




LKMTECH MG4010E-i10-V3 Motor 24V 320RPM 2.5N.m Planet Dişli Redüktör 1:10 RS485/CAN Enkoder
LKMTECH MG4010E-i10-V3 Motor 24V 320RPM 2.5N.m Planet Dişli Redüktör 1:10 RS485/CAN Enkoder
LKMTECH
Teslim alım stok durumu yüklenemedi
Genel Bakış
LKMTECH MG4010E-i10-V3 motor, yüksek hassasiyet, büyük tork ve stabil kapalı döngü kontrolü gerektiren robot ve otomasyon aktüatörleri için tasarlanmış, planet dişli redüktörlü ve mutlak manyetik enkoderlere sahip fırçasız motor'dur. RS485 veya CAN bus iletişimini destekler ve önerilen DG40E sürücüsü ile çalışır (giriş voltajı 7.4-32V).
Temel Özellikler
- Yüksek standart tasarım; yüksek güç, büyük tork, yüksek hassasiyet
- Yüksek güçsüz fırçasız motor + yüksek hassasiyetli gezegen dişli redüktörü
- Yüksek performanslı FOC kontrolü (sürücü ile ilgili özellik)
- Çift encoder; güç kapandıktan sonra sıfır noktasını hatırlar (tek dönüş için mutlak değer çıkışı)
- Motor tarafı encoder: 18-bit tek dönüş mutlak manyetik encoder
- Redüktör tarafı encoder: 14-bit tek dönüş mutlak manyetik encoder
- Motor ve sürücü sıcaklığının gerçek zamanlı izlenmesi için çift sıcaklık sensörü arayüzü (motor sıcaklığı: EVET)
- ID anahtarı (motor muhafazasında gösterilmiştir)
Teknik Özellikler
| Ürün Adı | MG4010E-i10-V3 |
| Nominal Voltaj | 24V |
| Maksimum Hız | 320RPM |
| Nominal Hız | 260RPM |
| Değerlendirilmiş Tork | 2.5N.m |
| Maksimum Tork | 4.5N.m |
| Nominal Akım | 3.5A |
| Maksimum Güç | 140W |
| Hız Sabiti | 108.3rpm/V |
| Tork Sabiti | 0.07N.m/A |
| Dönüşler | 14 |
| Sargı Tipi | Y |
| Aşama Direnci | 0.604Ω |
| Aşama Endüktansı | 0.28mH |
| Motor Kutupları | 28 |
| Rotor atalet momenti | 202gcm² |
| Motor Sıcaklığı | EVET |
| Redüktör Tipi | PG4210 |
| Redüksiyon Oranı | 1:10 |
| Boşluk | ≤8 arcmin (görüntü metni ayrıca şunu belirtir: dişli boşluğu 6 arcmin) |
| Rulman Nominal Yükü | 1000N |
| Motor Ağırlığı | 250g |
| Boyut | Φ53*41 |
| Tavsiye Edilen Sürücü | DG40E |
| Sürücü giriş Voltajı | 7.4-32V |
| İletişim | RS485 VEYA CAN |
| İletişim Frekansı | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | 18bit(motor)+14bit(reducer)Manyetik Encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M |
| Kontrol Modu | Moment Döngüsü(24KHz)/Hız Döngüsü(8KHz)/Pozisyon Döngüsü(4KHz) |
| İvme eğrisi | Trapezoidal ivme |
Arayüz Tanımı
| A/H | RS485-A Veya CAN-H |
| B/L | RS485-B Veya CAN-L |
| V- | Negatif Güç Kaynağı |
| V+ | Pozitif Güç Kaynağı |
| A/H | RS485-A veya CAN-H |
| B/L | RS485-B veya CAN-L |
| T | UART Verici |
| R | UART Alıcı |
| G | Signal GND |
Uygulama Senaryoları
- İnsansı Robotlar
- Robot Kolları
- Ekoskeletonlar
- Dört Bacaklı Robotlar
- AGV Araçları / AGV aracı
- ARU Robotları
- Robot köpek
- Giyilebilir robot
Entegrasyon soruları için (RS485/CAN ayarları, enkoder baud hızı seçimi veya sürücü eşleştirmesi), [email protected] or ile iletişime geçin https://rcdrone.top/.
Kılavuzlar
Ayrıntılar

Yüksek tork, yüksek hassasiyet ve stabil kapalı döngü kontrolü gerektiren robotik aktüatörler için tasarlanmıştır.

RS485 veya CAN bus iletişimi, yaygın robot kontrolörleri ve sürücüleri ile esnek entegrasyonu destekler.
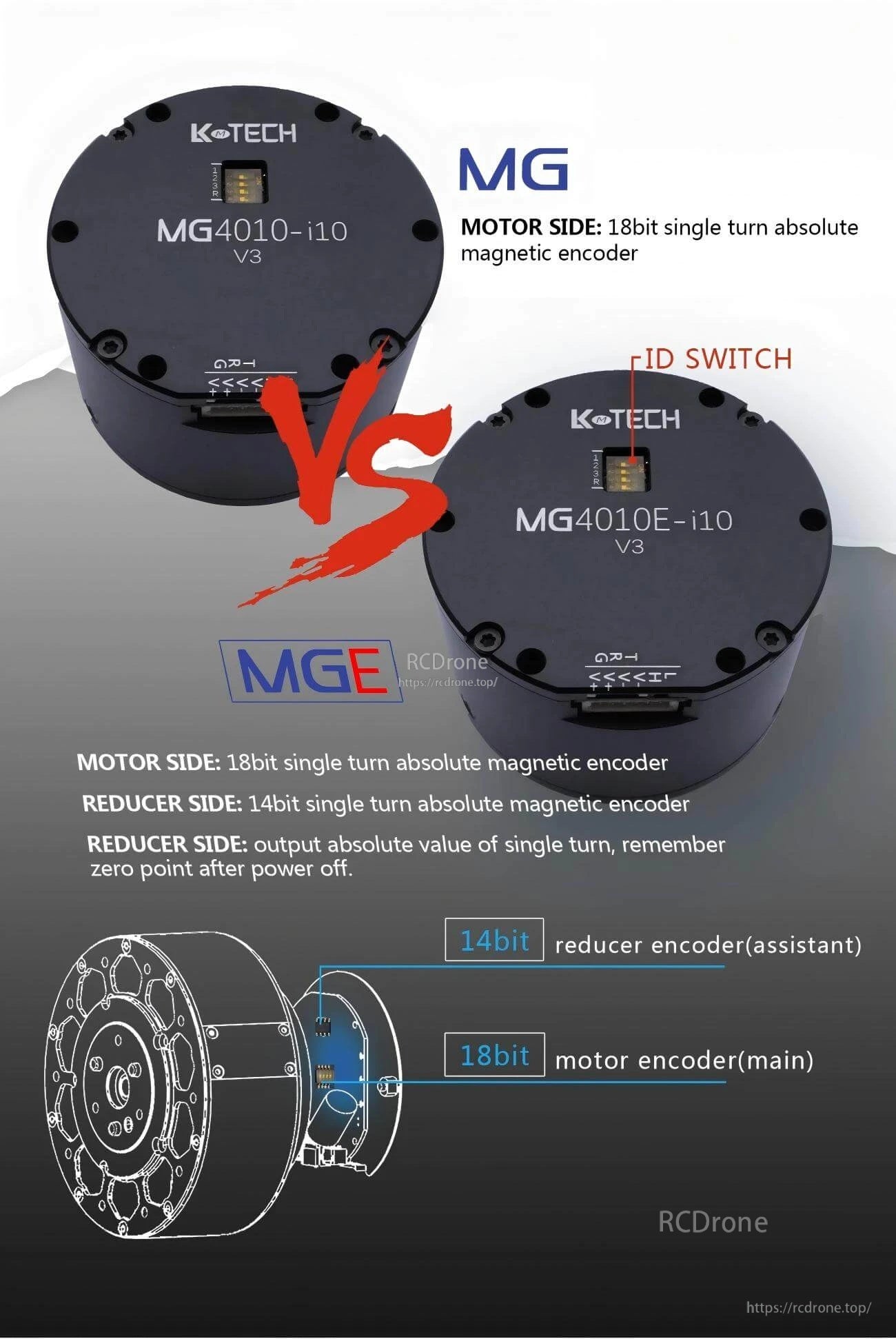
Çift mutlak enkoderler (motor + redüktör), güç kapandığında sıfır noktasını korumaya yardımcı olarak tekrarlanabilir konumlandırma sağlar.
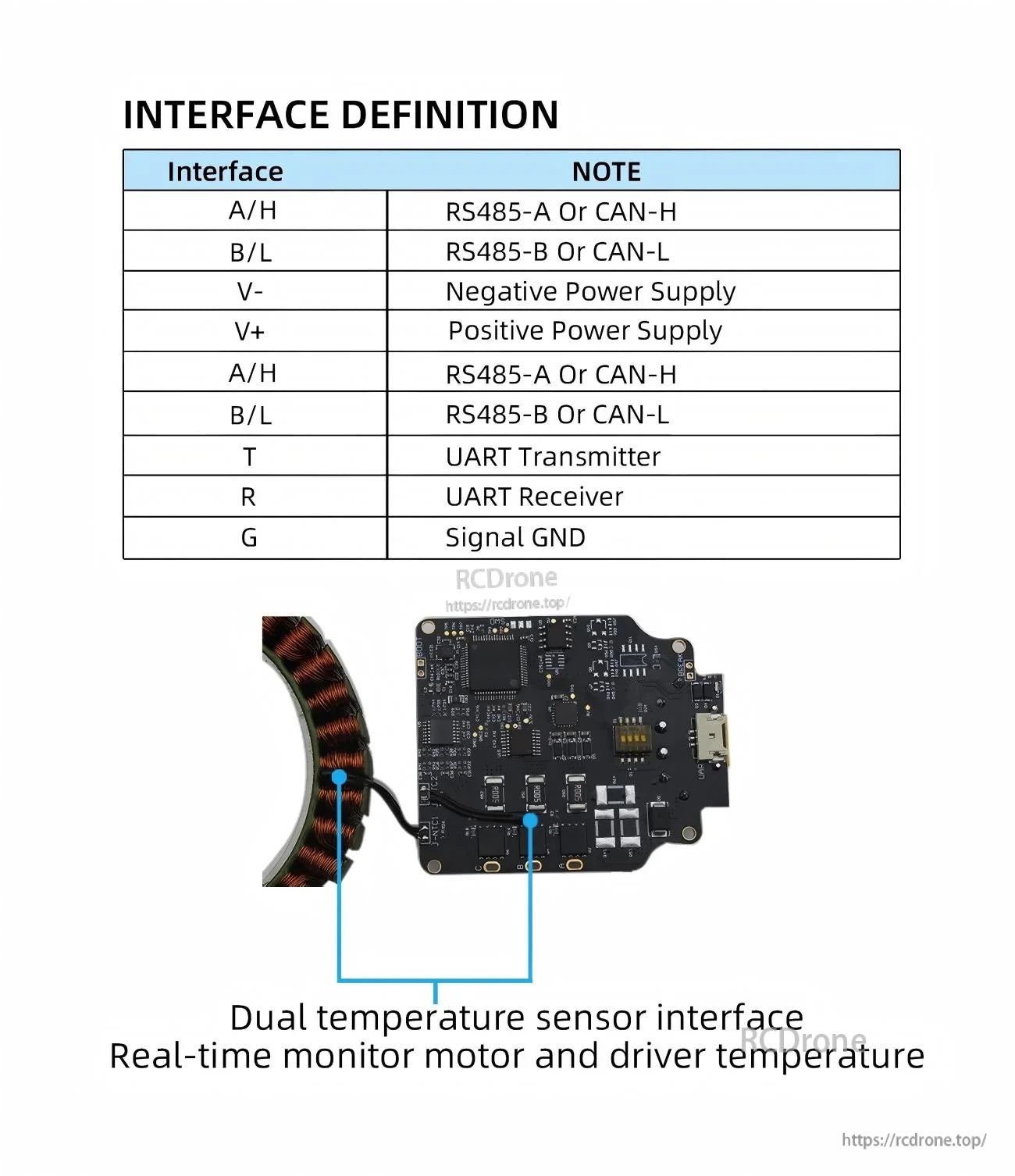
Pin tanımları, entegrasyon sırasında güç kablolarını bağlamayı ve RS485/CAN iletişimini seçmeyi kolaylaştırır.

1:10 gezegen redüktörü, dar aktüatör alanlarında kompakt tork çıkışı için optimize edilmiştir.
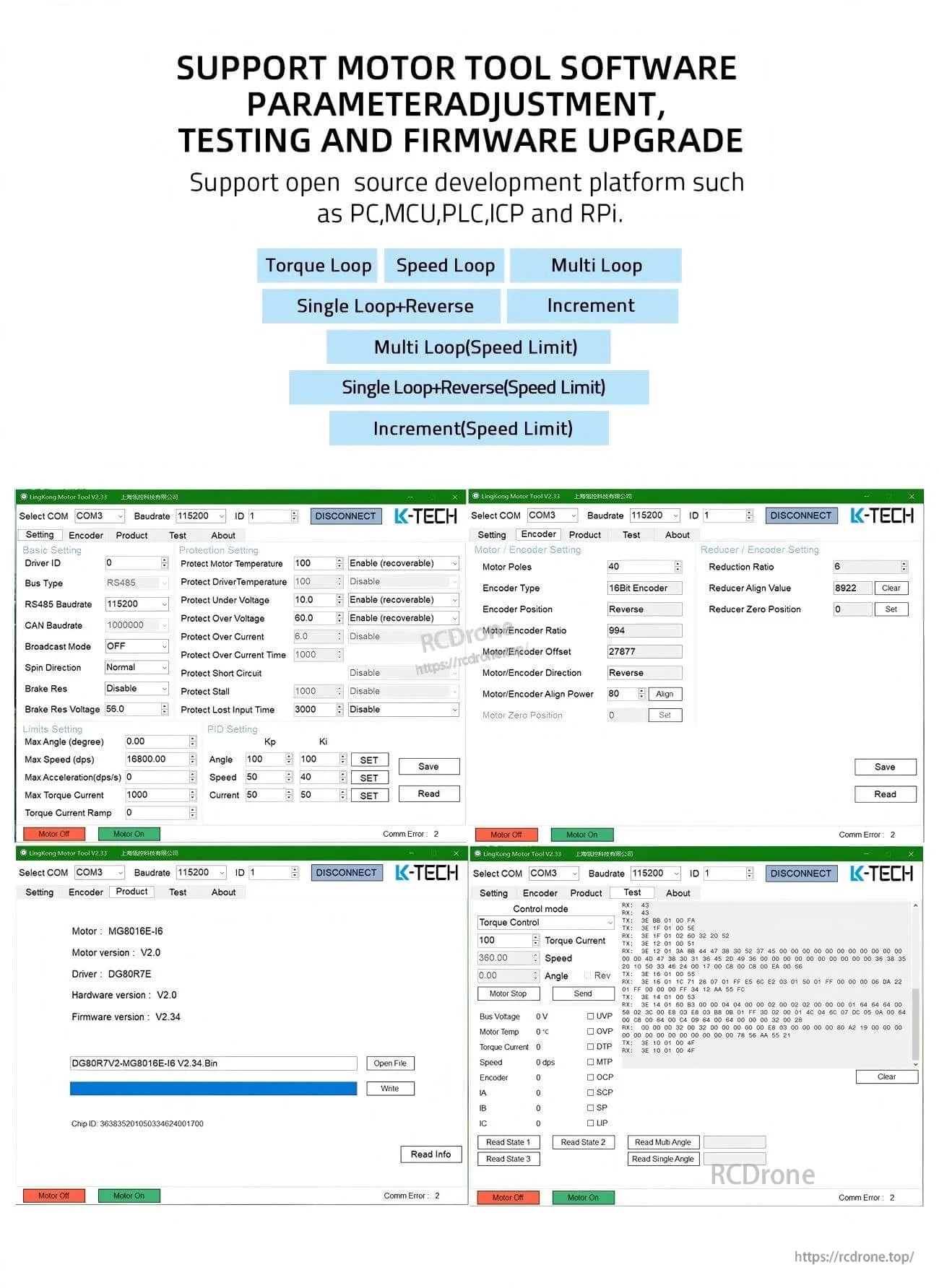
PC araç yazılımı, devreye alma sırasında parametre ayarı, fonksiyonel testler ve yazılım güncellemelerini destekler.
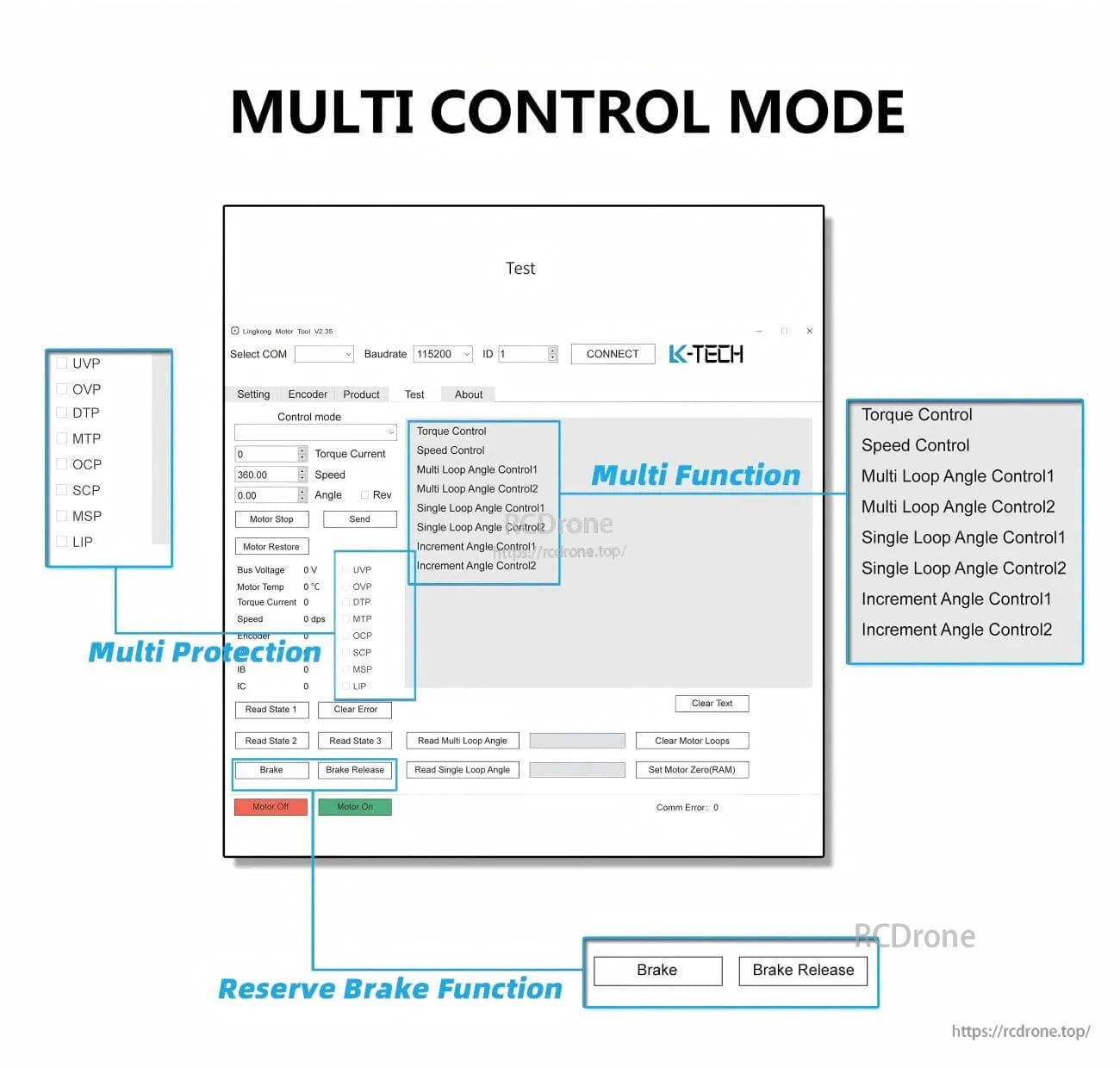
Birden fazla kontrol modu ve koruma seçeneği, tork, hız ve pozisyon döngüsü iş akışlarını destekler.
Kesin dişli ve geri bildirim gerektiren AGV'ler, robot kolları, dört ayaklılar ve giyilebilir robot eklemleri için uygundur.
Related Collections




