

MUWEIDU L6020 Motor 24V 200rpm Servo Motor, 18-bit Enkoderli, RS485/CAN, 0.58N.m Nominal Tork
MUWEIDU L6020 Motor 24V 200rpm Servo Motor, 18-bit Enkoderli, RS485/CAN, 0.58N.m Nominal Tork
MUWEIDU
Teslim alım stok durumu yüklenemedi
Genel Bakış
MUWEIDU L6020 Motor, hız/konum kontrolü için tasarlanmış düşük hızlı, yüksek hassasiyetli fırçasız DC servo motor 'dur. 18-bit tek dönüşlü mutlak enkoderi entegre eder ve stabil, pürüzsüz çalışma gerektiren robotik ve otomasyon sistemleri için CAN veya RS485 iletişimini destekler. Ürün seçimi veya teknik destek için iletişime geçin [email protected] or ziyaret edin https://rcdrone.top/.
Temel Özellikler
- Düşük hız & yüksek hassasiyetli fırçasız DC motor serisi
- Boş mil tasarımı
- Stabil & pürüzsüz çalışma
- Entegre yüksek hassasiyet; hafif yapı; yüksek tork performansı
- Düşük hız ve yüksek hassasiyetli konum kontrolü gereksinimlerini karşılar
- Motor çekirdek malzemeleri: premium silikon çelik levhalar ve yüksek sıcaklığa dayanıklı yüksek performanslı mıknatıslar
- Daha yüksek tork için dış rotor çok aşamalı düzleştirilmiş tasarım, alan kısıtlı uygulamalar için
- Fırçasız yapı, daha pürüzsüz döngü ve daha uzun hizmet ömrü için yüksek performanslı yataklarla birleştirilmiştir
- Doğru akım örnekleme ve kontrolü için yüksek hassasiyetli, düşük sıcaklık kayması olan alaşım dirençler
- Düşük iç direnç ve yüksek akım çıkışı ile tam N-kanallı üç fazlı tam köprü sürüş
- Tork açık döngü, hız ve konum kontrol modları arasında kesintisiz geçişi destekler
- Ana kontrol: 72 MHz çalışma frekansına sahip 32-bit MCU
- Giriş voltajı: 12~60 V (sürücü)
- Tek seferlik kalibrasyon, sıfır konumu asla kaybolmaz
- CE Sertifikalı (belirtilen şekilde)
Özellikler
| Model | L6020 |
| Nominal Voltaj | 24V |
| Nominal Akım | 1.4A |
| En Yüksek Güç | 12.6W |
| Nominal Tork | 0.58N.m |
| En Yüksek Tork | 1.4N.m |
| Değerlendirilen Hız | 200rpm |
| Encoder | 18bit |
| Rotor Ataleti | 394gcm² |
| Motor Sıcaklık İzleme | EVET |
| Kontrol Modları | Hız/Pozisyon |
| İletişim Protokolü | RS485 veya CAN |
| Genel Boyutlar | Φ58mm×21mm |
| Ağırlık | 185g |
Arayüz Tanımı
- ID SWITCH
- CAN/RS485
- B/L: RS485-B veya CAN-L
- A/H: RS485-A veya CAN-H
- V-: Negatif Güç Kaynağı
- V+: Pozitif Güç Kaynağı
- T: UART Verici
- R: UART Alıcı
- G: Sinyal GND
Uygulama Senaryoları
- İnsansı Robotlar
- Robot Kolları
- Ekoskeletonlar
- Dört Ayaklı Robotlar
- AGV Araçları
- ARU Robotları
- 360° Kamera
- Taşınabilir Kamera
- LiDAR
- Gimbal
PC Yazılımı / Kontrol Modları (belirtilen şekilde)
PC tabanlı parametre ayarı / test / yazılım güncellemesi mevcuttur.Açık kaynak geliştirme platformlarıyla uyumlu, PC, MCU, PLC, endüstriyel bilgisayar ve Raspberry Pi dahil.
- Moment Modu
- Hız Modu
- Çok Dönüş Kontrol Modu
- Tek Dönüş Pozisyon + Yön Modu
- Artımlı Pozisyon Modu
- Çok Dönüş Kontrol Modu (hız limiti ile)
- Tek Dönüş Pozisyon + Yön Modu (hız limiti ile)
- Artımlı Pozisyon Modu (hız limiti ile)
Kılavuzlar / Dosyalar
Ayrıntılar

Düşük hızda, yüksek hassasiyetli hareket kontrolü için kompakt boş mil form faktörü ile tasarlanmıştır.

Temel yapı, stabil pozisyonlama performansı için düzgün dönüş ve doğru akım kontrolüne odaklanmaktadır.
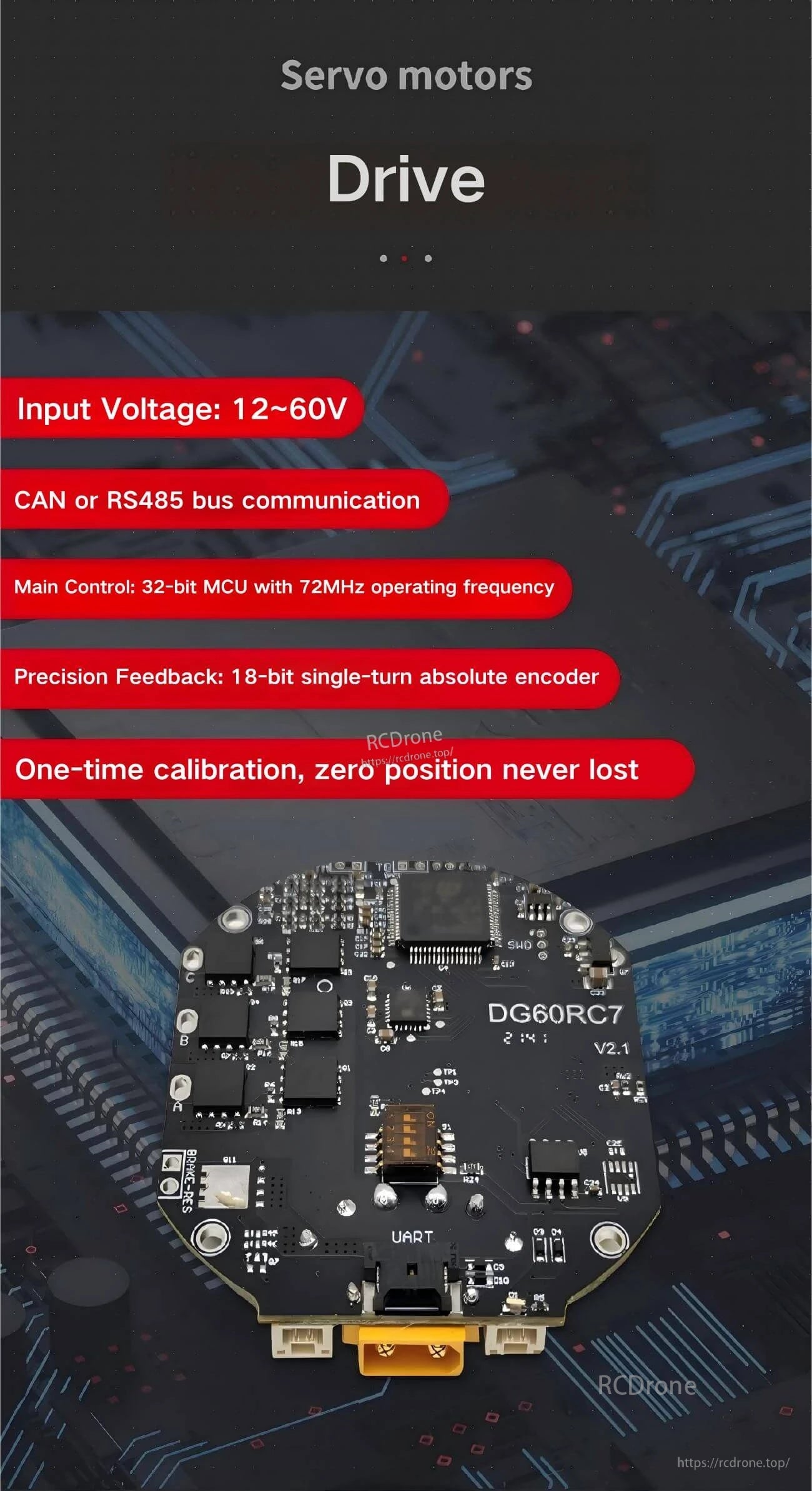
Yerleşik sürücü elektroniği, 18-bit mutlak enkoder geri bildirimi ile CAN veya RS485 veri yolu kontrolünü destekler.

Açık arayüz etiketleri, güç, UART ve CAN/RS485 bağlantılarını doğru bir şekilde kablolamaya yardımcı olur.
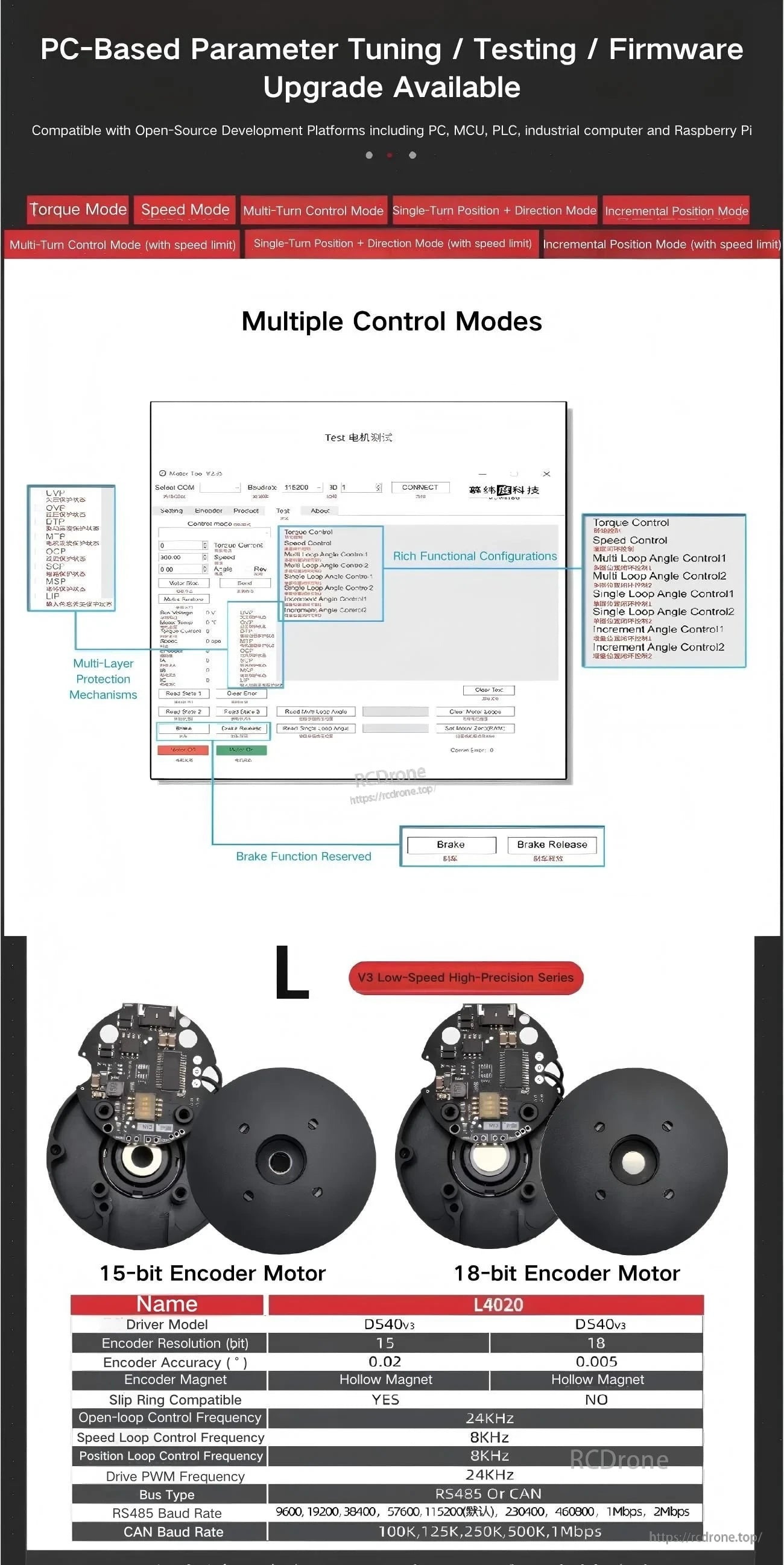
PC yazılımı, tork, hız ve konum kontrol modları arasında parametre ayarlama, test etme ve yazılım güncellemeleri yapma imkanı sunar.
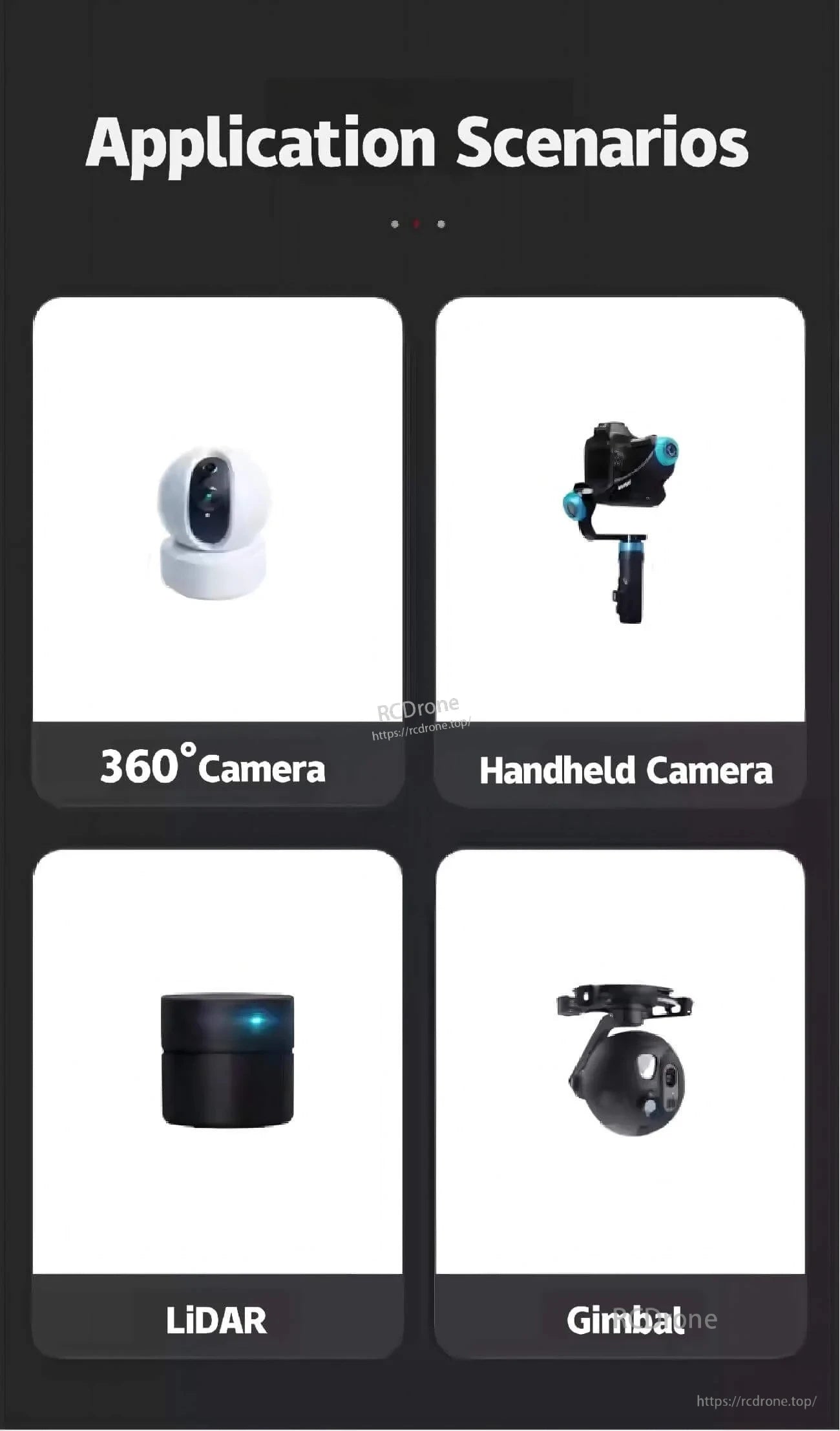
Gimbal, 360° kameralar ve LiDAR modülleri gibi kompakt mekatronik yapılar için pratik bir uyum sağlar.
Related Collections

