MATEK M10-L4-3100 GPS Modülü - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
MATEK M10-L4-3100 GPS Modülü - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
MATEKSYS
Teslim alım stok durumu yüklenemedi
MATEK M10-L4-3100 - Mateksys AP_PERIPH GNSS ÖZELLİKLERİ
Kullanım: Araçlar ve Uzaktan Kumandalı Oyuncaklar
Tavsiye Edilen Yaş: 12+y,14+y,6-12y
Menşei: Anakara Çin
Malzeme: Kompozit Malzeme
Marka Adı: MATEKSYS
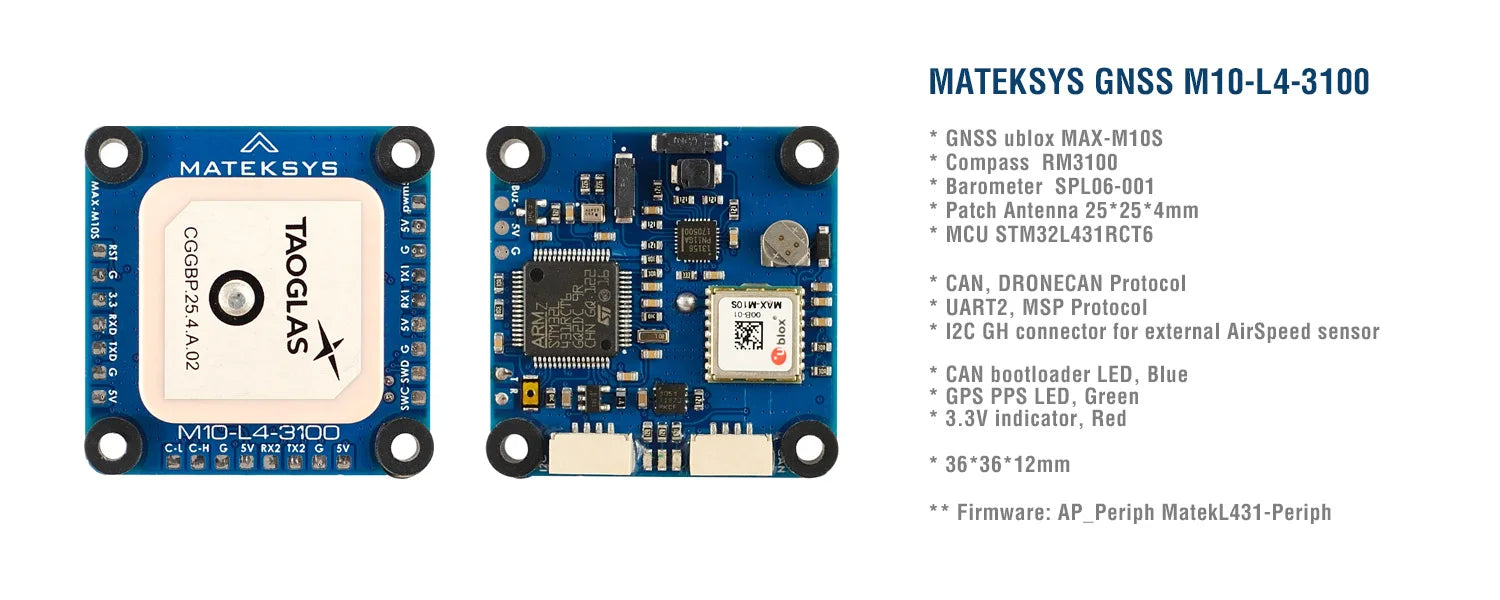
AP_PERIPH GNSS M10-L4-3100
AP_Periph L431 CAN düğümü, MAX-M10S, RM3100, SPL06-001, DroneCAN protokolü ve UART_MSP
-
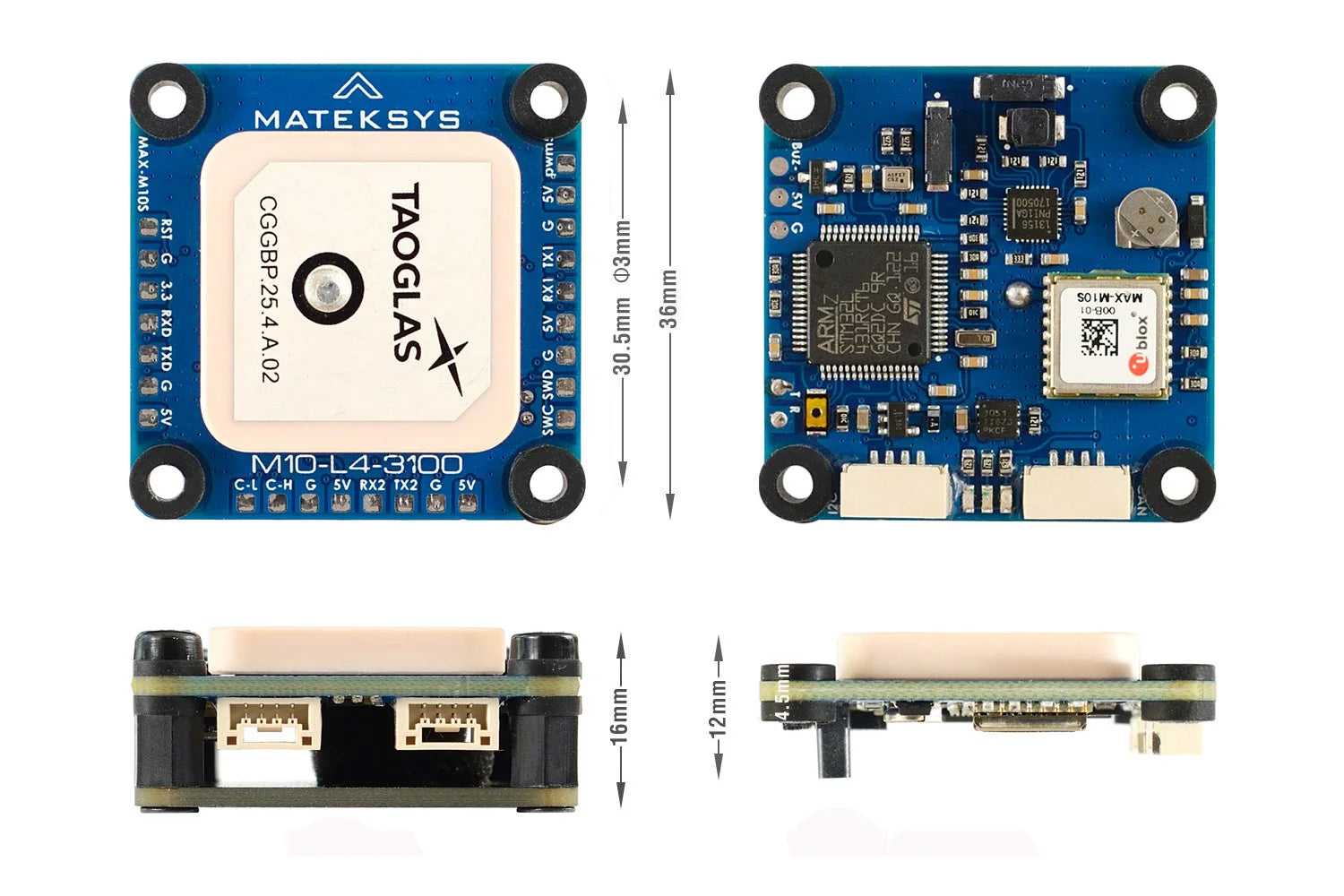
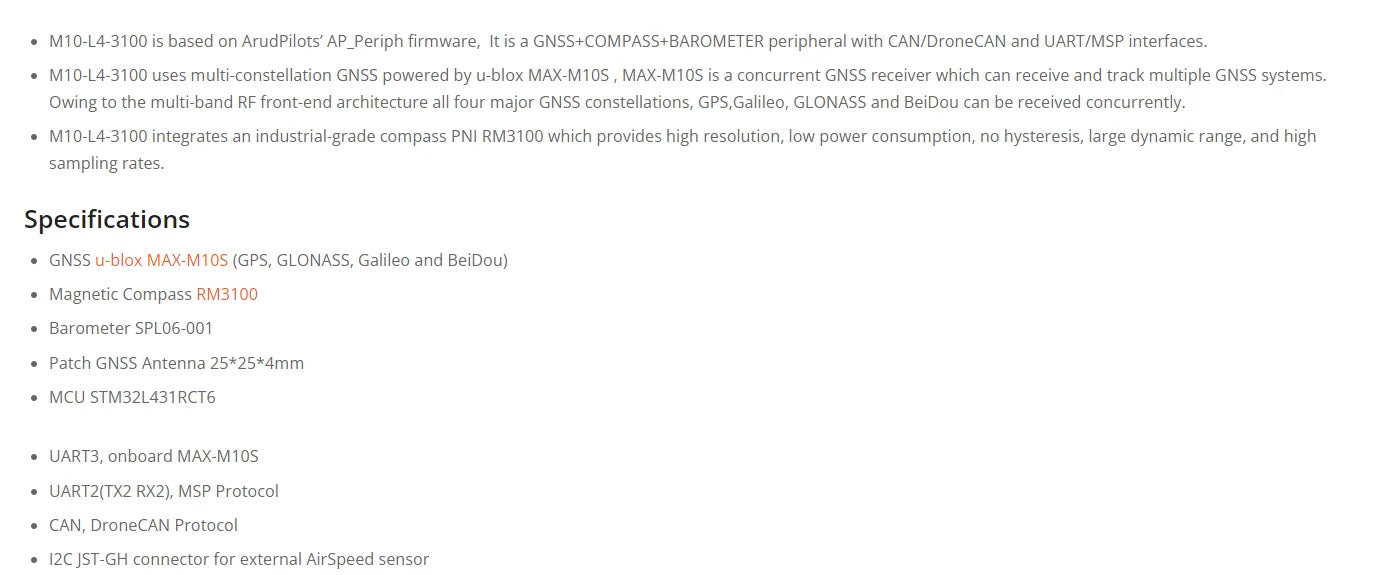
M10-L4-3100, ArudPilots'un AP_Periph donanım yazılımını temel alır, CAN/DroneCAN ve UART/MSP arayüzlerine sahip bir GNSS+COMPASS+BAROMETER çevre birimidir.
-
M10-L4-3100, u-blox MAX-M10S tarafından desteklenen çoklu takımyıldızı GNSS'yi kullanır, MAX-M10S, birden fazla GNSS sistemini alabilen ve izleyebilen eşzamanlı bir GNSS alıcısıdır. Çok bantlı RF ön uç mimarisi sayesinde dört ana GNSS takımyıldızının tümü, GPS, Galileo, GLONASS ve BeiDou aynı anda alınabilir.
-
M10-L4-3100, yüksek çözünürlük, düşük güç tüketimi, gecikme yok, geniş dinamik aralık ve yüksek örnekleme oranları sağlayan endüstriyel sınıf bir pusula PNI RM3100'ü entegre eder.

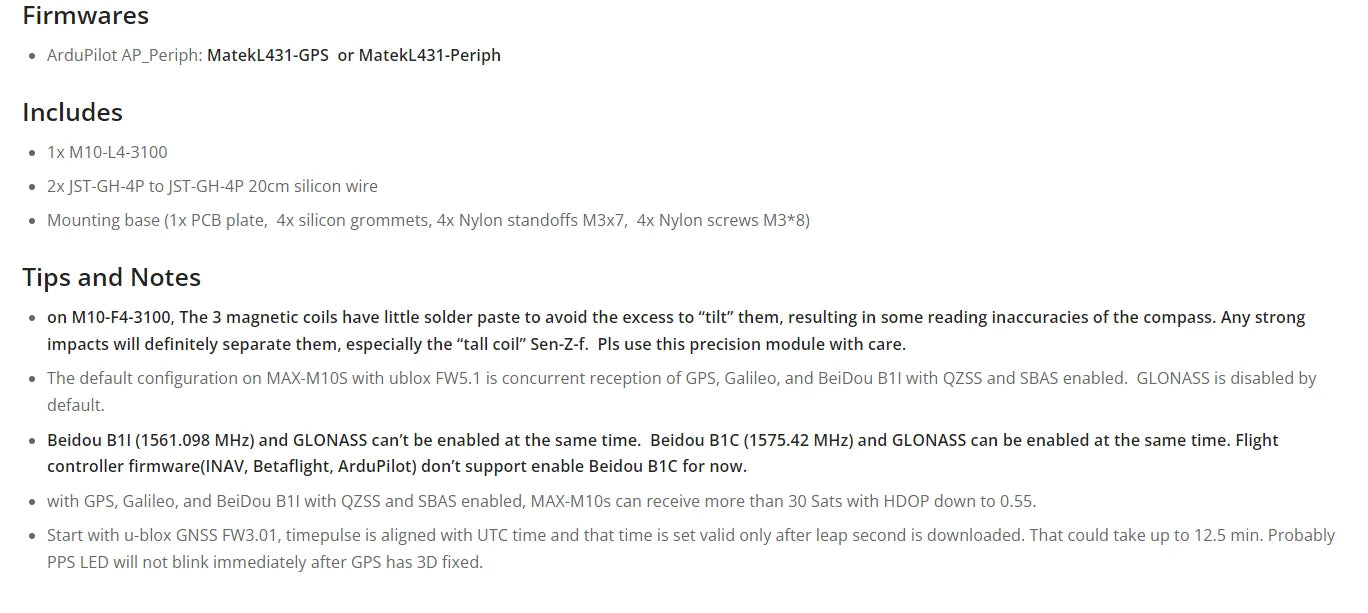
ublox FWS'li MAX-M1OS'ta varsayılan yapılandırma. QZSS ve SBAS etkinken GPS, Galileo ve BeiDou BI'nın eş zamanlı alımıdır. GLONASS, Beidou B1I (1575,42 MHz) varsayılan olarak devre dışıdır ve aynı anda etkinleştirilemez.
CAN (UAVCAN protokolü) Bağlantısı
-
M10-L4-3100 5V — FC 4,5V ~ 5.3V
-
M10-L4-3100 CAN-H — FC CAN Yüksek
-
M10-L4-3100 CAN-L — FC CAN Düşük
-
M10-L4-3100 G — FC G/GND
FC İHACAN Parametreleri(ArduPilot)
-
CAN_D1_PROTOCOL -> 1
-
CAN_P1_DRIVER -> 1
-
GPS_TYPE -> 9 (DroneCAN)
-
COMPASS_TYPEMASK -> 0 (DroneCAN'ın İşaretlenmediğinden emin olun)
——————————————————————–
I2C hava hızı sensörünü M10-L4-3100'ün I2C bağlantı noktasına bağlarsanız
-
ARSPD_TYPE -> 8 (UAVCAN)
-
ARSPD_USE -> 1
Ve M10-L4-3100'ün I2C bağlantı noktasına bağlı hava hızı sensörü için CAN Düğümü parametrelerini ayarlamanız gerekir
Görev Planlayıcı > Başlangıç Kurulumu > İsteğe Bağlı Donanım > UAVCAN > SLCan Modu CAN1 > Parametreler
-
MS4525 ARSP_TYPE -> 1 (hwdef'te varsayılan)
-
MS5525 ARSP_TYPE -> 3 yalnızca 0x77 adresli MS5525'i destekler
-
SDP3X ARSP_TYPE -> 6
-
DLVR-L10D ARSP_TYPE -> 9
-
Yaz ve yeniden başlat
——————————————————————–
2812LED DIN'i PWM5 pad'e bağlarsanız
-
NTF_LED_TYPES -> (DroneCAN'ın işaretlendiğinden emin olun)
SLCan Modu CAN1 > Parametreler
-
OUT5_FUNCTION 120
-
NTF_LED_TYPES 455
-
AP_Periph fw, “MatekL431-Periph” olmalıdır, MSP özelliği “MatekL431-GPS”te devre dışıdır
UART (MSP protokolü) Bağlantısı
-
M10-L4-3100 5V — FC 4,0V ~ 5,3V
-
M10-L4-3100 TX2 — FC yedek UART_RX
-
M10-L4-3100 RX2 — FC yedek UART_TX (gerekli değil)
-
M10-L4-3100 G — FC G/GND
ArduPilot (4.1.x'ten beri) FC Parametreleri
-
Serialx_PROTOCOL = 32 (MSP) burada x, otomatik pilotta bağlantı için kullanılan SERİ bağlantı noktasıdır.
-
Serialx_BAUD = 115 burada x, otomatik pilotta bağlantı için kullanılan SERİ bağlantı noktasıdır.
-
GPS TİPİ = 19 (MSP)
-
BARO_PROBE_EXT = 4096 (MSP Baro)
-
BARO_PRIMARY = 1 (MSP baro'yu birincil baro olarak kullanmak istiyorsanız, aksi halde varsayılan olarak bırakın)
-
COMPASS_TYPEMASK 0 (veya MSP bitinin işaretli olmadığından emin olun)
INAV (2.6'dan beri) FC Parametreleri
-
M10-L4-3100, yedek UART üzerinden INAV tarafından desteklenen herhangi bir uçuş kontrol cihazıyla uyumludur.
-
Bağlantı noktaları sekmesinde, M10-L4-3100'ün bağlandığı ilgili UART'ta MSP'yi etkinleştirin, söz konusu UART'ta "GPS"i ETKİNLEŞTİRMEYİN. Baud hızı 115200 seçeneğini seçin.
-
GPS özelliği
-
gps_provider = MSP'yi ayarla
-
mag_hardware'i ayarla = MSP
-
baro_hardware'i ayarla = MSP
-
align_mag = C'yi ayarlayınW90, eğer pusula, ok ileri bakacak şekilde düz monte edilmişse ve uçuş kontrol cihazının oku da ileriye dönükse.
Related Collections