






MyActuator RMD-X4-10 Planet Dişli Aktüatör 10N·m Çift Enkoder EtherCAT+CAN Robot Eklem Sürücüsü
MyActuator RMD-X4-10 Planet Dişli Aktüatör 10N·m Çift Enkoder EtherCAT+CAN Robot Eklem Sürücüsü
MyActuator
Teslim alım stok durumu yüklenemedi
Genel Bakış
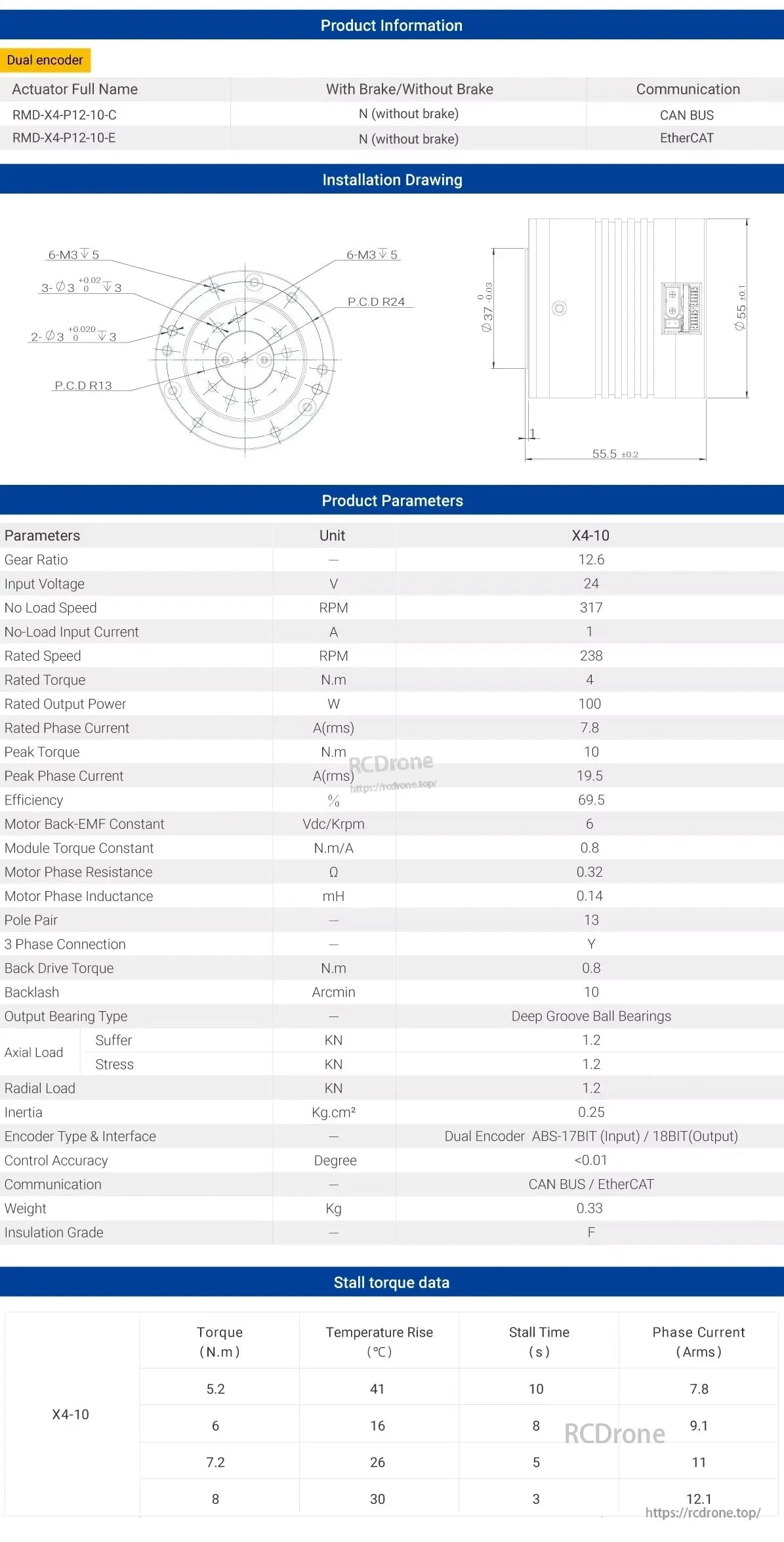
MyActuator RMD-X4-10 gezegen aktüatörü, ileri düzey robotik uygulamalar için tasarlanmış yüksek performanslı bir DC motor eklem modülüdür. 12.6:1 gezegen dişli oranı, 10N·m zirve tork ve 100W nominal çıkış gücü ile donatılmıştır; çift encoder sistemi (17-bit giriş / 18-bit çıkış) entegre edilmiştir ve 0.01° hassasiyet kontrolü sunmaktadır. Büyük boşluklu yapısı, çoklu sensör entegrasyonunu destekleyerek insansı robotlarda tam vücut duruş kontrolü için merkezi bir hub sağlar. EtherCAT ve CAN çift protokol iletişimi ile aktüatör, 250μs ultra hızlı yanıt elde eder, bu da onu insansı robotlar, biyonik bacak sürücüleri ve endüstriyel otomasyon gibi yüksek dinamik, yüksek güvenilirlik senaryoları için ideal hale getirir.
Ana Özellikler
-
Yüksek Hassasiyetli Çift Encoder: 17-bit giriş / 18-bit çıkış ile 0.01° hassasiyet
-
Tepe Torku 10N·m 12.6:1 planet dişli oranı ile
-
Çapraz Rulman: Stabil robotik eklemler için olağanüstü anti-bükülme momenti kapasitesi
-
EtherCAT + CAN Bus Çift İletişim: Çoklu makine bağlantısını destekler, ultra hızlı 250μs yanıt süresi
-
Büyük Boş Yapı: Karmaşık robotik sistemler için sensörlerin, kabloların ve kayma halkalarının entegrasyonunu sağlar
-
Yüksek Güvenilirlik: İnsan benzeri yürüyüş kontrolü için tasarlanmıştır, koşma, zıplama ve karmaşık hareketler için pürüzsüz geçişler
-
Kompakt & Hafif: Φ55mm × 55.5mm, ağırlık 0.33kg
Özellikler
| Parametre | Değer |
|---|---|
| Model | RMD-X4-10 |
| Dişli Oranı | 12.6:1 |
| Giriş Voltajı | 24V DC |
| Nominal Hız | 238 RPM |
| Boşta Hız | 317 RPM |
| Nominal Çıkış Gücü | 100W |
| Nominal Tork | 4N·m |
| Zirve Tork | 10N·m |
| Nominal Akım | 7.84A |
| Yük Olmadan Akım | 1A |
| Encoder Tipi | Çift Encoder (ABS-17bit / 18bit) |
| İletişim | EtherCAT + CAN Bus |
| Ağırlık | 0.33kg |
| Boyut | Ø55mm × 55.5mm |
Uygulamalar
-
İnsansı Robotlar – Kollar, bacaklar ve gövde için eklem sürücüleri
-
Biyonik Bacak Sürücüleri – Koşma ve zıplama yürüyüşleri için yüksek torklu, bükülmeye karşı tasarım
-
İşbirlikçi Robotlar – Endüstriyel otomasyon için pürüzsüz hareket kontrolü
-
Ekzo iskeletler – İnsan destekleyici cihazlar için hafif, yüksek dinamik aktüatörler
-
Esnek Üretim Hatları – EtherCAT yüksek hızlı iletişim ile çok eksenli senkronizasyon
Paketleme & Aksesuarlar
-
Güç Kaynağı + CAN Bus İletişim Kablosu ×1
-
120Ω Terminal Direnci ×1
EtherCAT İletişim Kablosu ×2
-
CAN Bus İletişim Modülü ×1 (Her sipariş için USB-CAN adaptörü dahildir)
Paketleme Boyutları: 100mm × 100mm × 70mm
Ayrıntılar

RMD-X4-PT2.5-10-C çift kodlayıcı robot eklem sürücüsü, 24V giriş, 12.6 dişli oranı, 4N·m tork ve 100W çıkış ile donatılmıştır. Özellikleri arasında CAN BUS/EtherCAT arayüzü, 317RPM boş yük hızı ve 0.28kg ağırlık bulunmaktadır. Montaj boyutları ve teknik özellikler içerir.

10N.m tepe torkuna, 12.6:1 dişli oranına ve 0.33kg ağırlığa sahip gezegen aktüatörü. Boyut: Ø55mm×55.5mm. EtherCAT/CANBUS iletişimi, çift kodlayıcı, yüksek hızlı MCU, CAN çipleri ve derin oluklu bilyalı rulmanlar ile donatılmıştır.

Çift Kodlayıcı ABS-17BIT Giriş / 18BIT Çıkış, X4-10, SN:40225621, MYACTUATOR

MYACTUATOR'ın RMD-X4-10 Gezegen Aktüatörü, 100W güç, 46Nm tork, çift kodlayıcı ve 238rpm hız sunmaktadır. Güç + CAN BUS kablosu, 120Ω direnç, EtherCAT kablosu, CAN BUS modülü ve ücretsiz USB-CAN adaptörü ile birlikte gelir.
RMD-X4-10 Robotik Gezegen Aktüatörü, çift kodlayıcıya sahiptir, 12.6 dişli oranı, 24V giriş, 100W çıkış ve CAN BUS/EtherCAT. 4N.m tork, 238 RPM hız sunar, 0.33kg ağırlığındadır ve yüksek verimlilik için derin oluklu bilyalı yataklar kullanır.

X4-10 arayüzü güç, CAN ve EtherCAT portlarını içerir. Ambalaj, güç kaynağı, kablolar, dirençler ve modül içerir. Boyutlar: 100x100x70mm. Her siparişle birlikte USB-CAN adaptörü dahildir.

X4-10 aksesuarları güç kaynağı, CAN BUS ve EtherCAT kabloları, terminal direnci ve bir CAN BUS modülü içerir. Detaylar, konnektörler, tel fonksiyonları, sinyal hatları ve USB-CAN adaptör notlarını kapsar.
Related Collections






