




LKMTECH MG4010E-i10B-V3 Planet Dişli Motoru, Frenli, 24V 320RPM, RS485/CAN, 18bit Enkoder
LKMTECH MG4010E-i10B-V3 Planet Dişli Motoru, Frenli, 24V 320RPM, RS485/CAN, 18bit Enkoder
LKMTECH
Teslim alım stok durumu yüklenemedi
Genel Bakış
LKMTECH MG4010E-i10B-V3 motor, kompakt boyut, dişli tork çıkışı ve fieldbus iletişimi (RS485 veya CAN) gerektiren robotik ve otomasyon aktüatörleri için tasarlanmış bir gezegen dişli motoru dur. 18bit manyetik enkoder kullanır ve tork, hız ve konum kontrol döngülerini destekler.
Temel Özellikler
- Frenli iki aşamalı gezegen dişli motoru (MG4010E-i10B serisi)
- Dişli oranı: 1:10; Dişli boşluğu: 8 arcmin (aynı zamanda ≤8 arcmin olarak belirtilmiştir)
- 18bit tek dönüş mutlak manyetik enkoder (18bit manyetik enkoder)
- İletişim: RS485 veya CAN
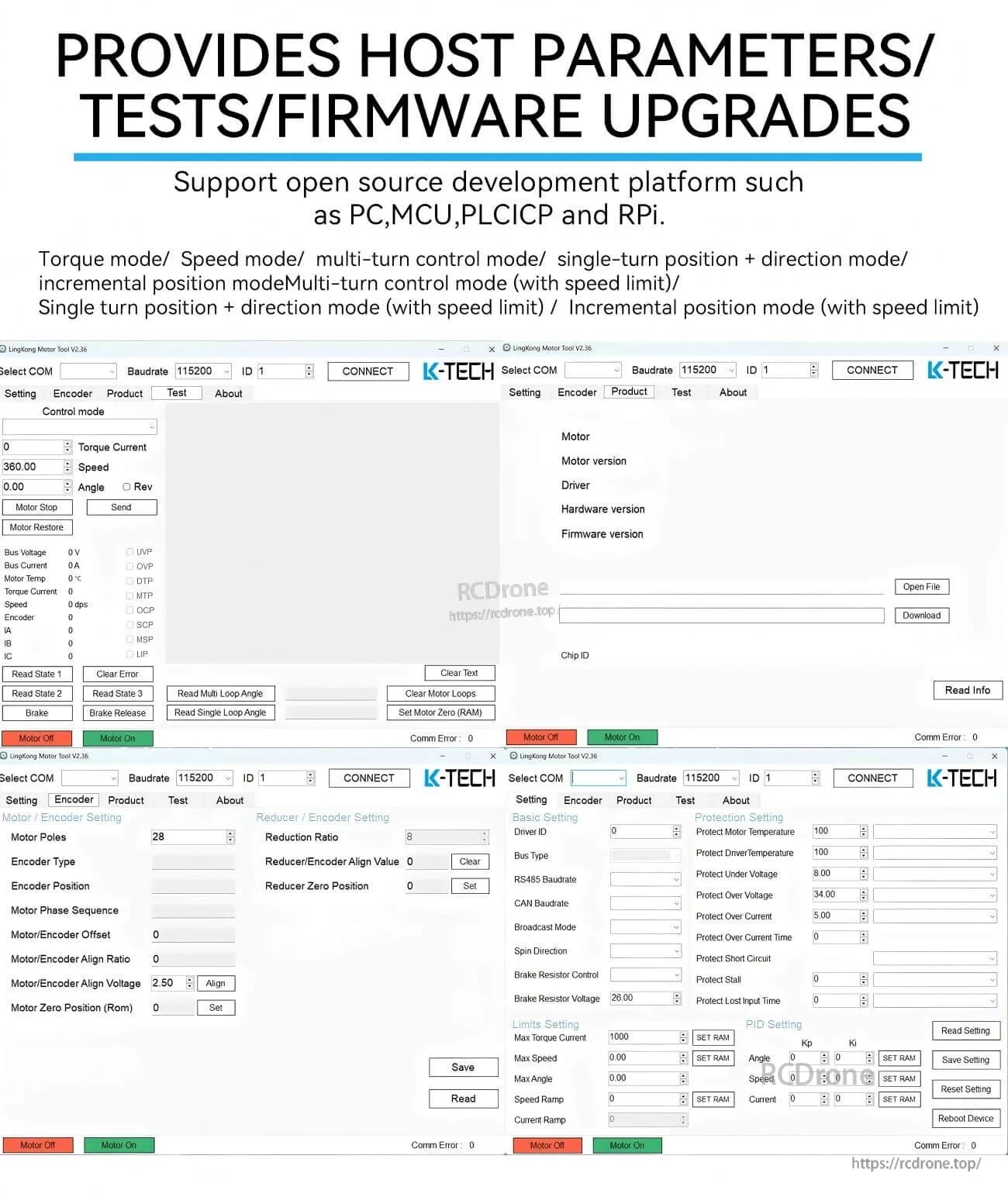
- Kontrol modları/döngüleri: Tork Döngüsü (32KHz) / Hız Döngüsü (8KHz) / Konum Döngüsü (4KHz)
- İvme eğrisi: Trapezoidal ivme
- Entegre fren; Fren tipi BG4906; Fren torku 3.2 N.m
- Arayüz özellikleri: ID anahtarı
- Sürücü ile ilgili metin: Dahili fren; RS485 veya CAN bus iletişimi; Çift enkoder, güç kapandığında sıfır noktasını hatırlar; Giriş voltajı 12-60V
Teknik Özellikler
| Ürün Adı | MG4010E-i10B-V3 |
| Nominal Voltaj | 24V |
| Maksimum Hız | 320RPM |
| Nominal Hız | 260RPM |
| Nominal Tork | 2.5N.m |
| Maksimum Tork | 4.5N.m |
| Nominal Akım | 3.5A |
| Maksimum Güç | 140W |
| Hız sabiti | 108.3rpm/V |
| Tork Sabiti | 0.07N.m/A |
| Dönüşler | 14 |
| Sargı Tipi | Y |
| Aşama Direnci | 0.604Ω |
| Aşama Endüktansı | 0.28mH |
| Motor Kutupları | 28 |
| Rotor atalet momenti | 202gcm² |
| Motor Sıcaklığı | EVET |
| Redüktör Tipi | PG4210 |
| İndirme Oranı | 1:10 |
| Oynama | ≤8 arcmin |
| Rulman Nominal Yükü | 1000N |
| Motor Ağırlığı | 392g |
| Fren Tipi | BG4906 |
| Fren Torku (N.m) | 3.2N.m |
| Başlangıç Voltajı (V) | 24V |
| Sürdürücü Voltajı (V) | 7V |
| Sürdürücü Gücü (W) | 1.4W |
| Tavsiye Edilen Sürücü | DG40 |
| Sürücü Giriş Voltajı | 7.4-32V |
| İletişim | RS485 VEYA CAN |
| İletişim Frekansı | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | 18bit Manyetik Encoder |
| Encoder Baudrate(RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate(CAN) | 100K, 125K, 250K, 500K, 1M |
| Kontrol Modu | Moment Döngüsü(32KHz)/Hız Döngüsü(8KHz)/Pozisyon Döngüsü(4KHz) |
| İvme eğrisi | Trapezoidal ivme |
| Motor boyutu | Φ 59*37 |
| Dişli boşluğu | 8 arcmin |
Arayüz Tanımı
- ID anahtarı
| Port | Talimatlar |
|---|---|
| A/H | RS485-A veya CAN-H |
| B/L | RS485-B veya CAN-L |
| V- | Negatif Güç Kaynağı |
| V+ | Pozitif Güç Kaynağı |
| A/H | RS485-A veya CAN-H |
| B/L | RS485-B veya CAN-L |
| T | UART Verici |
| R | UART Alıcı |
| G | Signal GND |
Uygulamalar
- İnsansı Robotlar
- Robotik Kollar
- Ekoskeletonlar / Ekoskeleton robot
- Dört Ayaklı Robotlar / Mekanik Köpek
- AGV Araçları / AGV araba
- ARU Robotları
- Servis robotu
- Taşınabilir lidar
- Rehabilitasyon eğitim robotu
- İnceleme robotu
Kılavuzlar
Entegrasyon desteği ve ön satış soruları için iletişime geçin [email protected] or ziyaret edin https://rcdrone.top/.
Detaylar

Entegre fren, 1:10 oranında azaltma ve ≤8 arcmin boşluk ile hassas robotik eklemler için kompakt bir MG4010E-i10B-V3 planetar dişli motor.
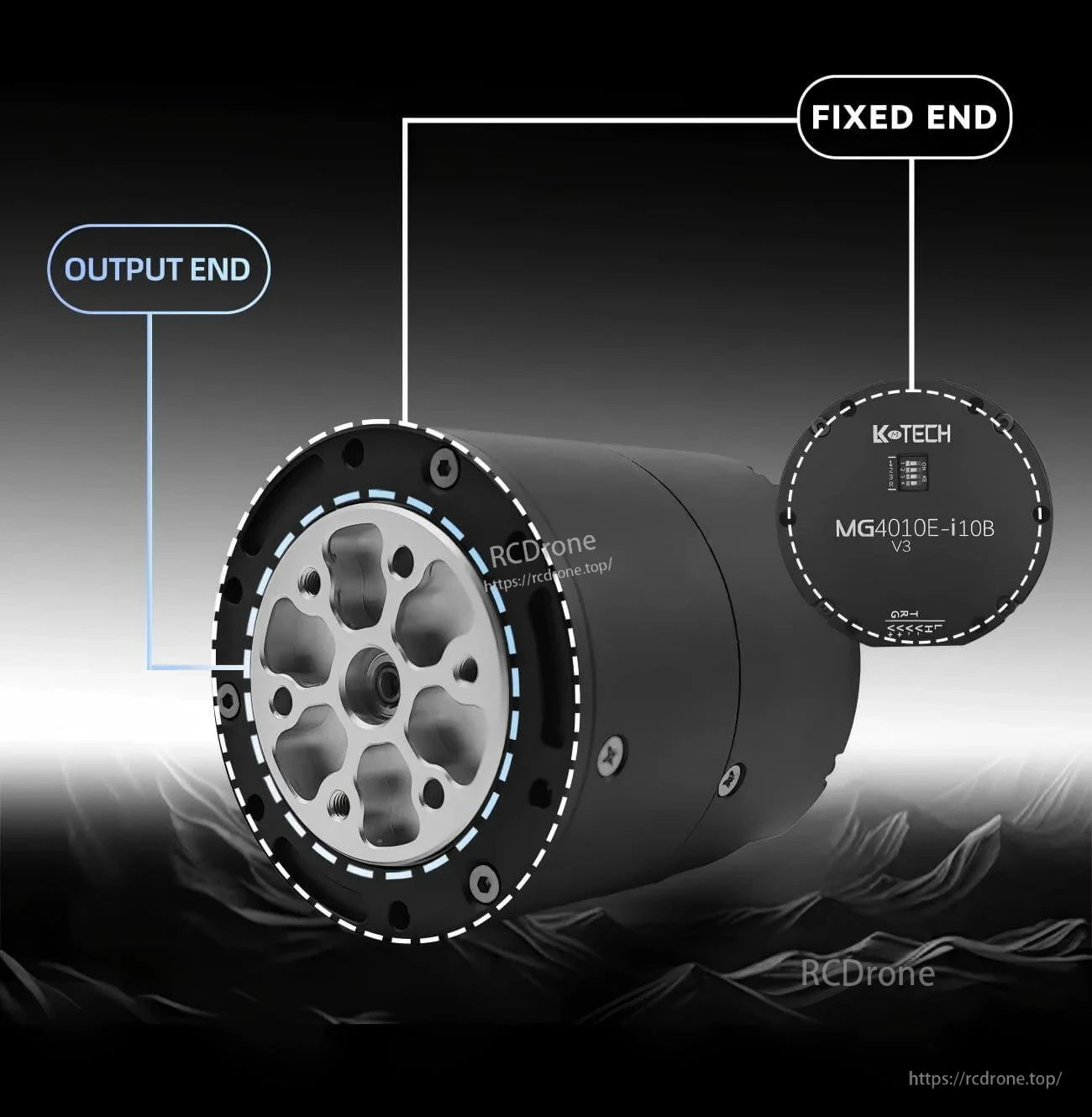
Çıkış ucu ile sabit uç arasındaki net tanımlama, entegrasyon sırasında mekanik düzen ve kablolama yönünü basitleştirmeye yardımcı olur.

18-bit tek dönüşlü mutlak manyetik enkoder ve RS485/CAN veri yolu desteği, otomasyon aktüatörleri için tork, hız ve konum kontrolü sağlar.
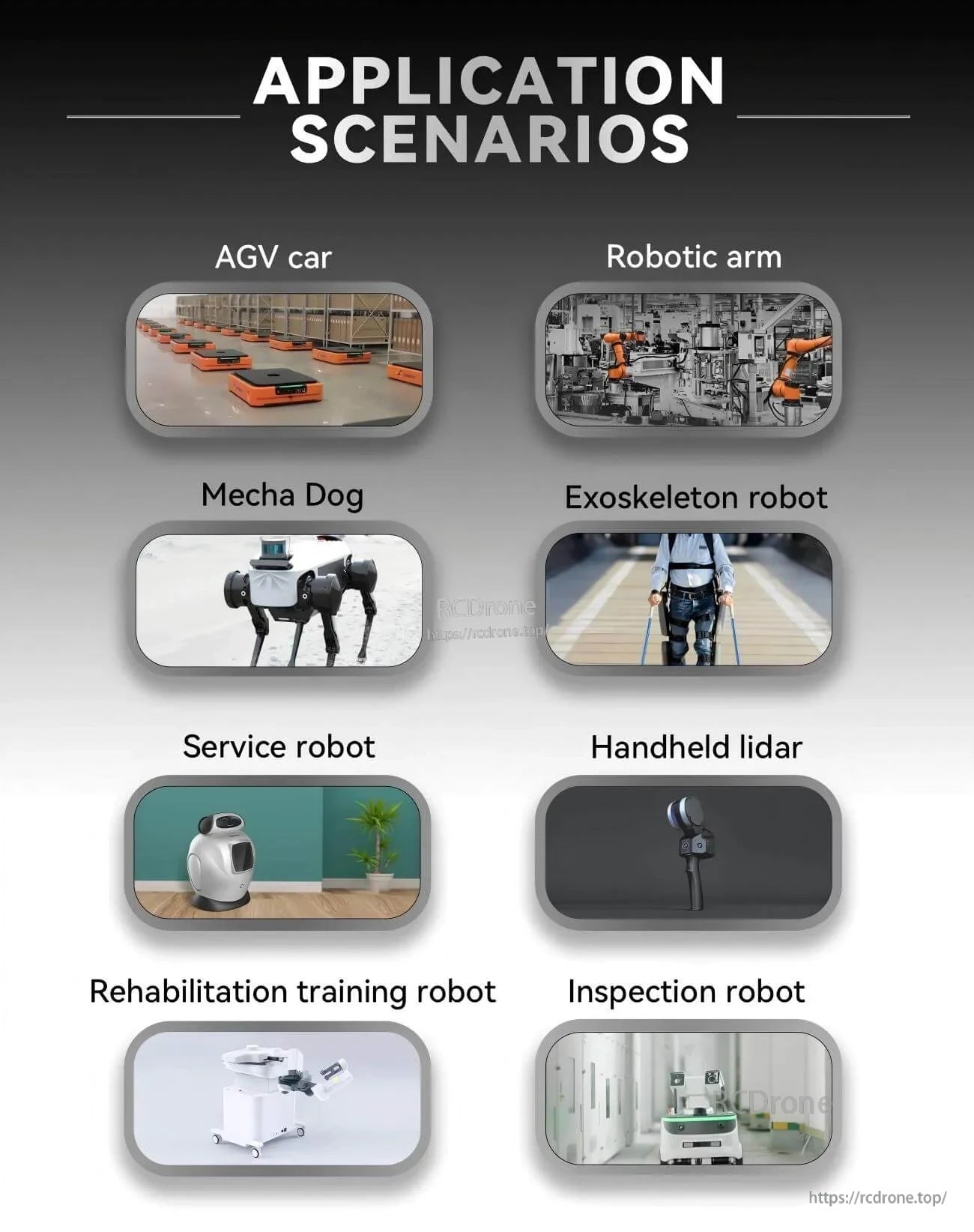
AGV'ler, robot kolları, dört ayaklı robotlar, dış iskeletler ve denetim platformları gibi robotik ve otomasyon kullanım durumları için tasarlanmıştır.
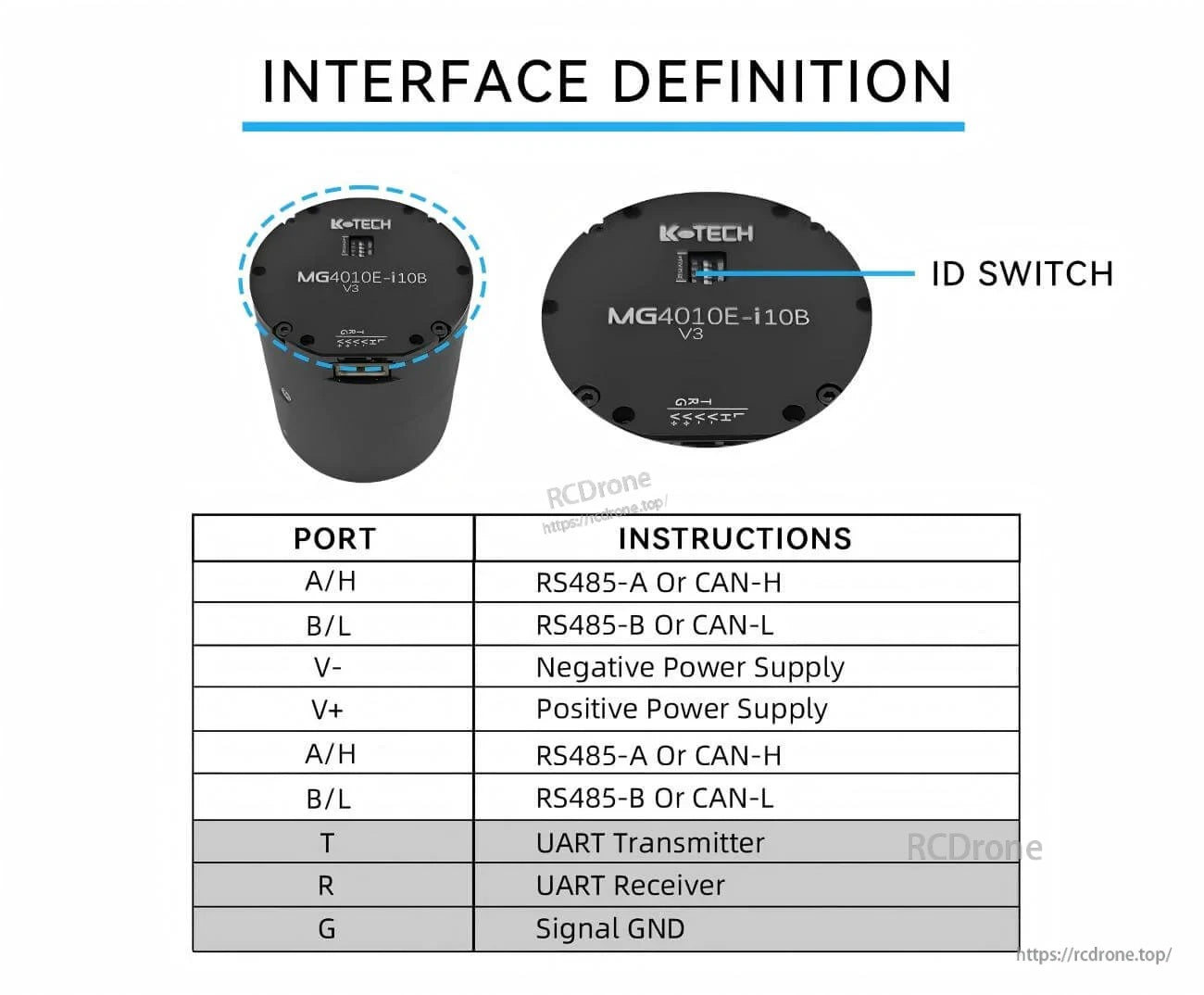
Port haritalaması, RS485-A/CAN-H ve RS485-B/CAN-L'yi, ayrıca güç, UART TX/RX, sinyal toprak ve yerleşik bir ID anahtarını içerir.

Related Collections




