





MyActuator RMD-X4-36 34N·m Planet Dişli Aktüatör DC Fırçasız Motor, Çift Enkoderli, EtherCAT & CAN Bus, 36:1 Dişli Oranı
MyActuator RMD-X4-36 34N·m Planet Dişli Aktüatör DC Fırçasız Motor, Çift Enkoderli, EtherCAT & CAN Bus, 36:1 Dişli Oranı
MyActuator
Teslim alım stok durumu yüklenemedi
Genel Bakış
MyActuator RMD-X4-36 Planetary Actuator DC Fırçasız Motor, hassas hareket kontrolü, yüksek tork çıkışı ve kompakt entegrasyon gerektiren robotik ve otomasyon sistemleri için tasarlanmış yüksek performanslı bir eklem aktüatörüdür. 34N·m pik tork, 36:1 dişli oranı ve çapraz makaralı yatak yapısı ile mükemmel bükülme direnci ve dayanıklılık sunar. EtherCAT + CAN çift iletişim protokolleri ve 250μs ultra-hızlı yanıt özelliği ile bu aktüatör, insansı robotlar, robot kolları, mobil platformlar ve diğer ileri düzey robotik uygulamalar için idealdir. çift enkoder tasarımı (ABS 17-bit girişi / 18-bit çıkışı) ultra yüksek konumlandırma hassasiyetini garanti ederken, kompakt boyutu (55mm × 61mm, 0.36kg) hafif ve verimli entegrasyonu mümkün kılar.
Ana Özellikler
-
Yüksek Hassasiyetli Çift Encoder: 0.01° hassasiyet için 17-bit (giriş) + 18-bit (çıkış).
-
EtherCAT + CAN Bus Protokolleri: 250μs ultra hızlı yanıt ile esnek iletişim.
-
Çapraz Rulmanlar: Üstün anti-bükülme performansı ve uzun hizmet ömrü.
-
Yüksek Güç Yoğunluğu: Kompakt 55mm çap, 61mm uzunluk ve sadece 0.36kg ağırlık.
-
Tepe Torku 34N·m ve Nominal Tork 11.5N·m kararlı, güçlü hareket çıktısını garanti eder.
-
Yüksek Verimlilik: 100W nominal güç ile pürüzsüz FOC (Alan Yönlendirilmiş Kontrol) teknolojisi.
-
Çok Yönlü Uygulama: İnsan benzeri robotlar, dış iskeletler, manipülatörler ve otomasyon sistemleri için tasarlanmıştır.
Özellikler
| Parametre | Değer |
|---|---|
| Model | RMD-X4-P36-36-C |
| Giriş Voltajı | 24V |
| Dişli Oranı | 36:1 |
| Boşta Hız | 111 RPM |
| Boşta Akım | 0.9 A |
| Nominal Hız | 83 RPM |
| Nominal Tork | 11.5 N·m |
| Nominal Çıkış Gücü | 100 W |
| Tepe Torku | 34 N·m |
| Tepe Faz Akımı | 21.5 A (rms) |
| Kutu Çiftleri | 13 |
| Encoder Tipi | Çift Encoder ABS 17-bit (Giriş) / 18-bit (Çıkış) |
| İletişim Protokolleri | EtherCAT / CAN Bus |
| Boyut | Ø55mm × 61mm |
| Ağırlık | 0.36 kg |
Paket İçeriği
-
1 × RMD-X4-36 Planetary Aktüatör Motoru
-
1 × Güç Kaynağı + CAN Bus İletişim Kablosu
-
1 × 120Ω Terminal Direnci
-
2 × EtherCAT İletişim Kabloları
-
1 × CAN Bus İletişim Modülü (USB-CAN adaptörü)
Uygulamalar
-
İnsansı ve biyonik robotlar
-
İşbirlikçi robot kolları
-
Ekoskeletonlar ve rehabilitasyon robotları
-
Hizmet robotları ve mobil platformlar
-
Kompakt, yüksek torklu aktüatörler gerektiren hassas otomasyon sistemleri
Detaylar

34N.m pik tork, 36:1 dişli oranı ile gezegen aktüatörü, 0.36kg ağırlık, Ø55mm×61mm boyut. EtherCAT/CANBUS iletişimi, çift enkoder, yüksek hızlı MCU, CAN çipleri ve çapraz rulmanlar özelliklerine sahiptir.

RMD-X4-P36-36 motor: 24V, 10.5N.m tork, 83RPM, çift enkoder, EtherCAT+CAN BUS, 36 dişli oranı, 0.36kg, ABS-17BIT/18BIT enkoder, detaylı boyutlar dahil.

X4-36 motor, 100W, 12N.m, çift enkoder, 17BIT giriş, 18BIT çıkış, 63rpm, 1:36 dişli oranı, CAN bus arayüzü, LED gösterge.

MYACTUATOR X4-36 motor, 100W, 12N.m, çift enkoder, 83rpm, 1:36 oran. Güç kaynağı, CAN BUS kablosu, 120Ω direnç, EtherCAT kabloları ve ücretsiz USB-CAN adaptörü ile birlikte CAN BUS modülü içerir.
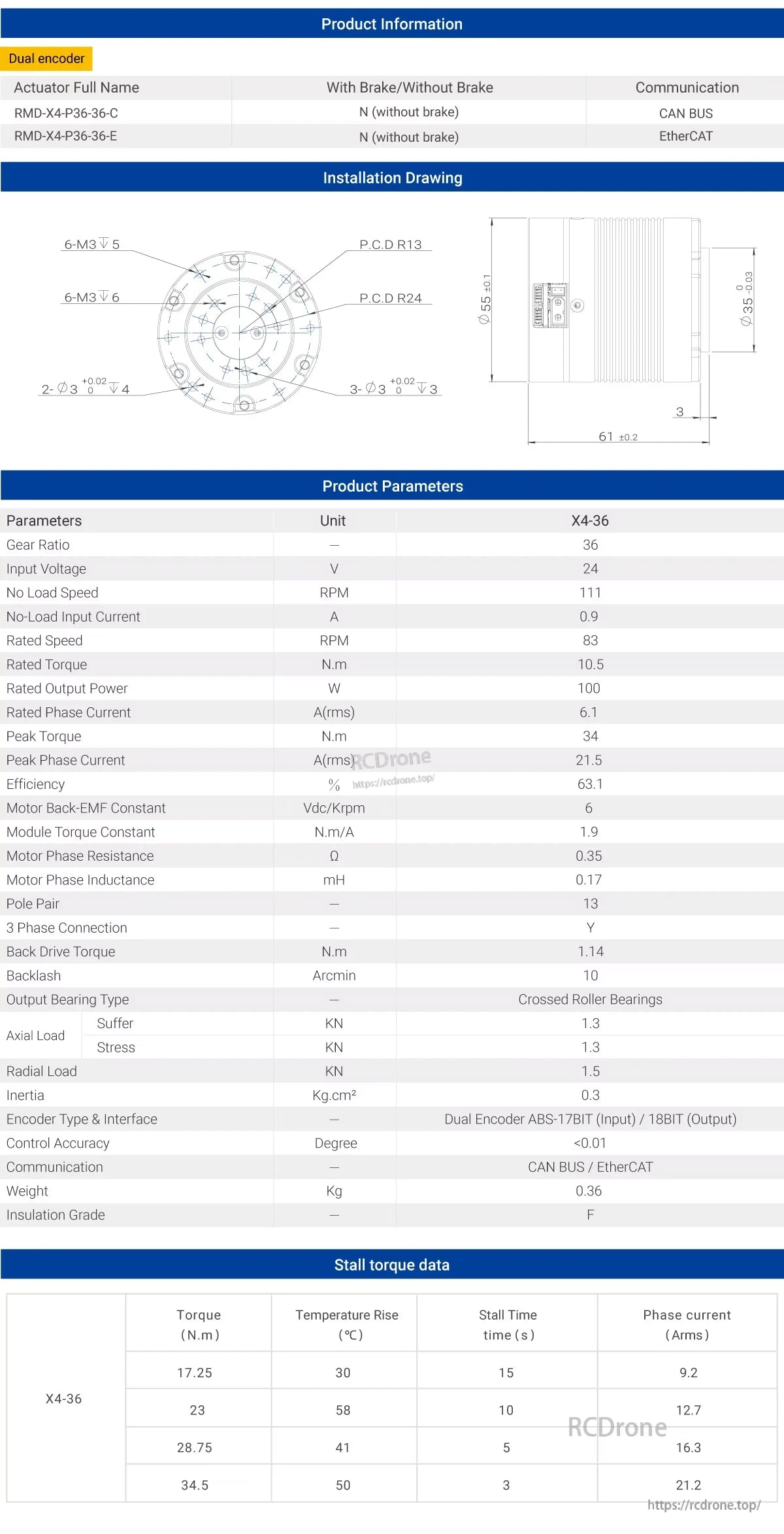
RMD-X4-P36-36 motor, çift enkoder, 36 dişli oranı, 24V giriş, 100W çıkış, CAN BUS/EtherCAT özelliklerine sahiptir. Nominal tork: 10.5 N.m, hız: 83 RPM, ağırlık: 0.36 kg. Kilitlenme torku verileri, tork, sıcaklık artışı, zaman ve faz akım değerlerini içerir.

Arayüz detayları güç, CAN ve EtherCAT portlarını içermektedir. Paketleme motor, kablolar, dirençler, iletişim modüllerini içermektedir. Boyutlar: 100x100x70mm. USB-CAN adaptörü dahildir.
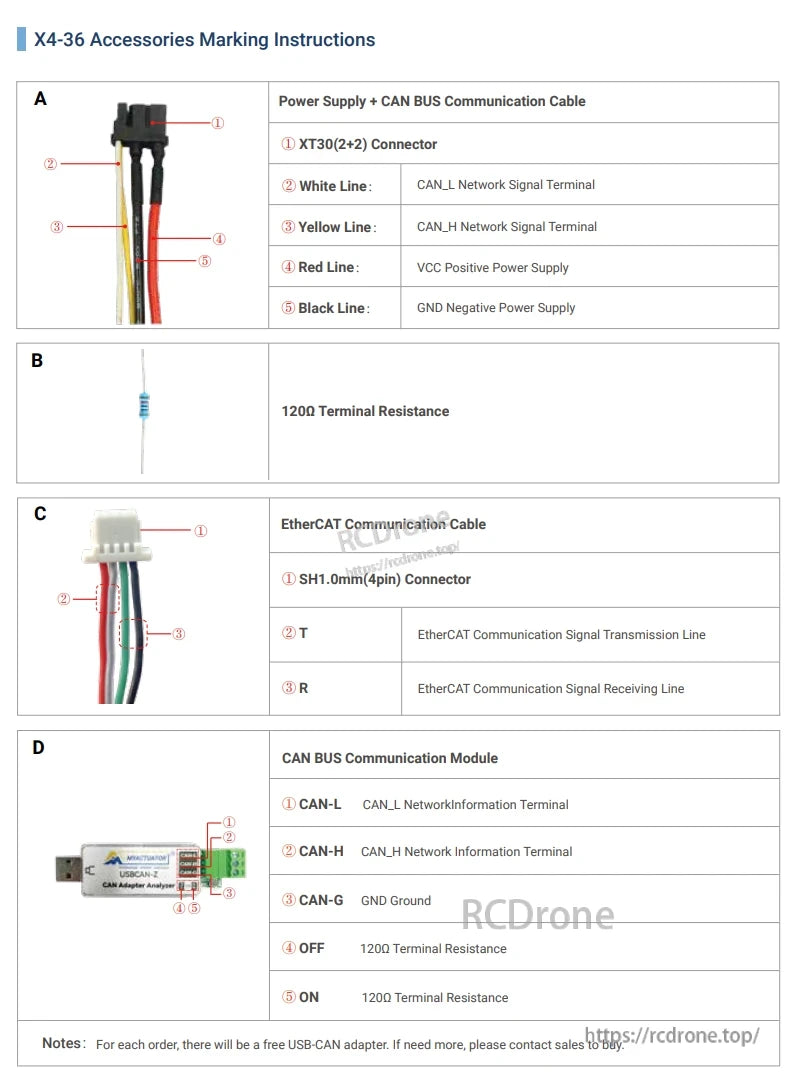
X4-36 aksesuarları güç kaynağı, CAN BUS, EtherCAT kabloları, 120Ω direnç ve CAN modülünü içermektedir. Detaylar, iletişim ve güç bağlantıları için konnektörler, tel renkleri, sinyal hatları ve terminal ayarlarını kapsamaktadır. Her siparişle birlikte USB-CAN adaptörü dahildir.
Related Collections





