MATEK CAN-L4-BM - Mateksys AP_PERIPH CAN DİJİTAL GÜÇ MONİTÖRÜ
MATEK CAN-L4-BM - Mateksys AP_PERIPH CAN DİJİTAL GÜÇ MONİTÖRÜ
MATEKSYS
Teslim alım stok durumu yüklenemedi
MATEK CAN-L4-BM - Mateksys AP_PERIPH CAN DİJİTAL GÜÇ MONİTÖRÜ ÖZELLİKLERİ
Kullanım: Araçlar ve Uzaktan Kumandalı Oyuncaklar
Tavsiye Edilen Yaş: 12+y,14+y
Menşei: Anakara Çin
Malzeme: Kompozit Malzeme
Marka Adı: MATEKSYS
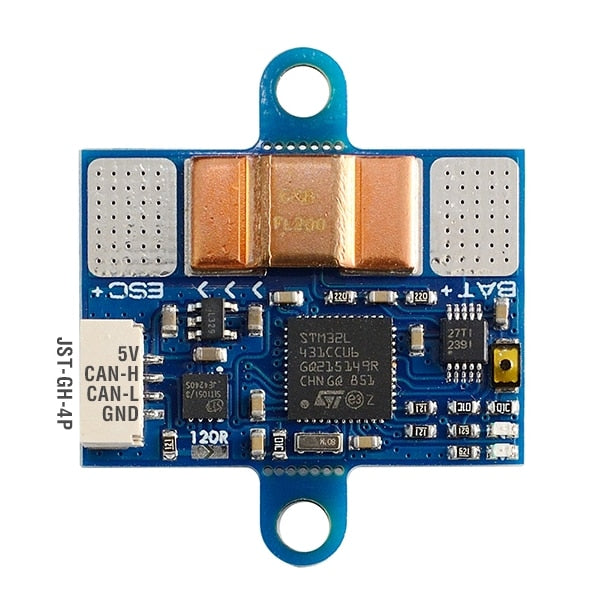
AP_PERIPH CAN DİJİTAL GÜÇ MONİTÖRÜ, CAN-L4-BM
Akım 0~204,8A, Gerilim 0~85V, CAN/DroneCAN protokolü
-
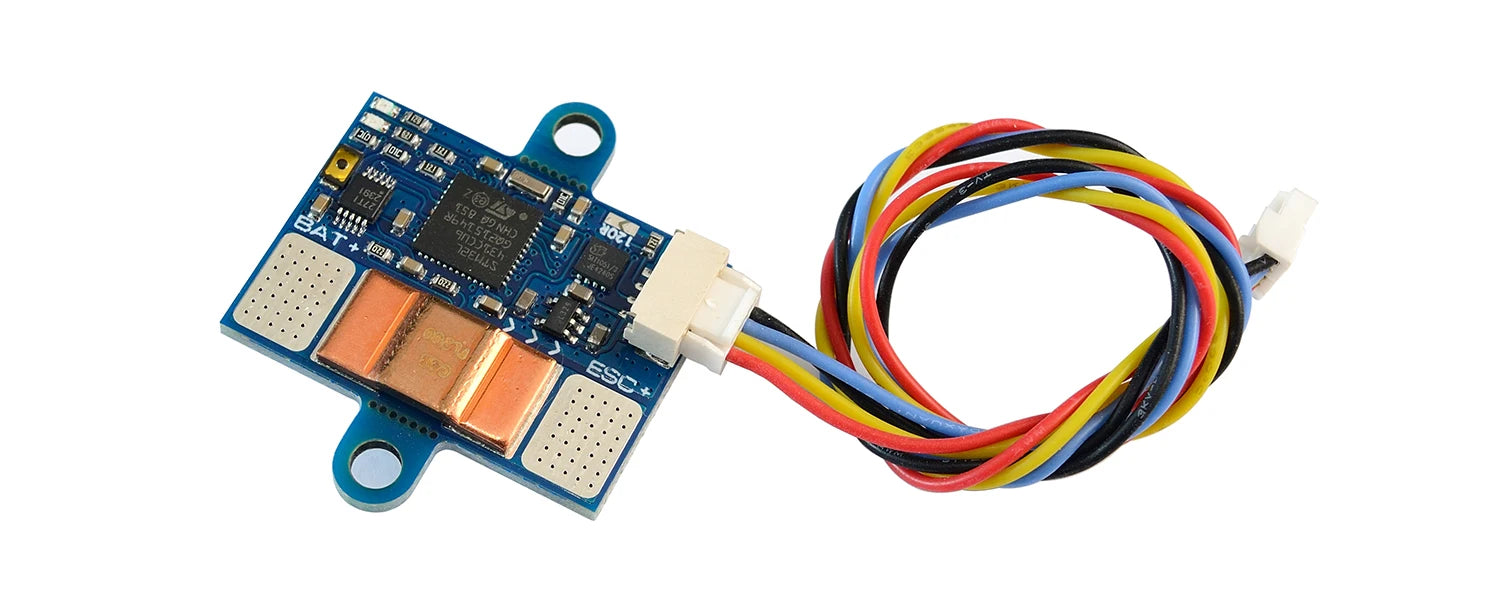
CAN-L4-BM, TI INA239 ve ArudPilot AP_Periph donanım yazılımını temel alan ultra hassas bir dijital güç monitörüdür.
-
Bu iletken yolun direnci tipik olarak 200 μΩ olup, uygulamada düşük güç kaybı sağlar.
-
Bu cihazla, Kalibrasyon gerekmez, DroneCAN protokolünü destekleyen uçuş kontrol cihazı, CAN veri yolu üzerinden kolayca doğru akım ve veri yolu voltajı okumaları alabilir.
Teknik Özellikler
-
MCU: STM32L431xC, 256KB Flaş
-
INA239 85-V, 16-Bit, SPI Arayüzlü Yüksek Hassasiyetli Güç monitörü IC
-
Akü Gerilimi algılama girişi: 0~85V
-
Akım Algılama Aralığı: 0~204,8A
-
Akım algılama direncindeki yük akımı: 150A(Sürekli), 204,8A(Seri)
-
Gerilim doğruluğu: ± %0,1
-
Akım doğruluğu: ± %2
-
Arayüz
-
CAN, DroneCAN Protokolü
-
UART2, yedek, DFU
-
ST hata ayıklama, SWCLK ve SWDIO
-
-
LED
-
Mavi, Hızla yanıp sönüyor, Önyükleniyor
-
Mavi, Yavaş yanıp sönüyor, çalışıyor
-
Kırmızı, 3,3V gösterge
-
CAN-L4-BM kartı için güç kaynağı: 4,5~5,5V @5V ped/pin
-
Güç tüketimi: 10mA
-
Çalışma Sıcaklıkları: -40~85 °C
-
Fiziksel
-
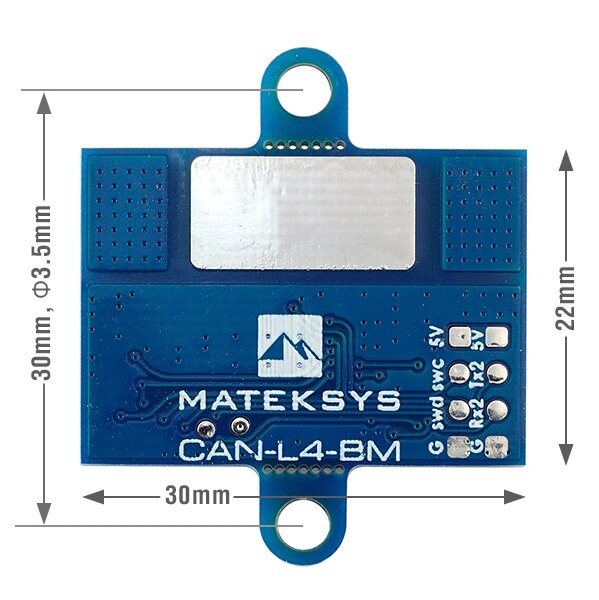
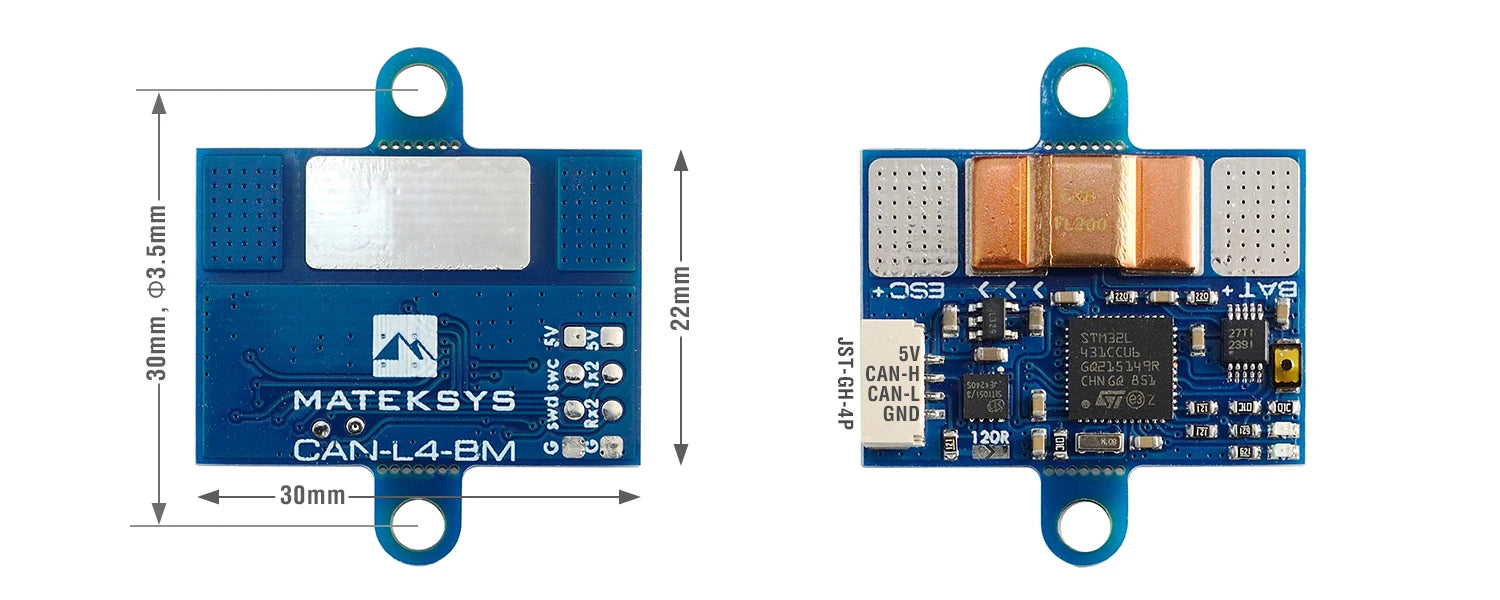
Kart Boyutu: 30mm*22mm*3mm. 4g
-
3D dosya : CAN-L4-BM_STEP.zip
-
-
Bellenim
-
ArduPilot AP_Periph MatekL431-BattMon
-
DroneCAN GUI Aracıyla Güncelleme
-
-
Parametreler
-
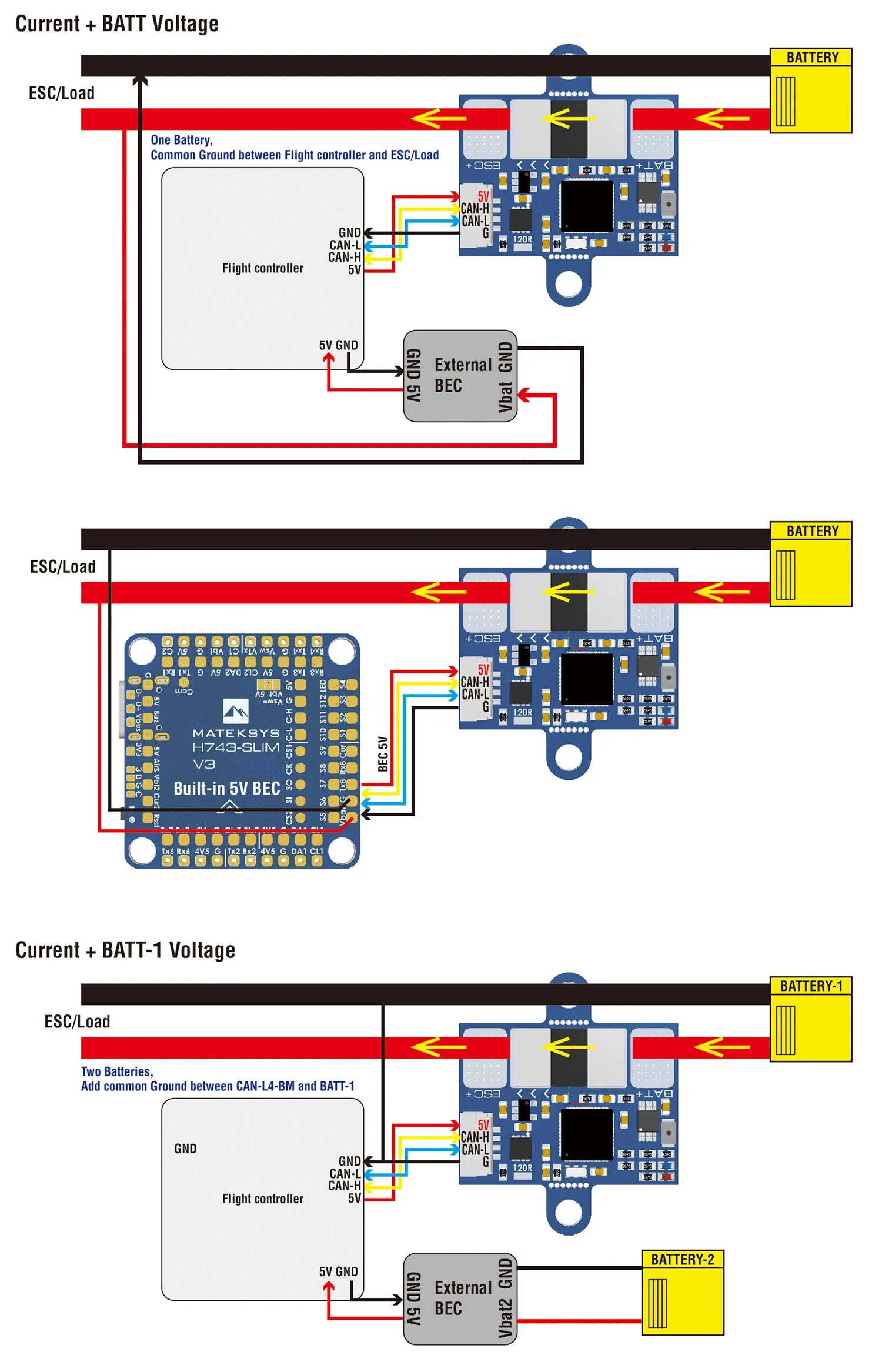
CAN bus1 bağlantı noktasına bağlıysa CAN_P1_DRIVER = 1 veya CAN bus2 bağlantı noktasına bağlıysa CAN_P2_DRIVER = 1
-
BATTx_MONITOR = 8 (DroneCAN-BatteryInfo)
-
Ambalaj
-
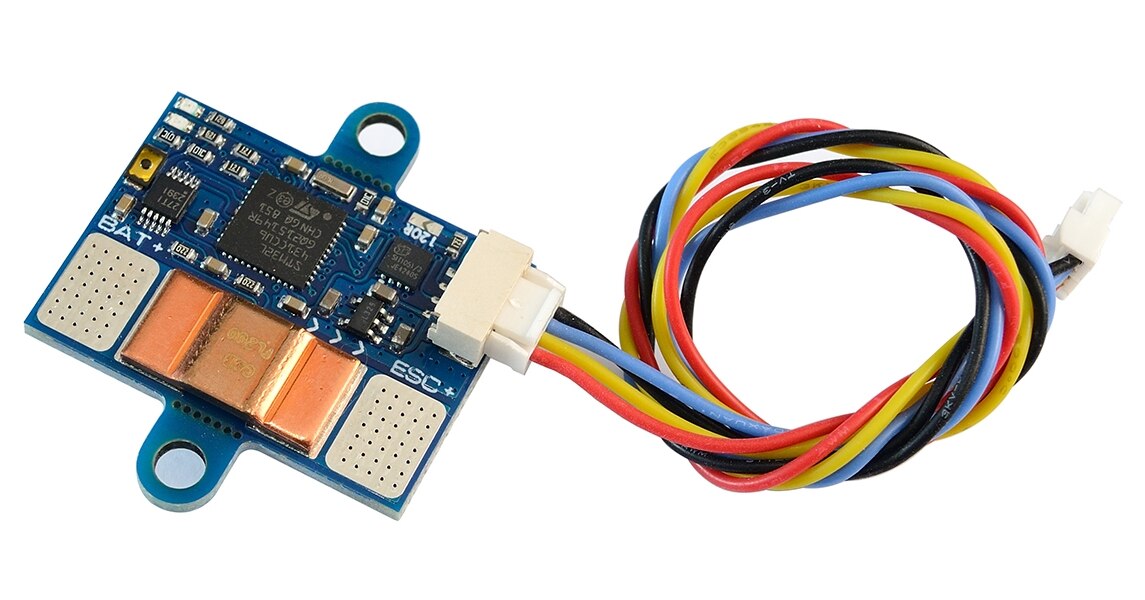
1x CAN-L4-BM kartı
-
1x JST-GH-4P - JST-GH-4P 20cm silikon tel
İpuçları
-
Alt taraftaki büyük ped ölü bir pedtir. Üzerinde herhangi bir devre ağı yok.
-
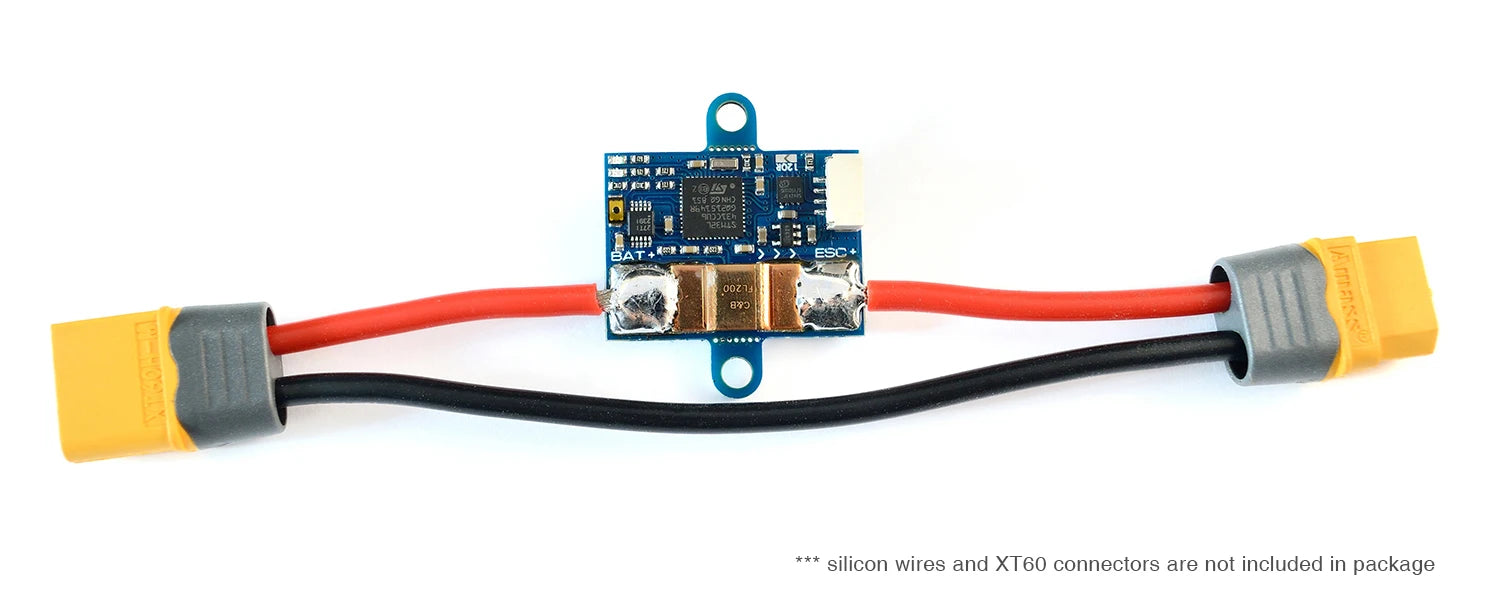
Pozitif kabloları akım algılama direncinin her iki tarafına mümkün olduğunca yakın lehimleyin.
-
İhtiyacınız yoksa montaj için 2 kulak kesilebilir.
-
CAN kabloları çok uzunsa “120R” atlama kablosunu köprüleyin.
Related Collections