




LKMTECH MG4010E-i36-V3 Planet Dişli Motor 24V 1:36 RS485/CAN Manyetik Enkoder Robotik için
LKMTECH MG4010E-i36-V3 Planet Dişli Motor 24V 1:36 RS485/CAN Manyetik Enkoder Robotik için
LKMTECH
Teslim alım stok durumu yüklenemedi
Genel Bakış
LKMTECH MG4010E-i36-V3 Motor, robotik ve hareket kontrol aktüatörleri için tasarlanmış bir gezegen dişli motoru'dur. Fırçasız motor, gezegen redüktörü ve manyetik enkoderi birleştirir; iletişim seçenekleri RS485 veya CAN olarak listelenmiştir.
Önemli Özellikler
- Gezegen dişli motoru (MG4010E-i36, V3).
- Dişli oranı: 1:36 (aynı zamanda “Dişli oranı 1:36” olarak gösterilmiştir).
- Dişli boşluğu: 7 arcmin (görüntü etiketi) / 12 arcmin (özellik tablosu).
- Enkoder: 18bit tek dönüş mutlak manyetik enkoder (görüntü metni); ayrıca 18bit (motor) + 14bit (redüktör) manyetik enkoder olarak listelenmiştir (özellik tablosu).
- İletişim: RS485 veya CAN.
- Sürücü/FOC sürücüsü referanslı (görüntü metni: “Yüksek performanslı FOC sürücüsü”).
- Yerleşik fren (görüntü metni/Kullanıcı Arayüzü etiketi).
- Ev sahibi parametreleri/testler/firmware güncellemeleri desteklenmektedir (görüntü metni).
Özellikler
| Ürün Adı | MG4010E-i36-V3 |
| Nominal Voltaj | 24V |
| Maksimum Hız | 90RPM |
| Nominal Hız | 77RPM |
| Nominal Akım | 2.4A |
| Maksimum Güç | 132W |
| Nominal Tork | 6 N.m (özellik tablosu) / 9 N.m (görsel etiketi) |
| Maksimum Tork | 13 N.m (özellik tablosu) / 18 N.m (görsel etiketi) |
| Hız Sabiti | 3 rpm/V |
| Tork Sabiti | 2.58 N.m/A |
| Dönüşler | 14 |
| Sargı Tipi | Y |
| Aşama Direnci | 0.68 Ω |
| Aşama İndüktansı | 0.25 mH |
| Motor Kutbu | 28 |
| Rotor atalet momenti | 158 gcm² |
| Motor Sıcaklığı | Evet |
| Redüktör Tipi | PG5336 |
| Redüksiyon Oranı | 1:36 |
| Boşluk | ≤12 arcmin (özellik tablosu) / 6 arcmin (görüntü etiketi) |
| Rulman Nominal Yükü | 1120 N |
| Motor Ağırlığı | 378 g |
| Tavsiye Edilen Sürücü | DG40E |
| Sürücü giriş Voltajı | 12-24V (özellik tablosu) / 12-60V (görüntü etiketi) |
| İletişim | RS485 VEYA CAN |
| İletişim Frekansı | RS485: 500 Hz (115200 bps) / CAN: 2 KHz (1 Mbps) |
| Encoder | 18bit (motor) + 14bit (reducer) Manyetik Encoder |
| Encoder Baud Hızı (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2 Mbps |
| Baud Hızı (CAN) | 100K, 125K, 250K, 500K, 1M |
| Kontrol Modu | Moment Döngüsü (24 KHz) / Hız Döngüsü (8 KHz) / Pozisyon Döngüsü (4 KHz) |
| İvme eğrisi | Trapezoidal ivme |
| Motor Boyutu | Φ 53*54.5 (görüntü etiketi) |
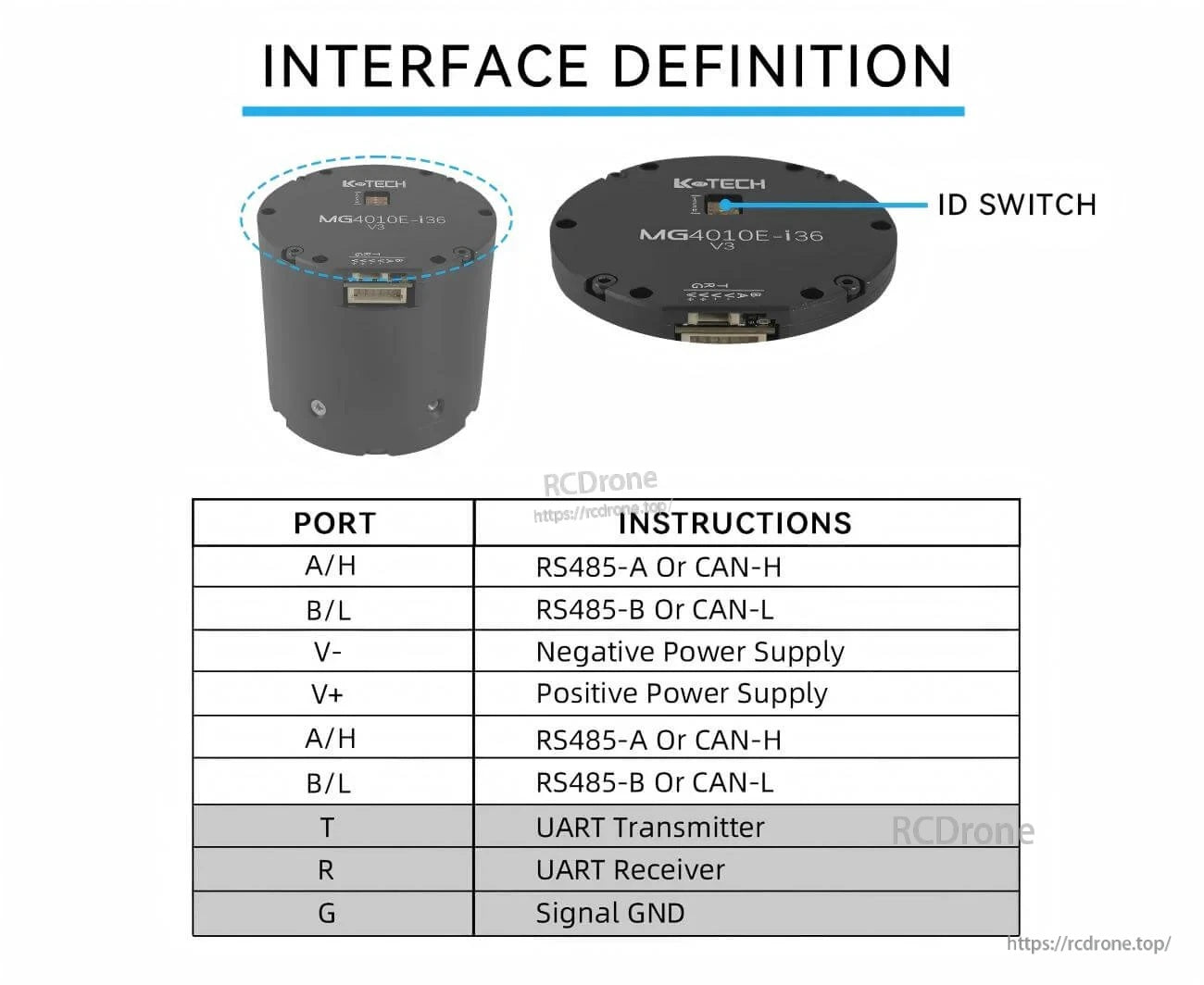
Arayüz Tanımı
- ID anahtarı (görüntü etiketi: “ID ANAHTARI”).
| Port | Talimatlar |
|---|---|
| A/H | RS485-A veya CAN-H |
| B/L | RS485-B veya CAN-L |
| V- | Negatif Güç Kaynağı |
| V+ | Pozitif Güç Kaynağı |
| T | UART Verici |
| R | UART Alıcı |
| G | Signal GND |
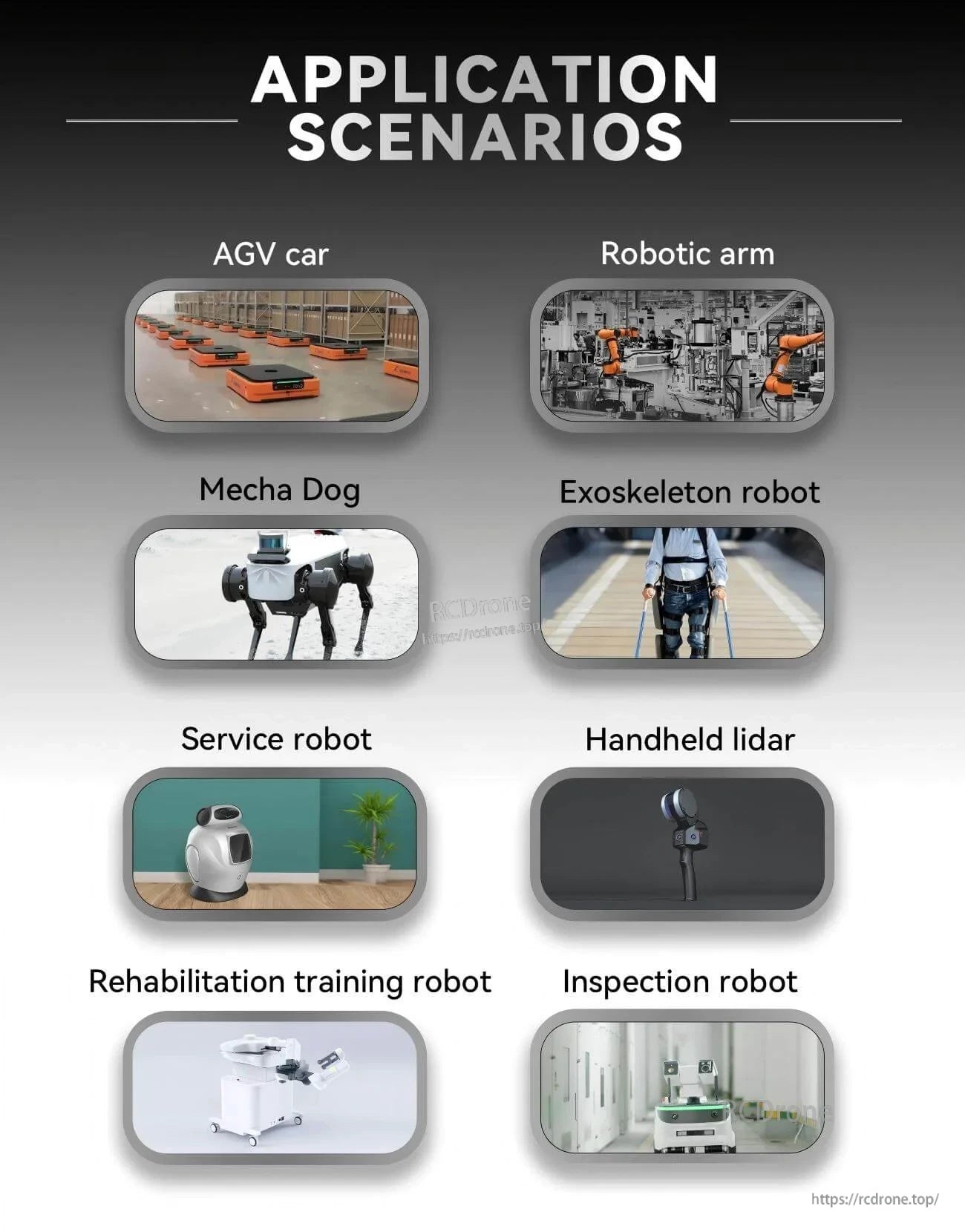
Uygulama Senaryoları
- İnsansı Robotlar
- Robotik Kollar
- Ekoskeletonlar
- Dört Ayaklı Robotlar
- AGV Araçları / AGV aracı
- ARU Robotları
- Mecha Köpek
- Hizmet robotu
- Taşınabilir lidar
- Rehabilitasyon eğitim robotu
- İnceleme robotu
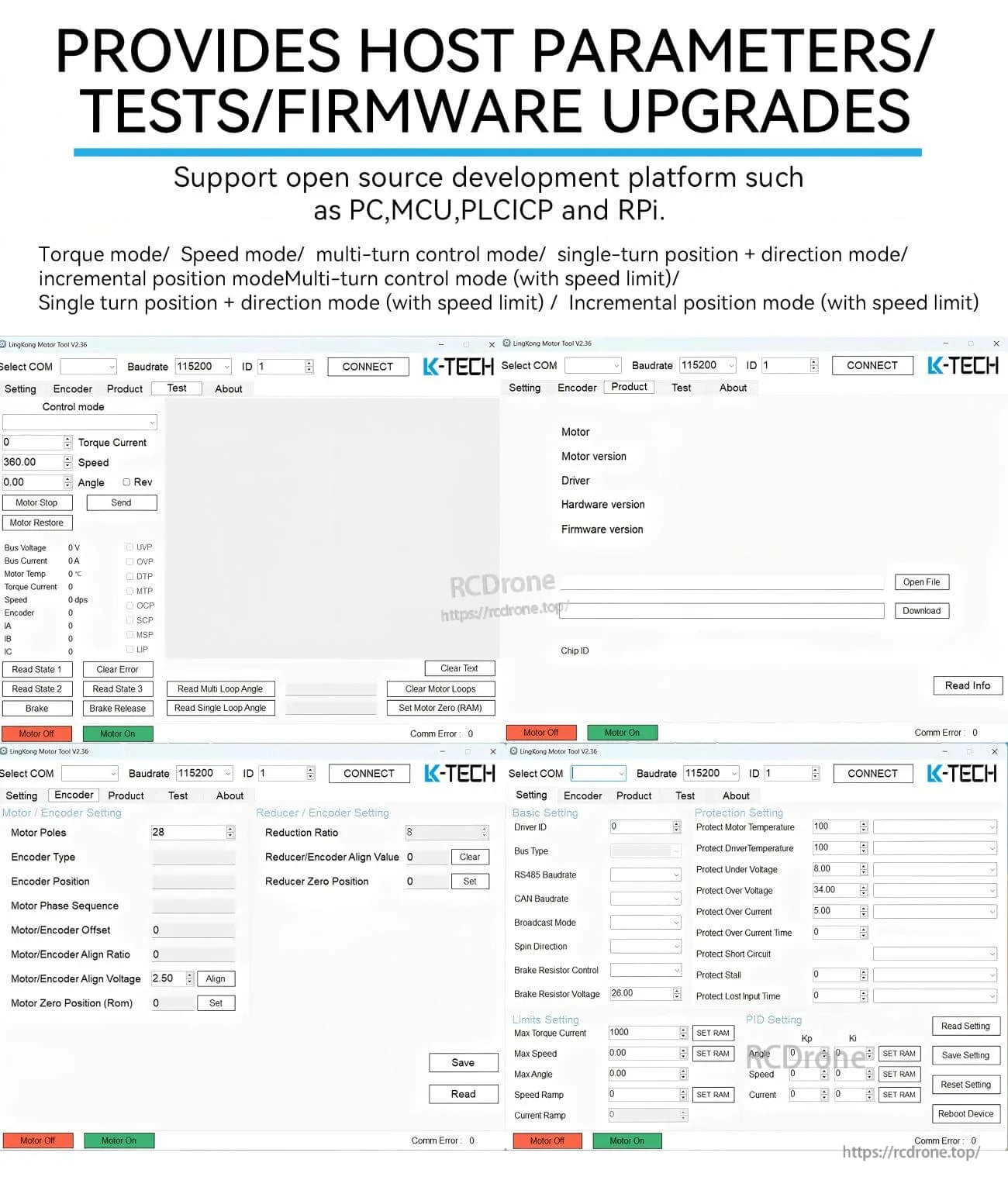
Kontrol & Yazılım Notları
- PC, MCU, PLC, ICP ve RPi gibi açık kaynak geliştirme platformlarını destekler.
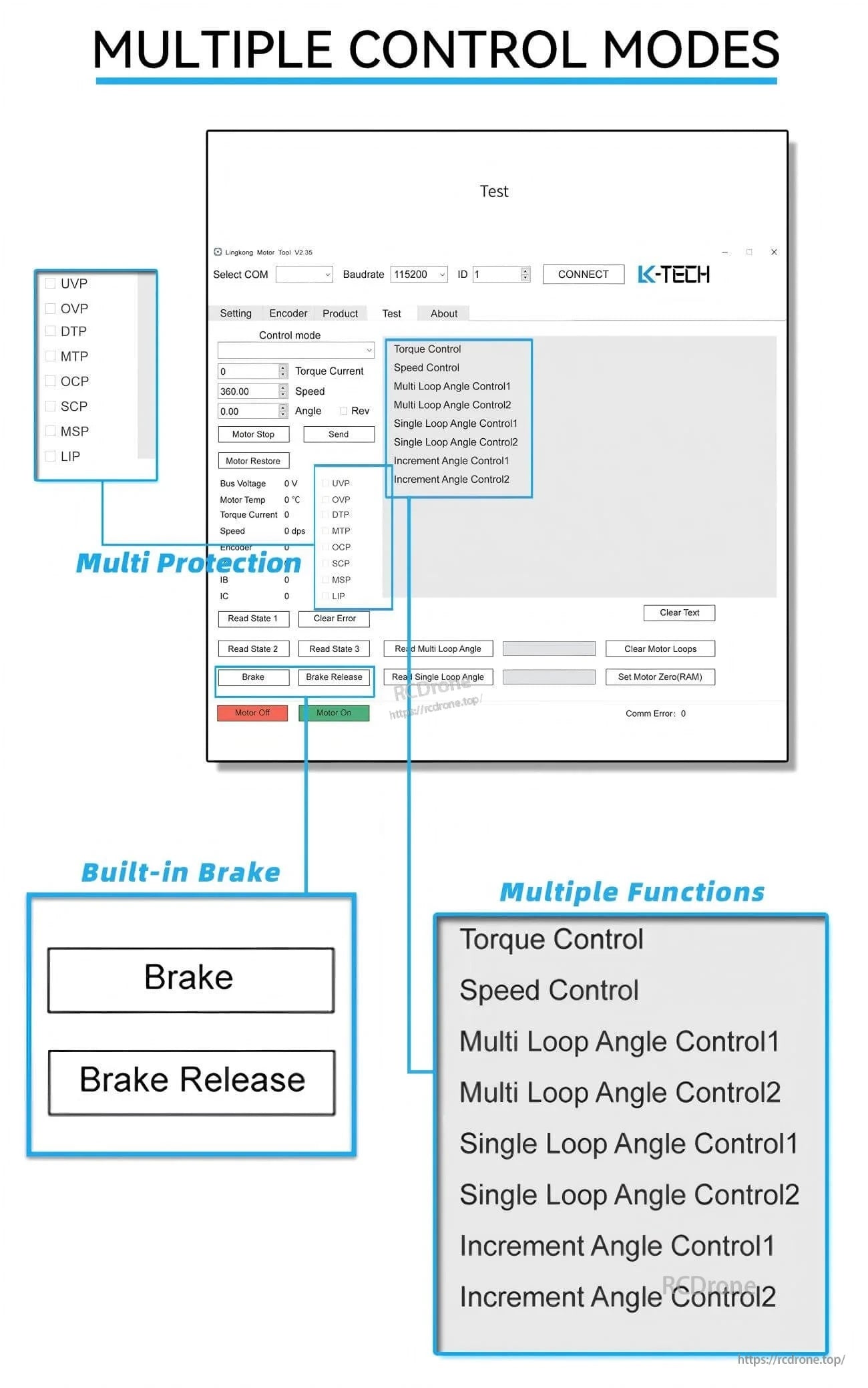
- Listelenen modlar (görüntü metni): Tork modu, Hız modu, çoklu dönüş kontrol modu, tek dönüş pozisyon + yön modu, artımlı pozisyon modu; hız sınırı olan versiyonlar da gösterilmektedir.
- Kullanıcı arayüzünde gösterilen birden fazla kontrol modu: Tork Kontrolü, Hız Kontrolü, Çoklu Döngü Açısı Kontrolü1, Çoklu Döngü Açısı Kontrolü2, Tek Döngü Açısı Kontrolü1, Tek Döngü Açısı Kontrolü2, Artım Açısı Kontrolü1, Artım Açısı Kontrolü2.
- Gösterilen çoklu koruma etiketleri: UVP, OVP, DTP, MTP, OCP, SCP, MSP, LIP.
- Gösterilen yerleşik fren kontrolü: Fren, Fren Serbest Bırakma.
Satış öncesi uyumluluk kontrolleri (RS485/CAN entegrasyonu, baud hızı seçimi) veya dosya erişim yardımı için iletişime geçin [email protected] or ziyaret edin https://rcdrone.top/.
Kılavuzlar / Belgeler
Ayrıntılar

MG4010E-i36-V3, kompakt robotik aktüatörler için fırçasız motor, gezegen dişlisi ve manyetik enkoderi bir araya getirir.
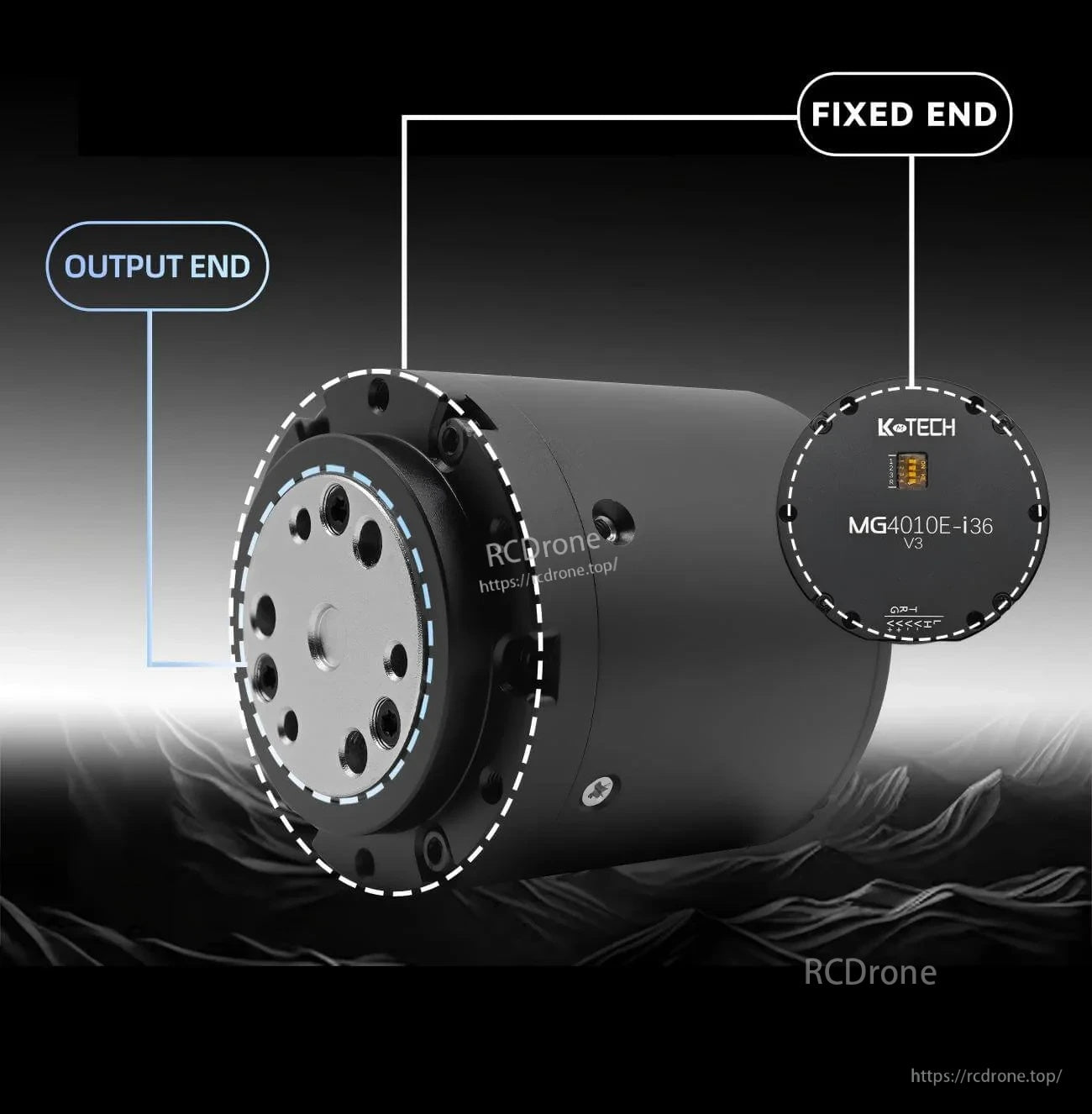
Flanş tarzı bir çıkış ucu ve sabit uç düzeni, kollar, bacaklar ve diğer eklem modüllerinde entegrasyonu kolaylaştırır.

RS485 veya CAN iletişimi, kararlı tork, hız ve konum kontrolü için bir FOC sürücü ve mutlak manyetik enkoder geri bildirimi ile eşleştirilmiştir.
Yaygın kullanım alanları arasında AGV'ler, robot kolları, dört ayaklı platformlar, dış iskeletler ve denetim veya hizmet robotları bulunmaktadır.
Bağlantılar, etiketli RS485/CAN veri yolu pinleri, güç bağlantıları, UART Tx/Rx, sinyal topraklama ve yerleşik bir kimlik anahtarı ile basitleştirilmiştir.
Yerleşik fren kontrolü ve birden fazla çalışma modu, farklı hareket kontrol görevleri ve güvenlik gereksinimleri için davranışı ayarlamaya yardımcı olur.
Related Collections




