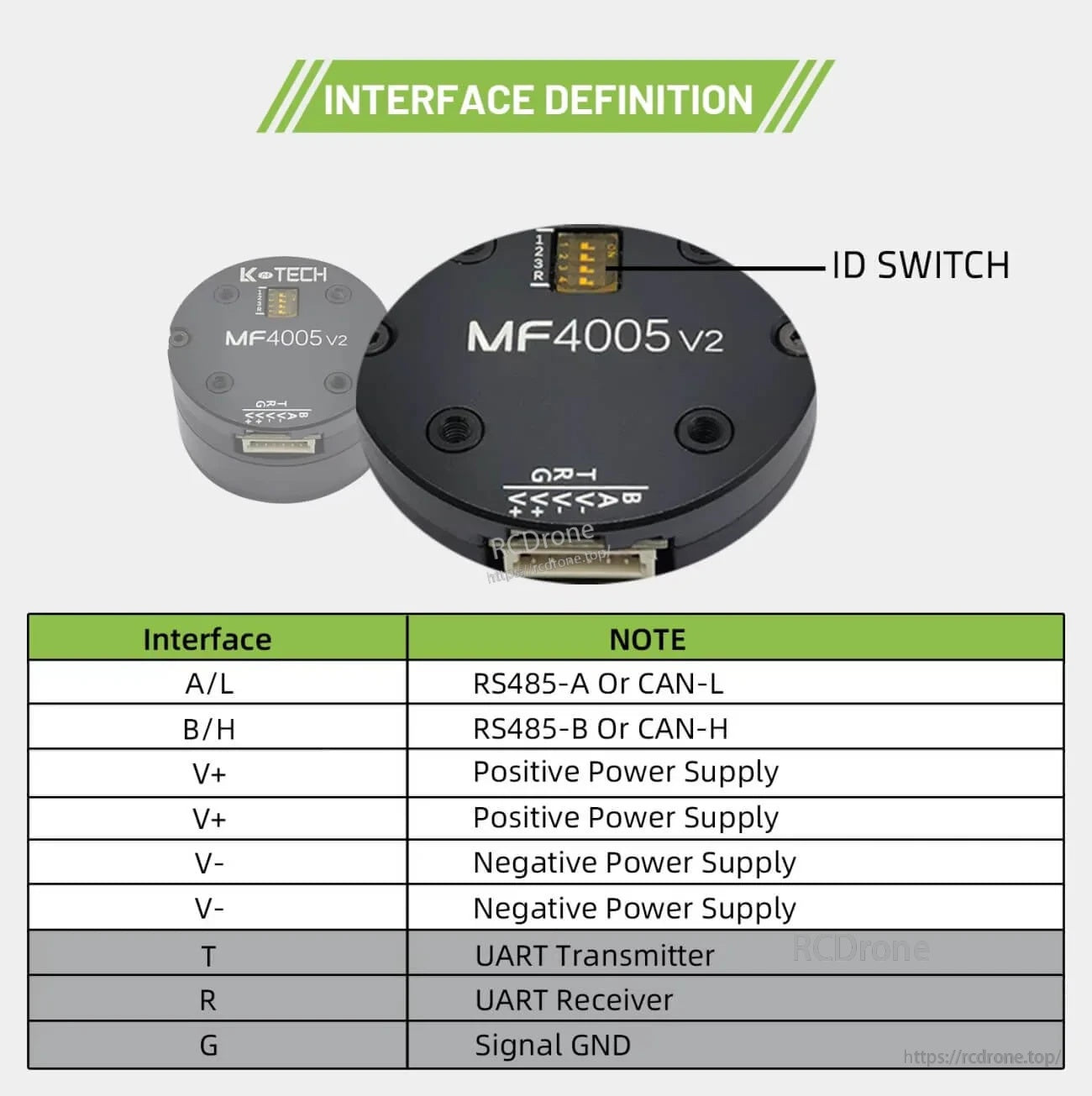
Bağlantı, RS485 veya CAN kullanan bus kurulumları için açıkça etiketlenmiş bir konektör ve ID anahtarı ile basitleştirilmiştir.
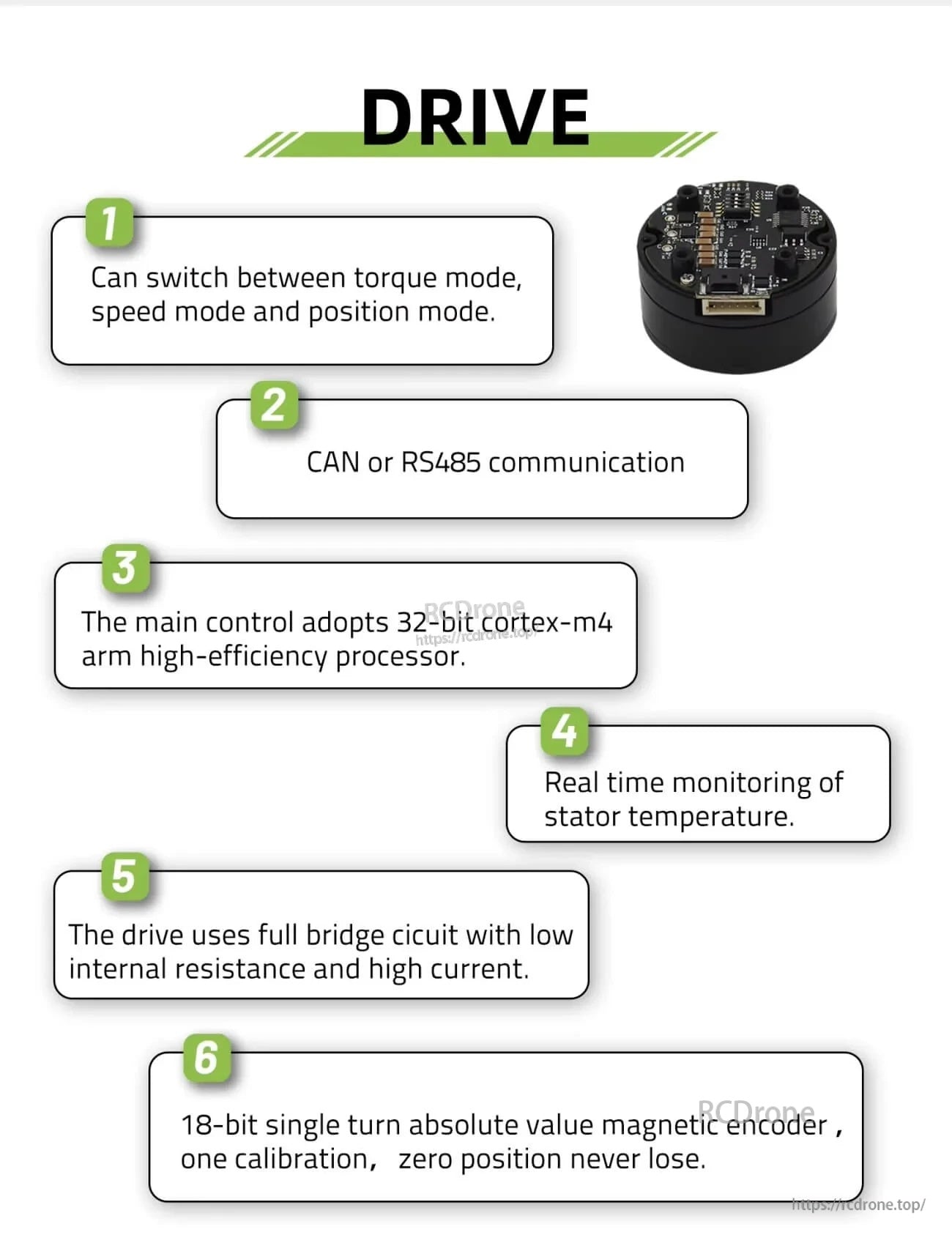
Sürücü yetenekleri, seçilebilir tork, hız ve konum modları ile birlikte, CAN veya RS485 üzerinden gerçek zamanlı stator sıcaklık izleme içerir.
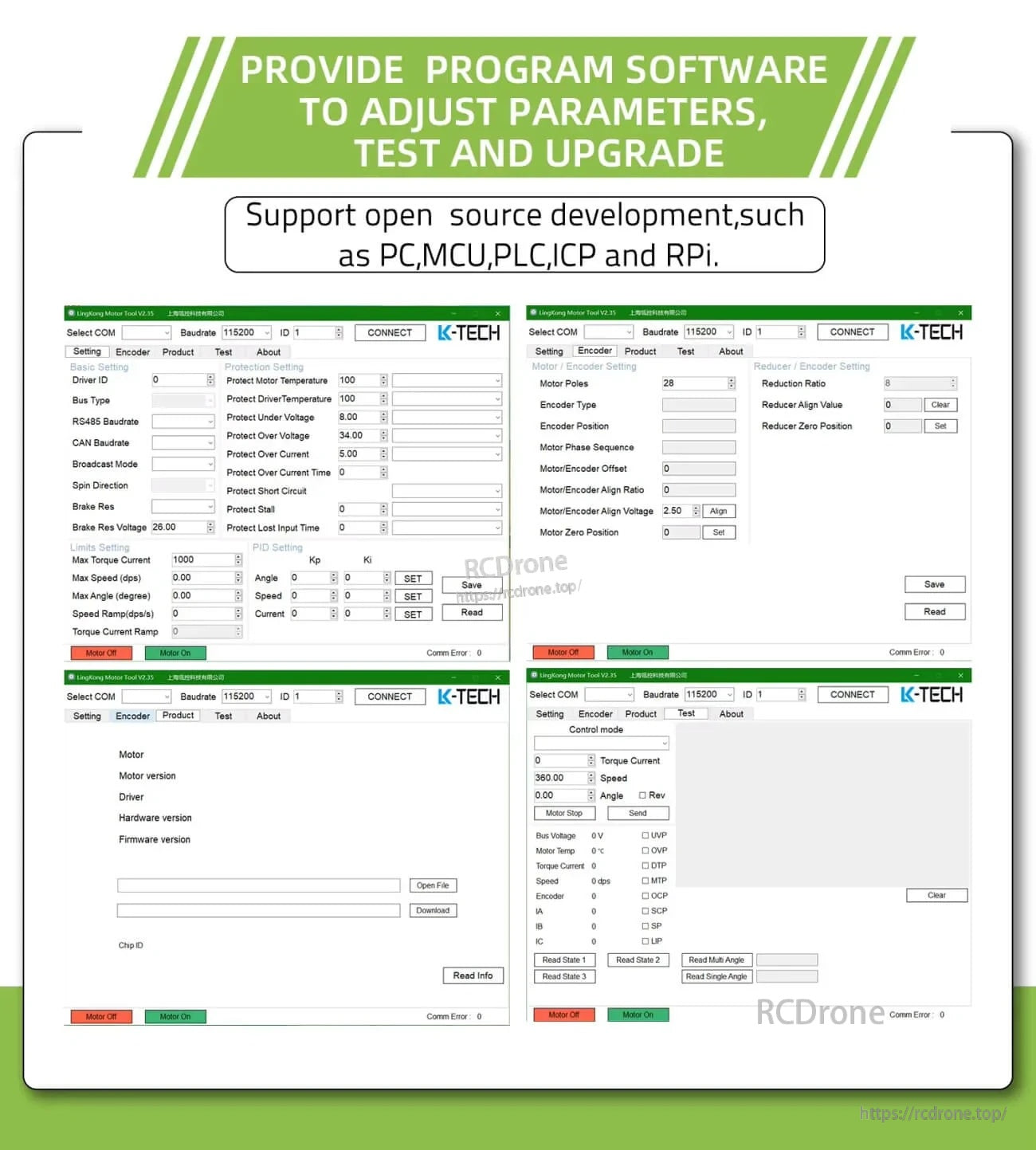
PC yazılım desteği, parametre ayarlama, test etme ve yükseltmeler konusunda yardımcı olur ve geliştirme iş akışlarına uygun seçenekler sunar.
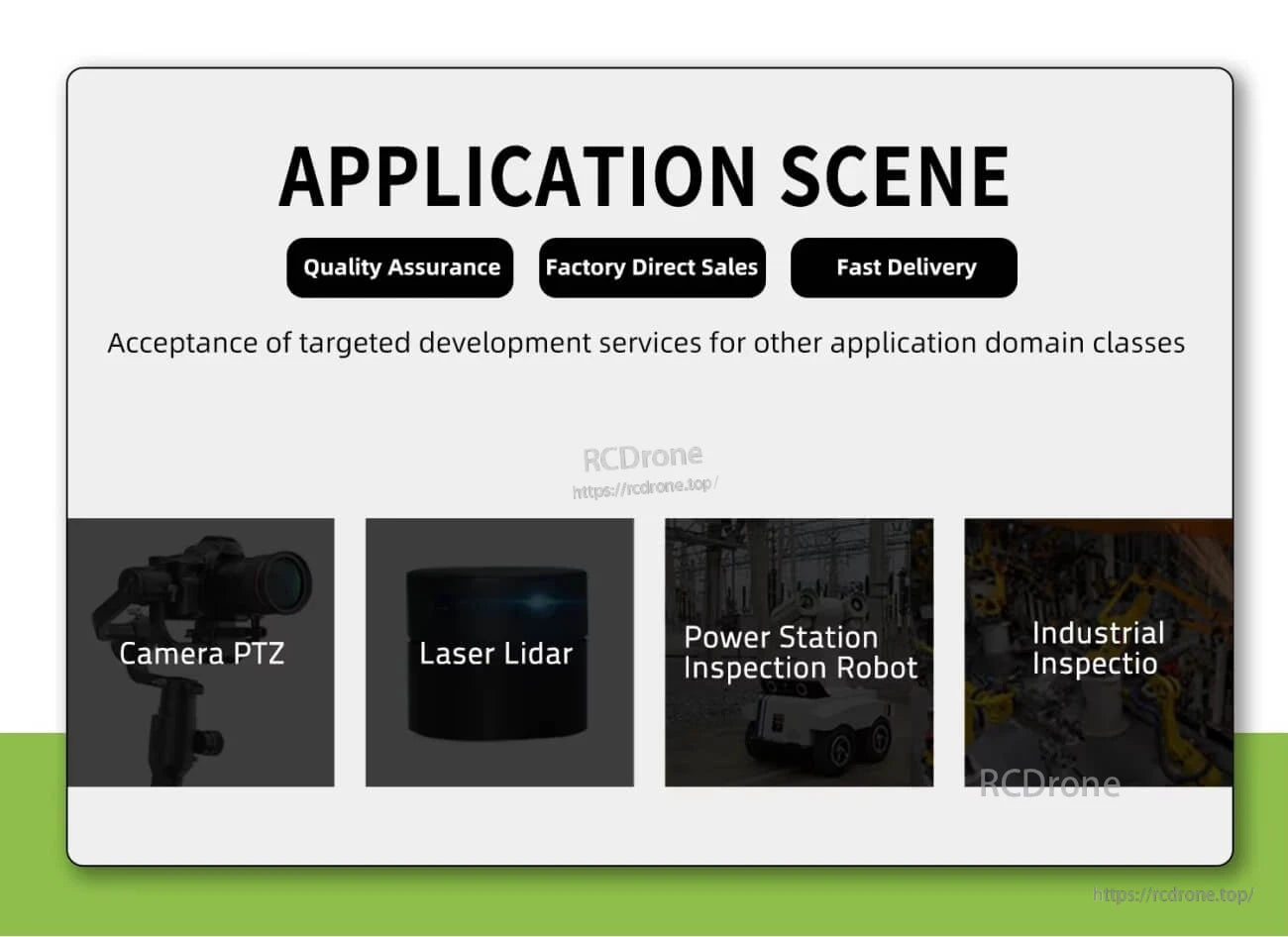
Yaygın uygulama alanları arasında endüstriyel ortamlarda kullanılan PTZ kamera başlıkları, lidar sistemleri ve muayene robotları bulunmaktadır.
Related Collections



