




LKMTECH MG4005E-i10-V3 Planet Dişli Motoru, 24V 1:10 PG4210, RS485/CAN Çift Enkoder
LKMTECH MG4005E-i10-V3 Planet Dişli Motoru, 24V 1:10 PG4210, RS485/CAN Çift Enkoder
LKMTECH
Teslim alım stok durumu yüklenemedi
Genel Bakış
LKMTECH MG4005E-i10-V3 Motor, kompakt dişli, kapalı döngü geri bildirim ve veri yolu iletişimi gerektiren robotik hareket ve otomasyon eklemleri için tasarlanmış bir gezegen dişli motorudur. Hassas kontrol için bir gezegen dişli redüktörü (PG4210, 1:10) ve çift mutlak manyetik enkoder (motor tarafı + redüktör tarafı) entegre eder.
Temel Özellikler
- Gezegen dişli motoru: yüksek güç, büyük tork ve yüksek hassasiyet
- Fırçasız motor + yüksek hassasiyetli gezegen dişli redüktörü
- FOC kontrolü (sürücü/gerekli sürücü)
- Çift encoder: 18-bit tek dönüş mutlak manyetik encoder (motor tarafı) + 14-bit tek dönüş mutlak manyetik encoder (redüktör tarafı)
- Redüktör tarafındaki encoder, tek dönüşün mutlak değerini destekler ve güç kapandığında sıfır noktasını hatırlar
- RS485 veya CAN bus iletişimi
- PC yazılımı, test ve firmware güncellemesi aracılığıyla parametre ayarını destekler
- Açık kaynak geliştirme platformlarını destekler: PC, MCU, PLC, endüstriyel bilgisayar ve Raspberry Pi
- Birden fazla kontrol modu desteklenmektedir: Tork Modu, Hız Modu, Çok Dönüş Kontrol Modu, Tek Dönüş Pozisyon + Yön Modu, Artımlı Pozisyon Modu, Çok Dönüş Kontrol Modu (Hız Sınırı ile), Tek Dönüş Pozisyon + Yön Modu (Hız Sınırı ile), Artım Pozisyon Modu (Hız Sınırı ile)
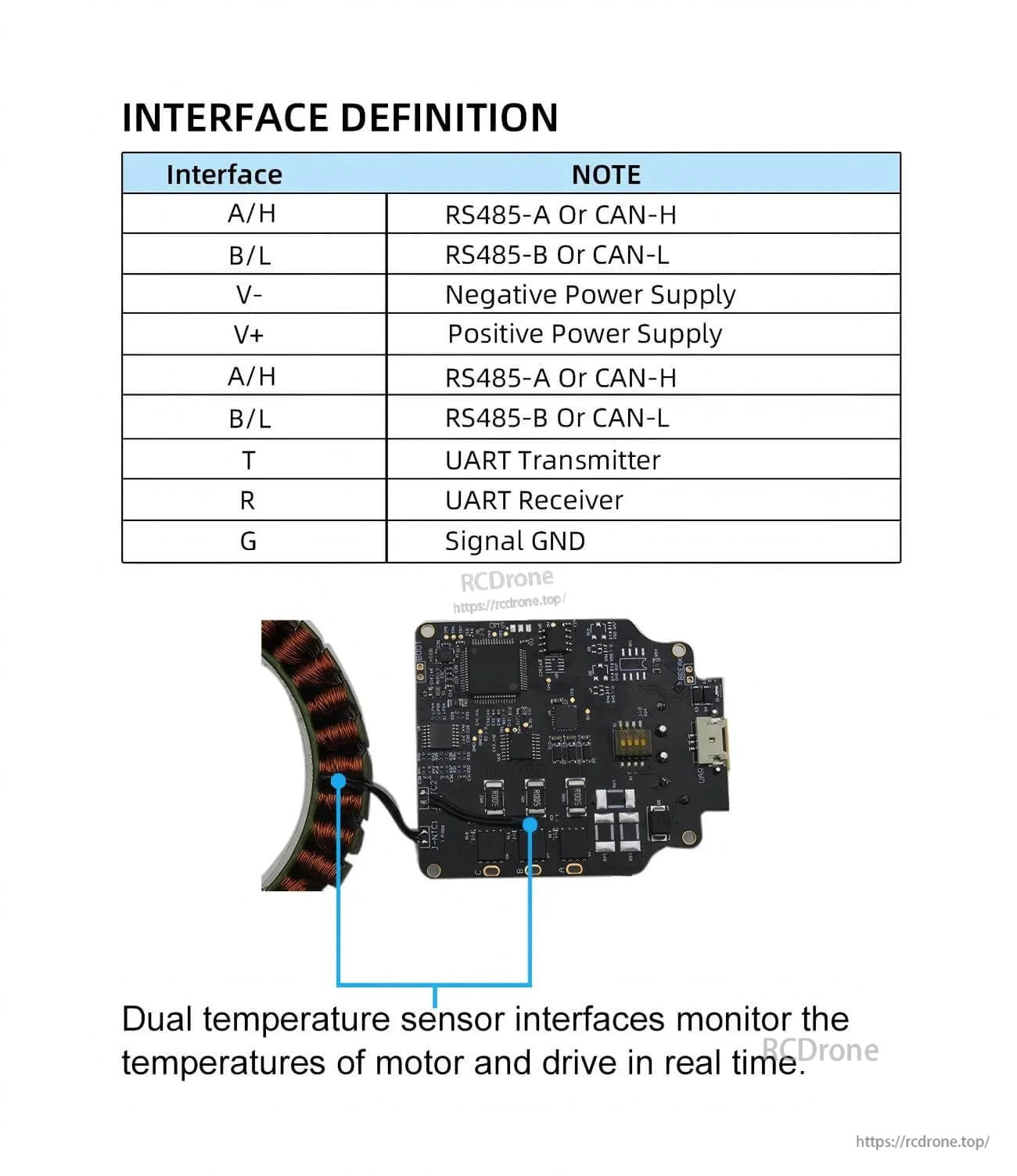
- Çift sıcaklık sensörü arayüzleri, motor ve sürücünün sıcaklıklarını gerçek zamanlı olarak izler
- Rezerve edilmiş fren fonksiyonu (Fren / Fren Serbest Bırakma)
- Liste halinde çoklu koruma fonksiyonları: UVP, OVP, DTP, MTP, OCP, SCP, MSP, LIP
Entegrasyon desteği ve ön satış onayı için https://rcdrone.top/ ile iletişime geçin veya [email protected] e-posta gönderin.
Özellikler
| Ürün Adı | MG4005E-i10-V3 |
| Nominal Voltaj | 24V |
| Maks. Hız | 320RPM |
| Nominal Tork | 1 N.m |
| Nominal Hız | 255RPM |
| Nominal Akım | 1.8A |
| Maks. Güç | 65W |
| Maks. Tork | 2.5 N.m |
| Hız sabiti | 106.3rpm/V |
| Tork Sabiti | 0.06 N.m/A |
| Dönüşler | 28 |
| Sargı Tipi | Y |
| Aşama Direnci | 1.4Ω |
| Aşama Endüktansı | 0.5mH |
| Motor Kutup Sayısı | 28 |
| Rotor atalet momenti | 140gcm² |
| Motor Sıcaklığı | Evet |
| Redüktör Tipi | PG4210 |
| Redüksiyon Oranı | 1:10 |
| Boşluk | ≤10 arcmin |
| Rulman Nominal Yükü | 1000N |
| Motor Ağırlığı | 183g |
| Tavsiye Edilen Sürücü | DG40E |
| Sürücü Giriş Voltajı | 7.4-32V |
| İletişim | RS485 veya CAN |
| İletişim Frekansı | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| Encoder | 18-bit (motor) + 14-bit (redüktör) manyetik encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M |
| Kontrol Modu | Moment Döngüsü (24KHz) / Hız Döngüsü (8KHz) / Pozisyon Döngüsü (4KHz) |
| İvme eğrisi | Trapezoidal ivme |
Arayüz Tanımı
| Arayüz | Not |
|---|---|
| A/H | RS485-A veya CAN-H |
| B/L | RS485-B veya CAN-L |
| V- | Negatif Güç Kaynağı |
| V+ | Pozitif Güç Kaynağı |
| A/H | RS485-A veya CAN-H |
| B/L | RS485-B veya CAN-L |
| T | UART Verici |
| R | UART Alıcı |
| G | Signal GND |
Uygulamalar
- İnsansı robotlar
- Robot kolları
- Ekoskeletonlar / giyilebilir robotlar
- Dört ayaklı robotlar / robot köpek
- AGV araçları / AGV araba
- ARU robotları
Kılavuzlar / Dosyalar
Detaylar

MG4005E-i10-V3, robotik eklemler ve otomasyon eksenleri için kompakt bir formda fırçasız motor ile bir planetar redüktörü birleştirir.

Çift tek dönüşlü mutlak manyetik enkoderler, motor tarafı ve çıkış tarafı geri bildirimi sağlar ve bus kurulumları için özel bir ID anahtarı içerir.
Bağlantılar, güç, RS485/CAN iletişimi ve UART sinyal bağlantıları için net bir şekilde tanımlanmış terminaller ile basitleştirilmiştir.
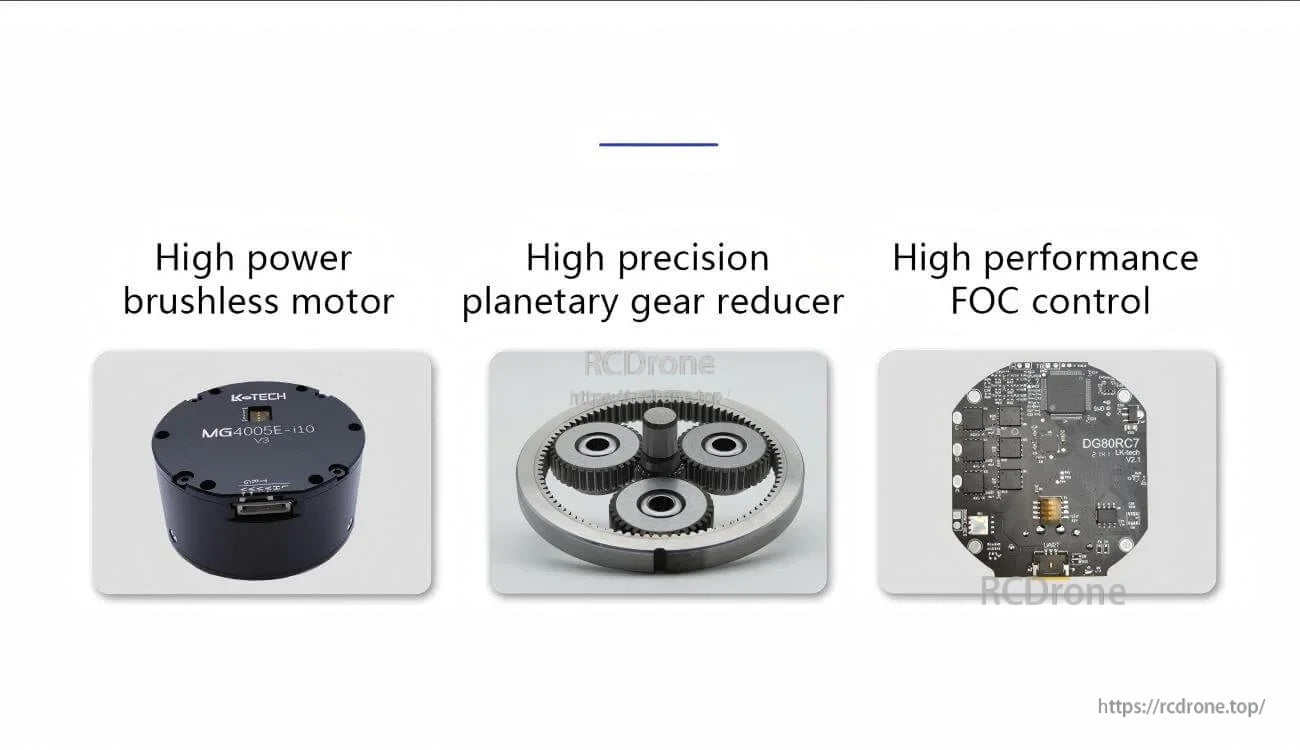
Fırçasız motor, hassas gezegen dişli sistemi ve FOC kontrolü, pürüzsüz tork iletimi ve doğru hareket kontrolünü destekler.

Sürücü, esnek entegrasyon için RS485 veya CAN iletişimini ve geniş bir giriş voltajı aralığını (7.4–32V) destekler.
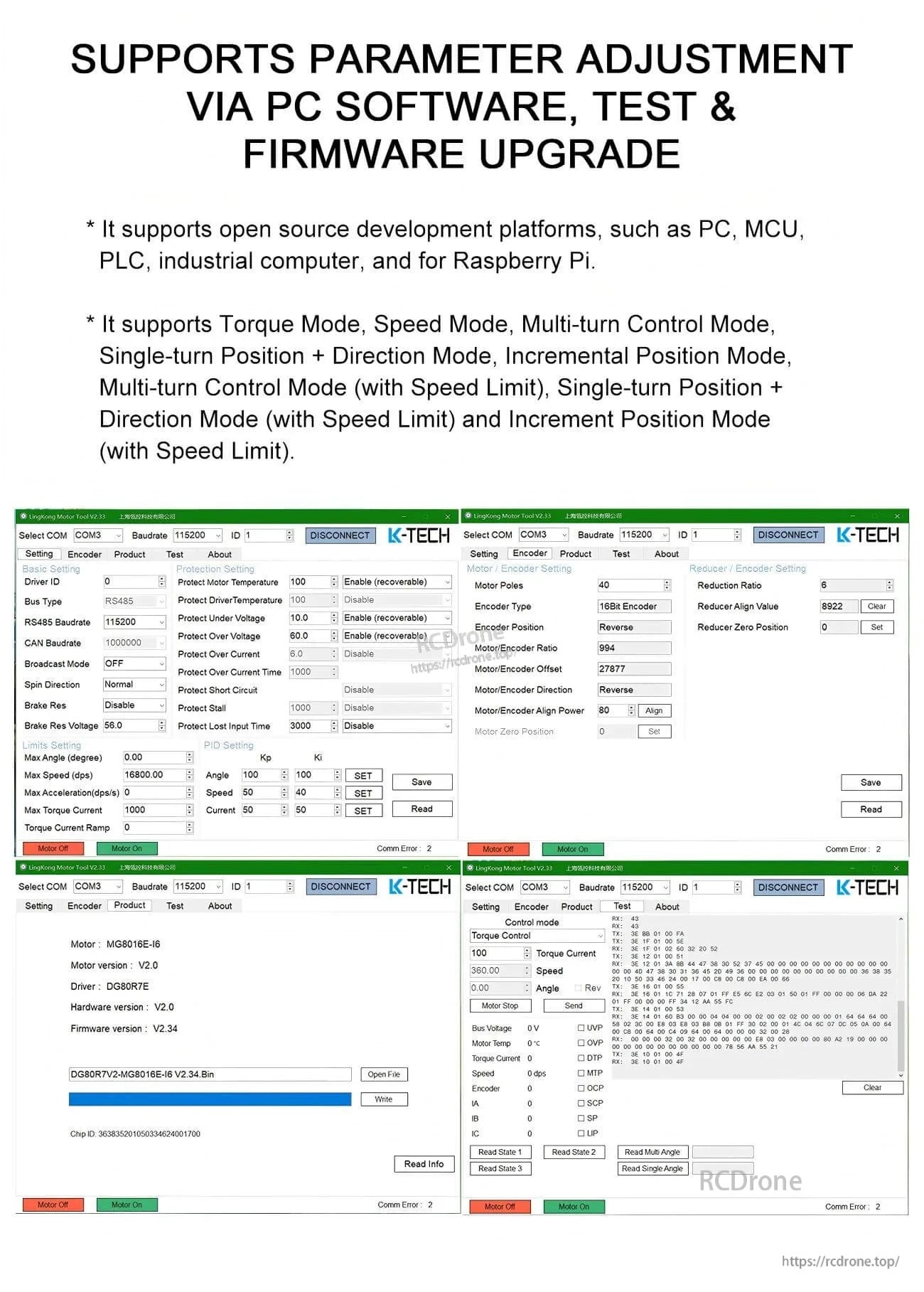
PC yazılımı, devreye alma ve bakım sırasında parametre ayarlama, fonksiyonel test yapma ve yazılım güncellemeleri sağlar.
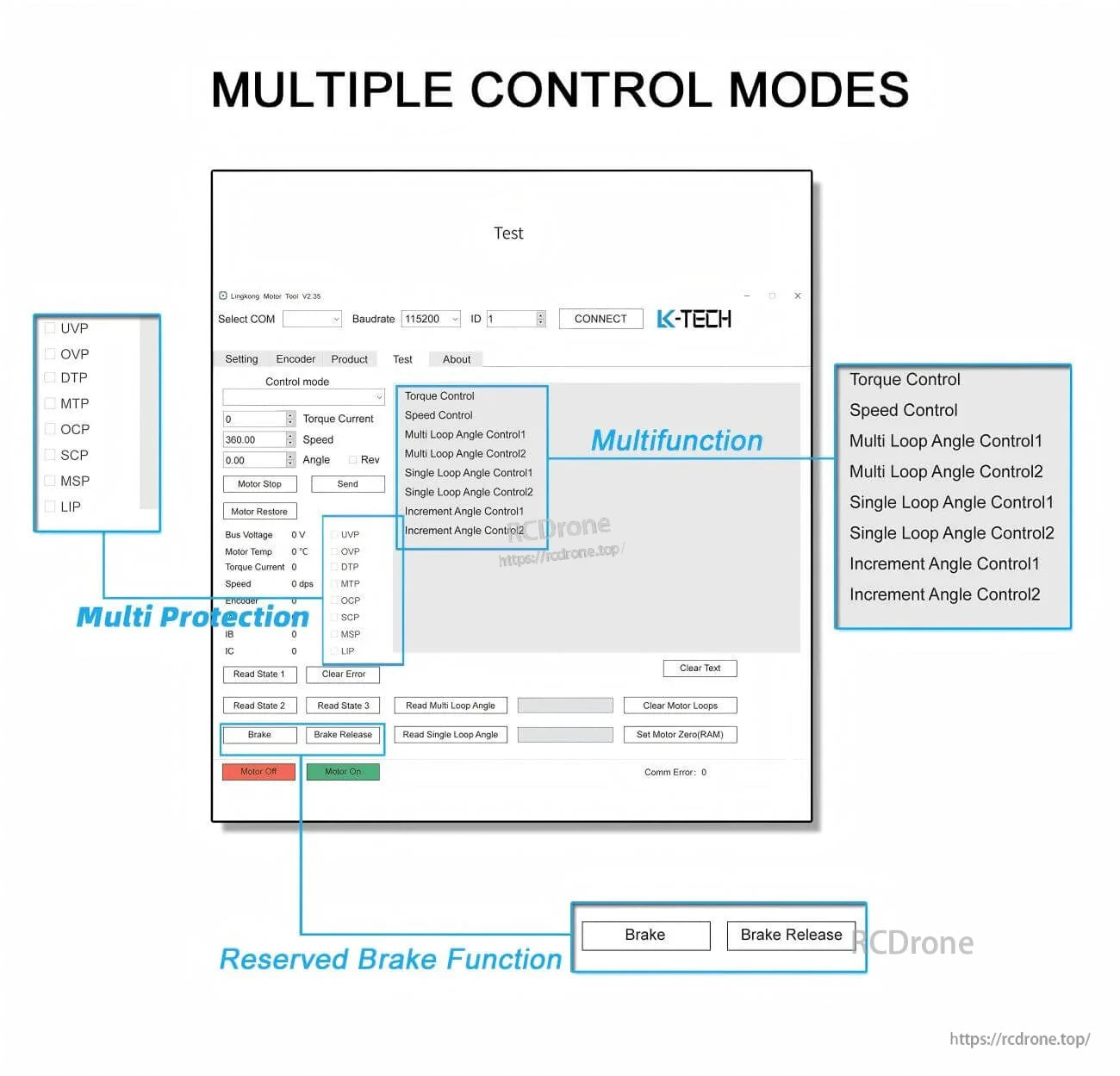
Tork, hız ve pozisyon kontrolü gibi birden fazla kontrol modundan seçim yapın, yerleşik koruma durumu izleme ile.
Mobil robotlar, eklemli kollar, dört ayaklılar ve giyilebilir robotlar için kompakt harekete yönelik tasarlanmıştır.
Related Collections




