




MagicLab H70 Motor Modülü, Robotik için, 30 N·m Nominal / 96 N·m Zirve, 48–54V, CAN/EtherCAT
MagicLab H70 Motor Modülü, Robotik için, 30 N·m Nominal / 96 N·m Zirve, 48–54V, CAN/EtherCAT
MagicLab
Teslim alım stok durumu yüklenemedi
Genel Bakış
MagicLab H70 Motor, robotik uygulamalar için yüksek torklu bir motor modülüdür, çift enkoder geri bildirimi ve yüksek hızlı kontrol ile hassas hareket kontrolü için tasarlanmıştır. CAN / EtherCAT iletişimini destekler ve 48V–54V çalışma için belirlenmiştir.
Temel Özellikler
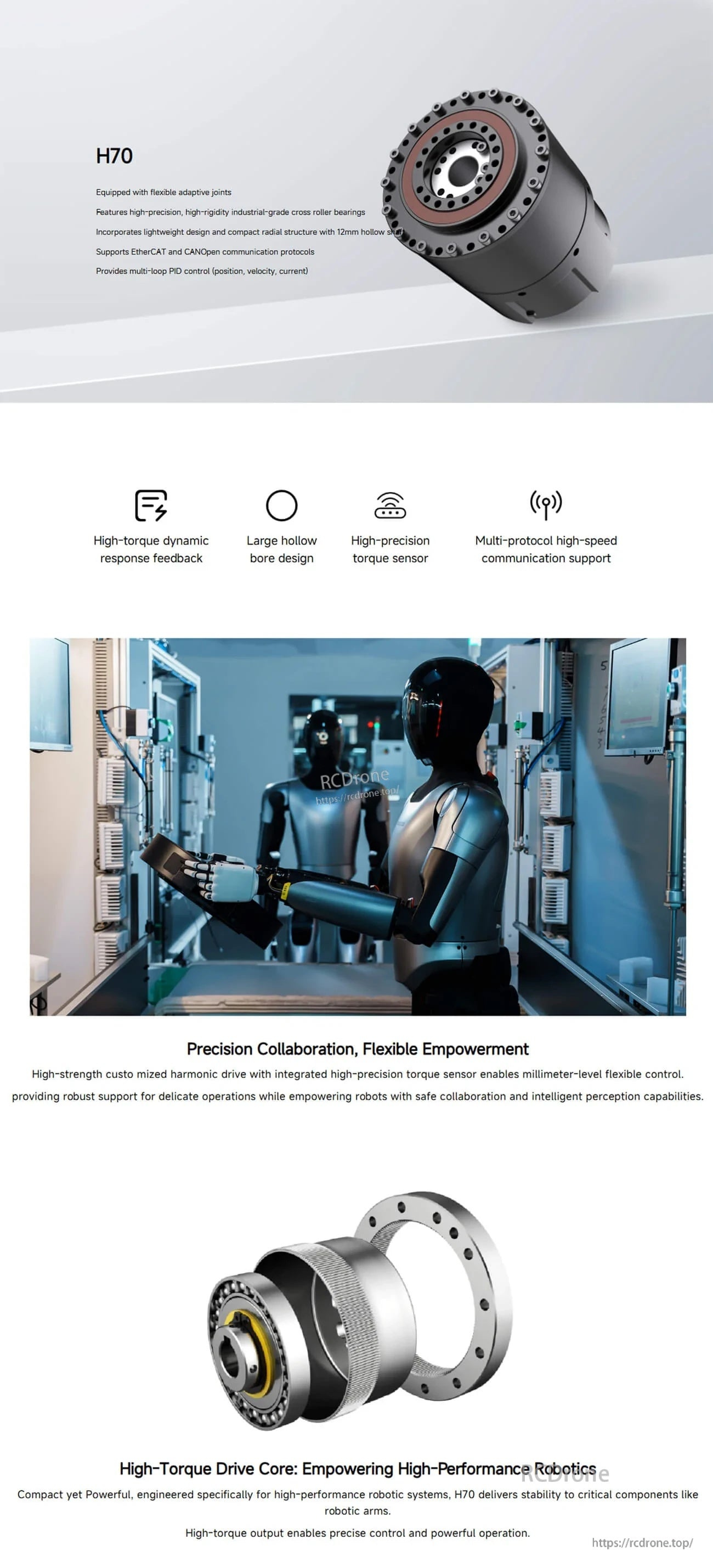
- Esnek uyumlu eklemlerle donatılmıştır
- Yüksek hassasiyetli, yüksek sertlikte endüstriyel sınıf çapraz rulmanlar
- 12mm boş mil ile hafif tasarım ve kompakt radyal yapı
- EtherCAT ve CANopen iletişim protokollerini destekler
- Çoklu döngü PID kontrolü sağlar (konum, hız, akım)
- Yüksek tork dinamik yanıt geri bildirimi
- Büyük boşluklu tasarım
- Yüksek hassasiyetli tork sensörü
- Çoklu protokol yüksek hızlı iletişim desteği
Uygulamalar
- İnsansı robotlar
- Robot kolları
- Ekoskeletonlar
- Dört ayaklı robotlar
- AGV araçları
- ARU robotları
Entegrasyon desteği ve ön satış soruları için iletişim kurun [email protected] or ziyaret edin https://rcdrone.top/.
Teknik Notlar
- Entegre yüksek hassasiyetli tork sensörü ile yüksek dayanımlı özelleştirilmiş harmonik sürücü, milimetre seviyesinde esnek kontrol sağlar, hassas işlemler için sağlam destek sunarken güvenli işbirliği ve akıllı algılama yeteneklerini mümkün kılar.
- Optimal kutup-yuva uyumu seçimi ile akı yoğunluğunun optimize edilmiş tasarımı; harmonik dağılım katsayılarının azaltılması ve diş harmoniklerinin ortadan kaldırılması.
- Motor kontrol karakteristik eğrisi sağlanmıştır (grafik).
Özellikler
| Maksimum Hız | 30 rpm (48V güç kaynağı) |
| Modül Ağırlığı | 900g |
| Nominal Tork | 30 N·m |
| Zirve Tork | 96 N·m |
| Boyutlar | φ70*96 |
| Çalışma Voltajı | 48V - 54V |
| Zirve Akım | 11 A |
| Tavsiye Edilen Çalışma Ortamı | -5°C ~ 40°C |
| Encoder Konfigürasyonu | Çift Encoder |
| Motor Encoder Çözünürlüğü | 19 Bit |
| Kontrol Frekansı | 25,000 Hz |
| İletişim Arayüzü | CAN / EtherCAT |
| Akı Yoğunluğu Grafiği Açıklaması | A [Wb/m] (Max: 0.0034, Min: -0.0034) |
Ayrıntılar
Hassas robotik eklemler için tasarlanan MagicLab H70, temiz kablo yönlendirmesi için yüksek torku kompakt bir boş mil form faktörü ile birleştirir.
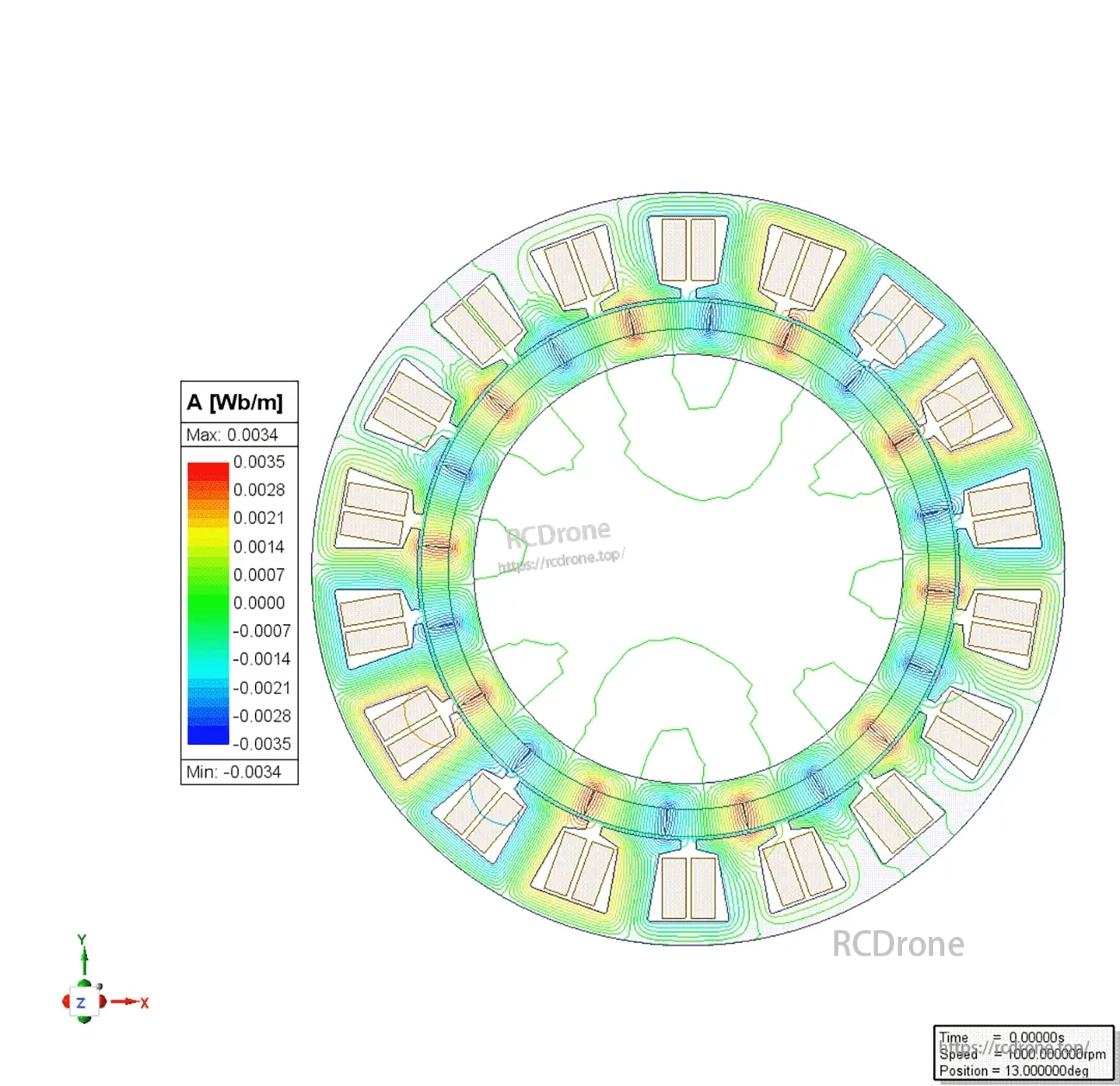
Optimize edilmiş akı yoğunluğu dağılımı, daha pürüzsüz tork çıkışını destekler ve zorlu hareket kontrolünde harmonik etkileri azaltmaya yardımcı olur.
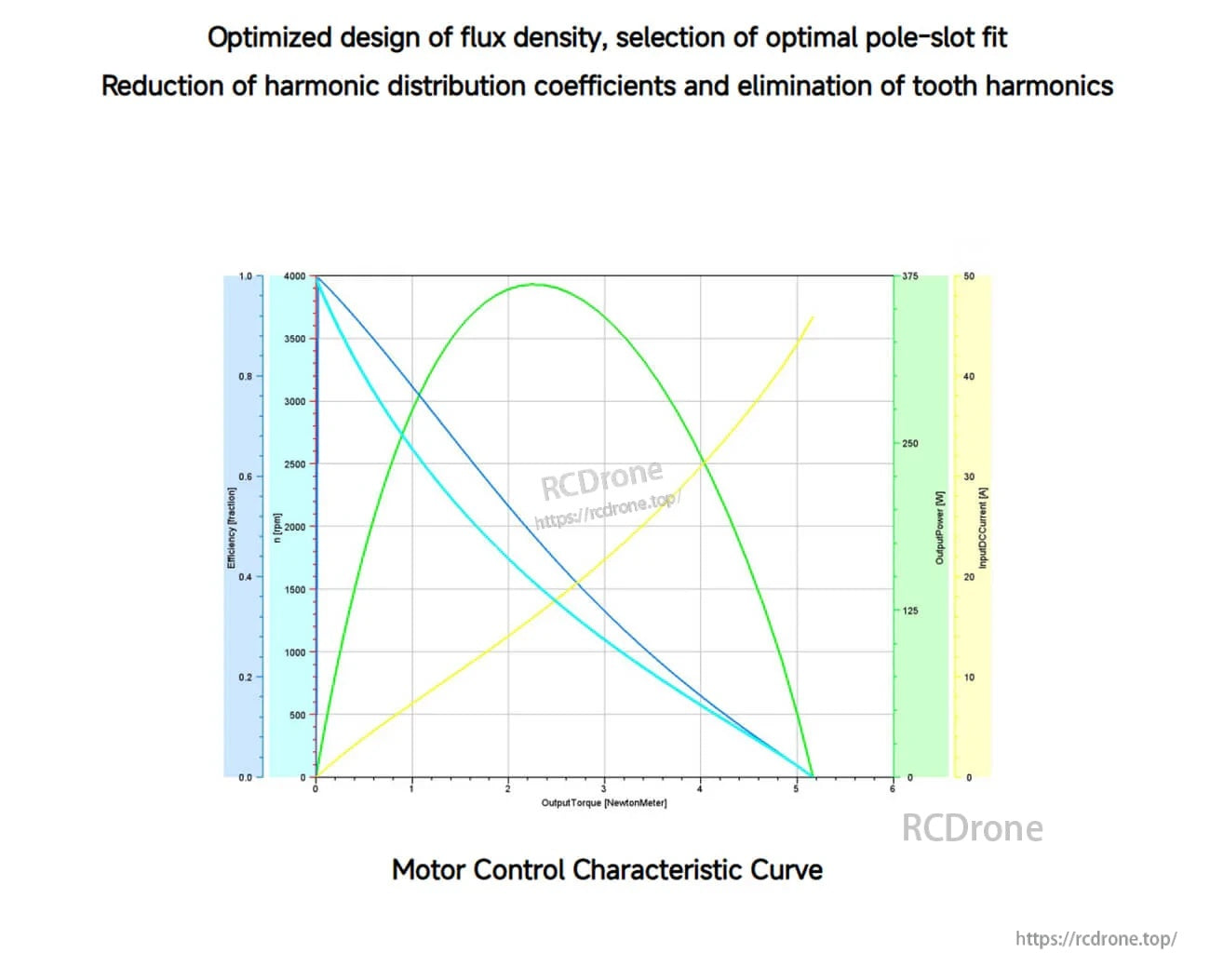
Kontrol karakteristik eğrileri, robot tasarımınızdaki tork gereksinimlerini hız ve akım limitleri ile eşleştirmek için hızlı bir referans sağlar.
Related Collections




