




LKMTECH MHF6015-V3 Motor 24V 872RPM 3N.m 19bit Manyetik Enkoder RS485/CAN Robotik için
LKMTECH MHF6015-V3 Motor 24V 872RPM 3N.m 19bit Manyetik Enkoder RS485/CAN Robotik için
LKMTECH
Teslim alım stok durumu yüklenemedi
Genel Bakış
LKMTECH MHF6015-V3 motoru, 19 bit manyetik enkoder ve RS485 veya CAN iletişimi ile donatılmış 24V fırçasız bir motordur. Bu motor, insansı robotlar, robot kolları, dış iskeletler ve AGV araçları gibi robotik hareket uygulamaları için tasarlanmıştır.
Ana Özellikler
- Entegre tasarım: yerleşik sürücü kartı, yüksek performanslı MCU, ana parametre ayarı, küçük hacim ve büyük tork, yüksek hassasiyetli mutlak değer enkoderi.
- Boş tasarım; boşluk boyutu 12.7 mm olarak belirtilmiştir (boşluk çağrısında 12.6 mm gösterilmektedir).
- Akıcı çalışma; CE sertifikası (belirtilmiştir).
- Temel malzemeler beyanı: “Motorun temel malzemesi yüksek kaliteli silikon çelik levha ve yüksek sıcaklık dayanıklı güçlü mıknatıs.”
- Dış rotor beyanı: “Dış rotorun çok aşamalı düz tasarımı daha yüksek tork sağlar ve uzay ile ilgili uygulamalar için uygundur.”
- Rulman açıklaması: “Daha pürüzsüz dönüş ve daha uzun ömür için yüksek performanslı rulmanlarla fırçasız yapı.”
- Mevcut örnekleme/kontrol açıklaması: “Yüksek hassasiyet, düşük sıcaklıkta ağartılmış alaşım direnç örneklemesi, doğru akım kontrolü.”
- Sürüş açıklaması: “Tam N-tüp üç fazlı tam köprü sürüş, düşük iç direnç, yüksek akım.”
- Kontrol açıklaması: “Tork kapalı döngü, hız, konum kontrol modu rastgele değiştirilebilir.”
- Ana cihaz parametreleri/testler/firmware güncellemeleri açıklaması; PC, MCU, PLC, ICP ve RPi gibi açık kaynak geliştirme platformlarını destekler.
- Modlar açıklaması: Tork modu / Hız modu / çok dönüş kontrol modu / tek dönüş konum + yön modu / artımlı konum modu; çok dönüş kontrol modu (hız limiti ile) / tek dönüş konum + yön modu (hız limiti ile) / artımlı konum modu (hız limiti ile).
Özellikler
| Ürün Adı | MHF6015-V3 |
| Dönüşler | 25 |
| Nominal Voltaj | 24V |
| Maks Hız | 872RPM |
| Nominal Tork | 0.82N.m |
| Nominal Hız | 560RPM |
| Nominal Akım | 3.1A |
| Maks Güç | 57W |
| Maks Tork | 3N.m |
| Hız sabiti | 23.3rpm/V |
| Tork Sabiti | 0.26N.m/A |
| Sargı Tipi | Y |
| Aşama Direnci | 2.17Ω |
| Aşama Endüktansı | 1.44mH |
| Motor Kutup Sayısı | 28 |
| Rotor atalet momenti | 515gcm² |
| Motor Sıcaklığı | EVET |
| Rulman Nominal Yükü | 280N |
| Motor Ağırlığı | 251g |
| Önerilen Sürücü | DHF50 |
| Sürücü giriş Voltajı | 7.4-32V |
| İletişim | RS485 VEYA CAN |
| İletişim Frekansı | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | 19bit Manyetik Encoder |
| Encoder Baudrate(RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate(CAN) | 100K, 125K, 250K, 500K, 1M |
| Kontrol Modu | Moment Döngüsü(24KHz)/Hız Döngüsü(8KHz)/Pozisyon Döngüsü(8KHz) |
| İvme eğrisi | Trapezoidal ivme |
Seçim rehberi veya entegrasyon desteği için, müşteri hizmetleri ekibi ile https://rcdrone.top/ numarasından iletişime geçin veya [email protected] . e-posta gönderin.
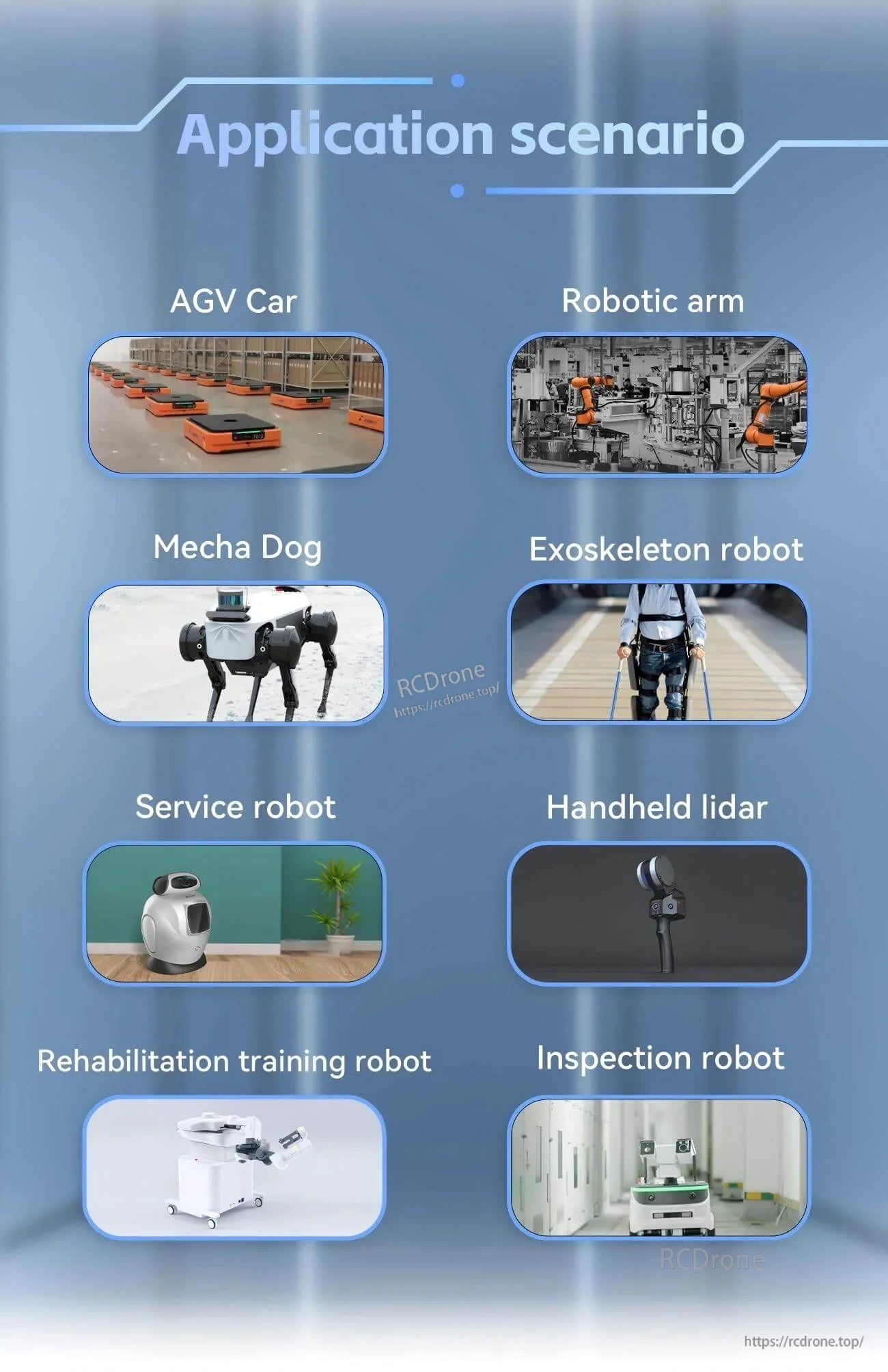
Uygulamalar
- İnsansı robotlar
- Robot kolları
- Ekoskeletonlar / ekoskeleton robotu
- Dört ayaklı robotlar / mekanik köpek
- AGV araçları / AGV aracı
- ARU robotları
- Hizmet robotu
- Taşınabilir lidar
- Rehabilitasyon eğitim robotu
- İnceleme robotu
Kılavuzlar / Belgeler
Ayrıntılar

Komple entegre servo-stili motor formatı, robotik eklemler için kablolamayı ve montajı basit tutar.
Entegre bir sürücü kartı ve MCU, daha kolay devreye alma için ana cihazdan parametre ayarlamayı destekler.
 Boş mil düzeni (12.7 mm delik) kabloları veya milleri motordan geçirerek daha temiz yapılar oluşturulmasına yardımcı olur.
Boş mil düzeni (12.7 mm delik) kabloları veya milleri motordan geçirerek daha temiz yapılar oluşturulmasına yardımcı olur.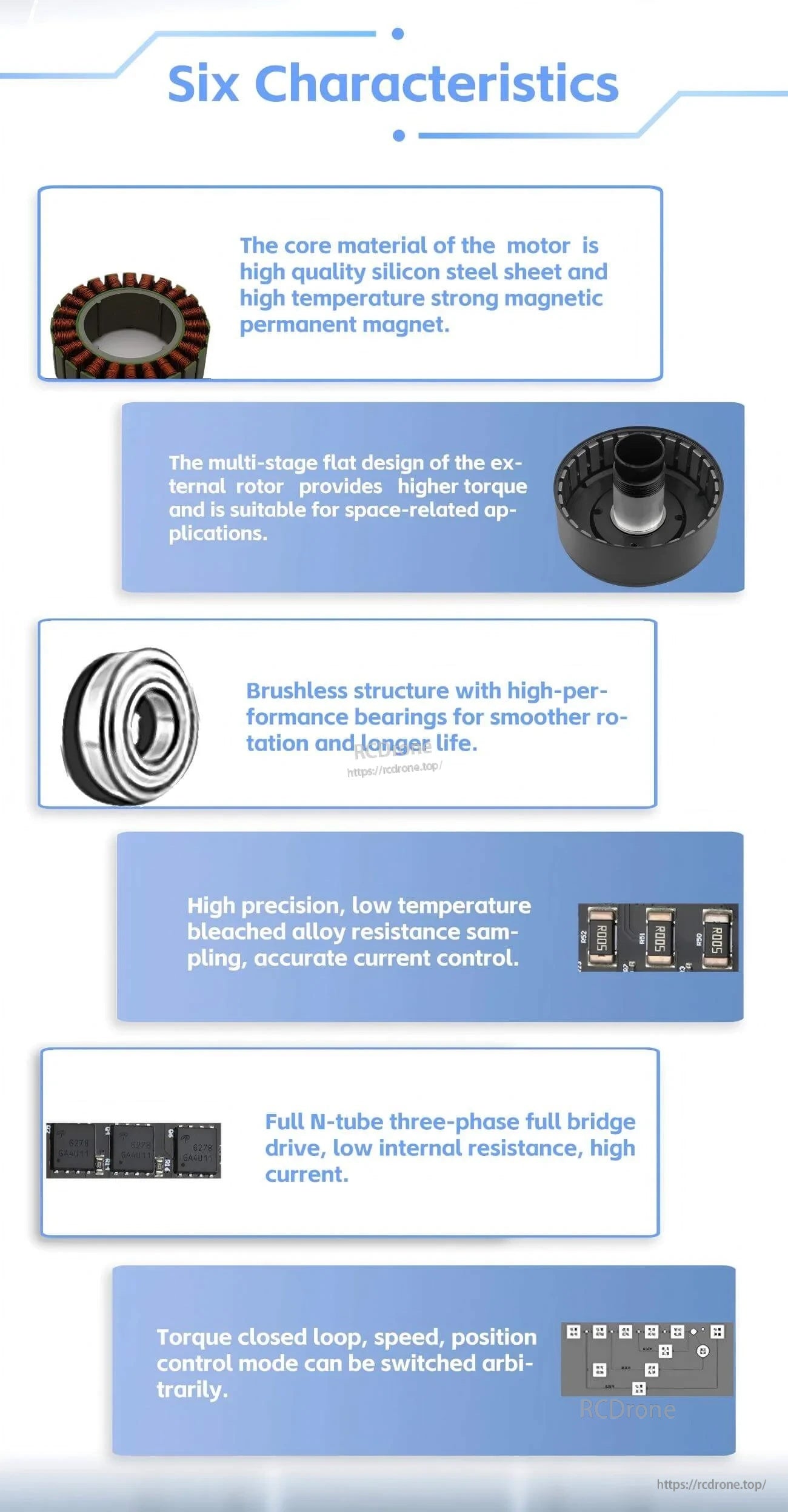
Ana tasarım notları, malzemeleri, dış rotor tork yapısını, rulmanları ve kapalı döngü kontrol yeteneklerini kapsar.
AGV'ler, robot kolları, dört ayaklılar, dış iskeletler ve hizmet robotları gibi robotik hareket görevleri için tasarlanmıştır.
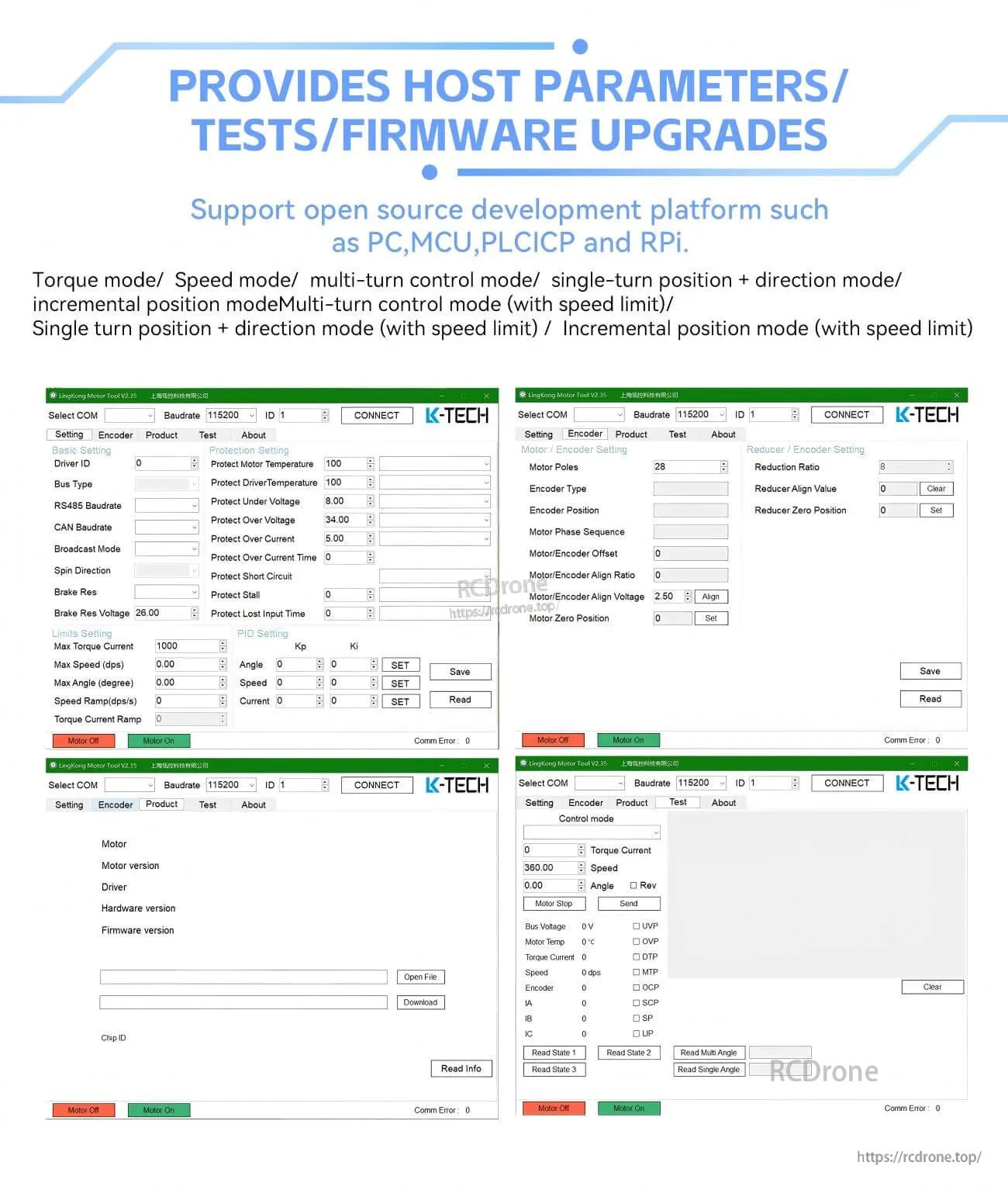
PC yazılım sayfaları, parametre ayarlarını, test işlevlerini ve yazılım güncelleme desteğini göstermektedir.

Related Collections




