




ROBOTERA XHAND 1 Robot El - 12 DoF, 270° dokunsal parmak ucu, 80N kavrama, 25 Kg kaldırma, EtherCAT/RS485, ROS uyumlu
ROBOTERA XHAND 1 Robot El - 12 DoF, 270° dokunsal parmak ucu, 80N kavrama, 25 Kg kaldırma, EtherCAT/RS485, ROS uyumlu
ROBOTERA
Teslim alım stok durumu yüklenemedi
Genel Bakış
ROBOTERA XHAND 1, tam direkt sürüş eklem modüllerine ve 12 aktif DoF'a sahip beş parmaklı bir Robot El'dir. El, insan eline uygun boyutlarda (191 mm x 94 mm x 47 mm) olup, yüksek çözünürlüklü dokunsal algılama, sağlam kavrama gücü ve robotik araştırma ve entegrasyon için geliştirici dostu arayüzlerle ustaca manipülasyon için tasarlanmıştır.
Ana Özellikler
- Entegre dişli tahrikli, kuvvet kontrollü eklem modülleri ile tam direkt sürüş mimarisi (başparmakta 3; diğer dört parmakta 9).
- 12 tamamen aktif DoF; karmaşık el içi manipülasyon için işaret parmağının yan salınımı +/-15°.
- Yüksek kavrama performansı: parmak ucu kuvveti 15N; maksimum kavrama gücü 80N; maksimum kavrama ağırlığı 25 Kg (avuç yukarı) ve 16 Kg (avuç sola).
- 2Hz'den fazla açık/kapalı tekrarı destekleyen yüksek hızlı harekete geçirme; saniyede 10 tıklama (CPS) kadar parmak tıklama gösterilmiştir.
- 270° parmak ucu dokunsal kapsama alanı, beş üç boyutlu dokunsal dizi sensörü ile; her parmak ucu için 12x10 çözünürlük x 5.
- Yüzeysel kuvvet algılama, yatay kuvvetler (X ve Y) dahil; parmak ucu tekrar konumlandırma hassasiyeti +/-0.20 mm.
- Geri sürülebilir, sönümleme <= 0.1 Nm; uyumlu etkileşim için akım döngüsü kuvvet kontrolü ve kuvvet-konum kontrolü.
- Geliştirici dostu bağlantı: EtherCAT ve RS485 (USB); ROS1/ROS2, Ubuntu (Linux), x86 ve ARM mimarileri, TwinCAT ve yaygın robot kolları (xARM, Realman, UR dahil) ile uyumlu.
- Dayanıklılık, 1.000.000 boş yük kavrama döngüsü için derecelendirilmiştir; çalışma sıcaklığı -20°C ~ 60°C.
Sorular, entegrasyon desteği veya toplu satın alma için, [email protected] or ile iletişime geçin https://rcdrone.top/.
Özellikler
| Parametre | Değer |
|---|---|
| Ağırlık | 1100 g |
| Boyutlar (U x G x Y) | 191 mm x 94 mm x 47 mm (Bir yetişkinin elinin boyutu) |
| Aktif DoF (Toplam) | 12 |
| Pasif DOF (Toplam) | 0 |
| DoF Dağılımı | Başparmak x 3; İşaret Parmağı x 3; Orta Parmak x 2; Yüzük Parmak x 2; Serçe Parmak x 2 |
| Başparmak Hareketi/İletimi | 3 dişli kontrollü kuvvet modülü |
| Dört parmak Hareketi/İletimi | 9 dişli kontrollü kuvvet modülü |
| Parmak Ucu Konfigürasyonu | Yuvarlak veya Yuvarlatılmış Parmak Uçları |
| Yanal Salınım | -15°~+15° (İşaret) |
| Parmak Ucu Tekrar Pozisyonlama Hassasiyeti | +/− 0.20 mm |
| Kontrol Modları | Konum kontrolü (düşük sönümleme/yüksek sönümleme), akım döngüsü kuvvet kontrolü, kuvvet-konum kontrolü |
| Parmak Ucu Kuvveti | 15N |
| Maksimum Kavrama Gücü (tüm el) | 80N |
| Maksimum Kavrama Ağırlığı (avuç içi sola) | 16 Kg |
| Maksimum Kavrama Ağırlığı (avuç içi yukarı) | 25 Kg |
| Başparmak En Uzak Karşıtlık | Serçe Parmak |
| Açma/Kapama Tekrar Hızı | >2Hz |
| Geri Sürüş Sönümleme (Geri Sürülebilir) | <= 0.1 Nm |
| Dokunsal Kapsama | 270° beş parmak uçlarıyla çevreleme |
| Dokunsal Sensör Sayısı | Beş parmak ucunda 270° üç boyutlu çevreleme dokunsal dizi sensörleri |
| Dokunsal Çözünürlük (tüm el) | 12x10 (her parmak ucu için 270° çevreleme) x 5 |
| Dokunsal Algılama Boyutları | Üç boyutlu kuvvet algılama (Dahil: yatay kuvvetler X ve Y) |
| Tüm El Kontrol Frekansı | 83Hz |
| İletişim Hızı | EtherCAT: 100MHz; RS485: 3MHz |
| Algılama Parametreleri | Parmak uçları: 120 üç boyutlu profil dizisi kuvvetleri; Eklem: konum, hız, sıcaklık, akım (tork) |
| Kontrol Parametreleri | Eklem pozisyonu; eklem torku; eklem sertlik katsayısı; eklem sönüm katsayısı |
| Yük olmadan Kavrama Döngüleri | 1.000.000 döngü |
| Çalışma Sıcaklığı Aralığı | -20°C ~ 60°C |
| Çalışma Voltajı | 24V ~ 72V |
| Statik Akım | 0.15A @48V, 7W |
| Maksimum Akım | 2.5A @48V, 120W |
| İletişim Arayüzü | RS485 (USB), EtherCAT |
Uygulamalar
- Teleoperasyon: MR ve eldiven teleoperasyonunu destekler; Vision Pro teleoperasyonu; Manus Eldivenleri; Pico/Meta Quest.
- Robot kol ve insansı entegrasyon: xARM, Realman, UR ve diğer robot kolları ile uyumludur.
- Araştırma ve simülasyon: hassas URDF, dokunsal algılama simülasyonu; Isaac Gym ve Mujoco ile pekiştirmeli öğrenme için uygundur.
- İnsan-makine etkileşimi ve uyumlu kuvvet kontrolü ile insan araçlarının kullanımı.
Kılavuzlar
Xhand_adapter.stp
MH2.25_right_stp.zip
MH2.25_left_stp.zip
XHand_Control_ROS_Documentation.pdf
X-Hand_1_Urün_Kılavuzu_1.0.pdf
X-Hand_1_Kullanıcı_Hızlı_Başlangıç_Talimatları_1.0.pdf
Detaylar

ROBOTERA XHAND1, gerçek özgürlük ve gelişmiş beceri sunan tam direkt tahrikli robotik el.

ROBOTERA tarafından üretilen XHAND1: 12 serbestlik derecesine sahip, insansı beş parmaklı el, her parmak ucu için 270° dokunsal sensör, 80N kavrama gücü, 25kg yük kapasitesi. Karmaşık görevler ve alet kullanımı için tasarlanmıştır.

XHAND 1: Her eklem için direkt tahrik modüllerine sahip ilk becerikli el. Yüksek güçlü kablosuz motorlar, düşük sönümleme oranına sahip redüktörler, hassas enkoderler ve gelişmiş robotik manipülasyon için kendi geliştirdiği entegre eklem modülleri ile donatılmıştır.
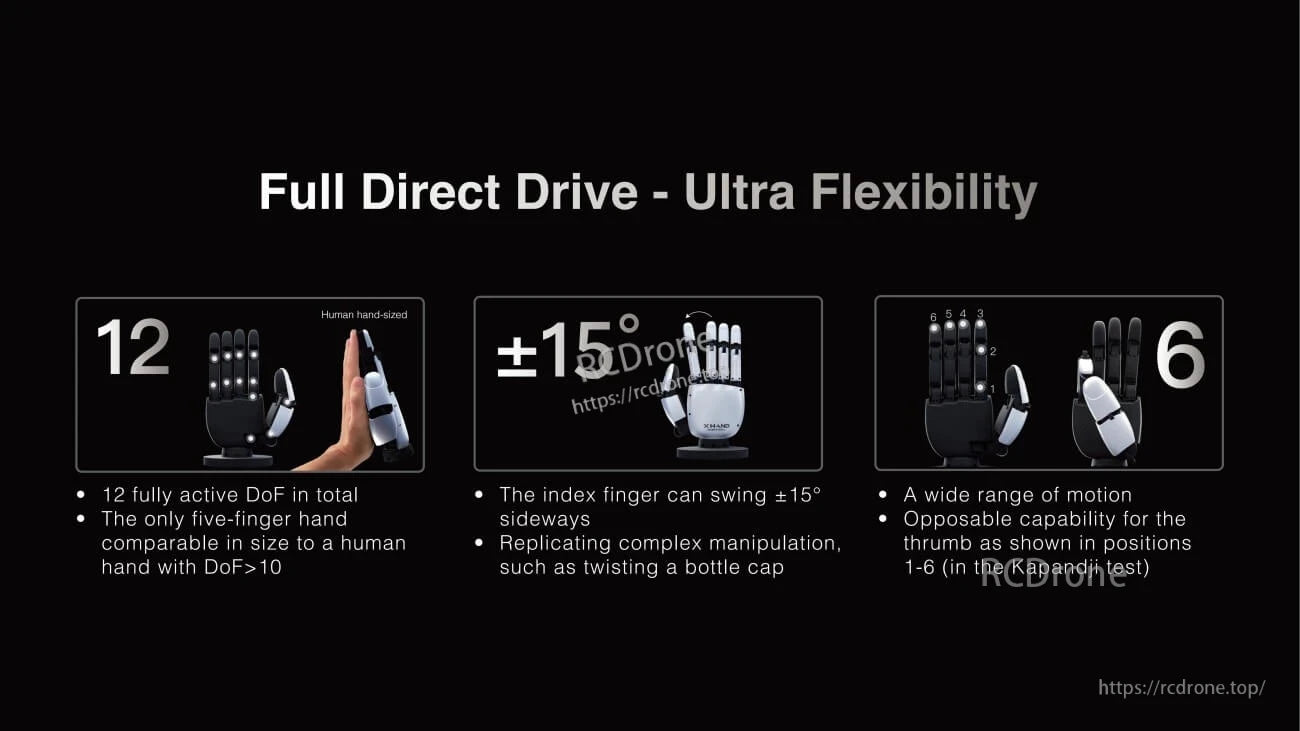
ROBOTERA XHAND 1, 12 aktif serbestlik derecesine sahip ultra esnek, insan boyutunda bir robotik eldir. İşaret parmağı karmaşık görevler için ±15° yanlara hareket edebilir ve başparmak, çok yönlü manipülasyon için altı karşıt pozisyon sunar.

ROBOTERA XHAND 1: 25kg yük, 80N kavrama gücü, tam direkt sürüş, benzer bağlantı/tendon destekli çözümleri aşar.

Tam Direkt Sürüş robot eli, dişli destekli hız ile 10 CPS'ye ulaşır, 1 Nm'den fazla tork ile bağlantı ve tendon sistemlerini geride bırakarak üstün oyun performansı sunar.

ROBOTERA XHAND 1, 3D kuvvet, dokunsal ve sıcaklık algılama için >100 nokta ve 0.05 N hassasiyetle 270° parmak ucu sensörlerine sahiptir, üstün kavrama performansı sağlar.
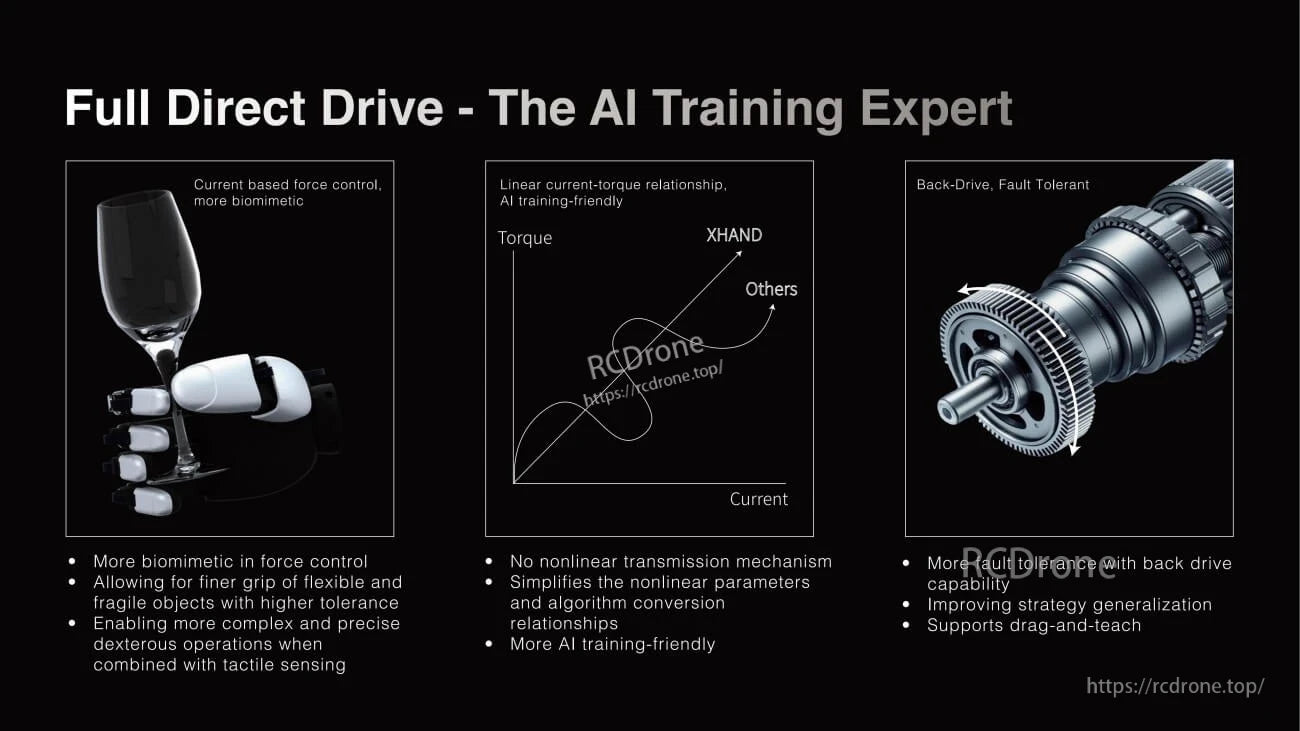
ROBOTERA XHAND 1, biyomimetik kuvvet kontrolü, AI eğitimi için lineer tork-akım tepkisi ve geri sürüş hata toleransı sunar—kesin işleme, basitleştirilmiş algoritmalar, sürükle ve öğret desteği ve geliştirilmiş strateji genellemesi sağlar.
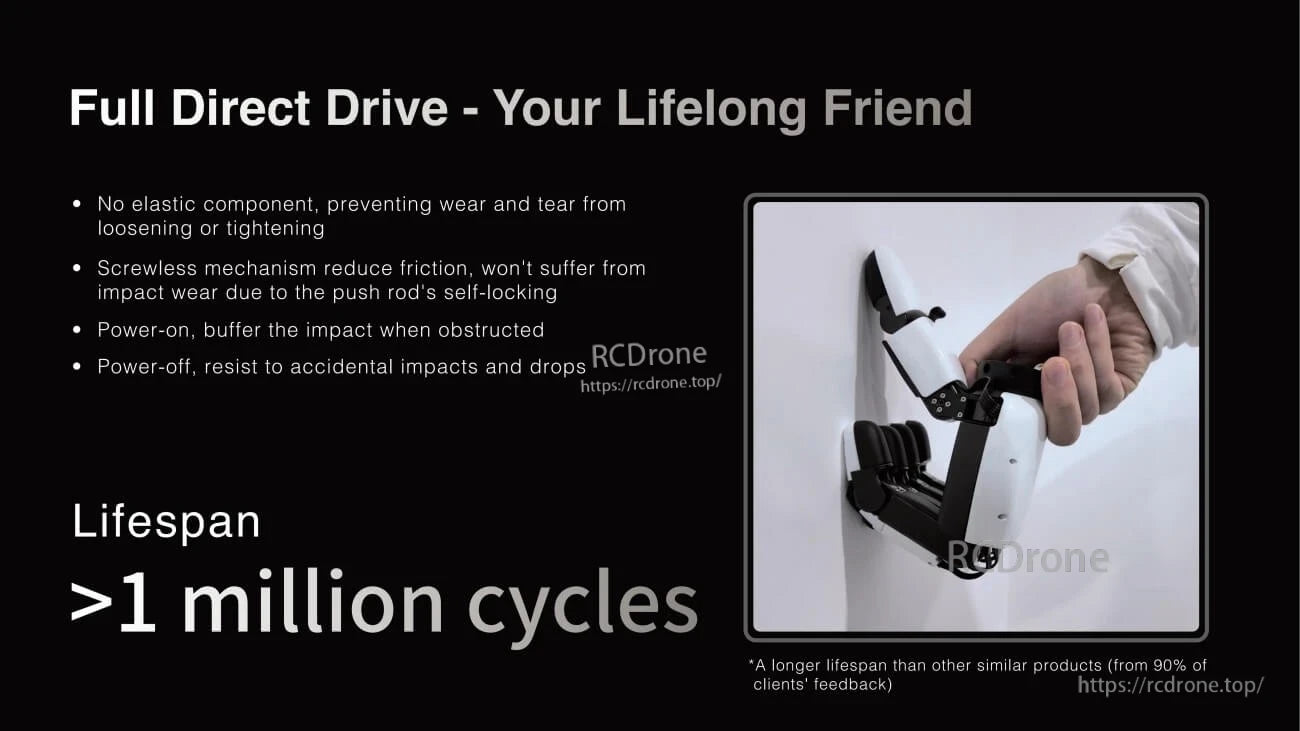
Tam Direkt Tahrik robot kolu, elastik parçalar veya vidalar olmadan dayanıklılık sunar, açıldığında darbe yastıklama, kapalıyken düşmeye karşı direnç ve bir milyondan fazla döngü ömrü ile benzer ürünleri müşteri geri bildirimlerine göre geride bırakır.

ROBOTERA XHAND 1, MR ve eldiven teleoperasyonunu destekler, ROS1/ROS2 ve x64/ARM üzerinde Ubuntu ile uyumludur. xARM, Realman, UR robot kolları ile entegrasyon için EtherCAT/TwinCAT/RS485 özelliklerine sahiptir. Hassas URDF modelleme ve dokunsal algılama simülasyonu sunar. Geliştirici dostu robotik uygulamalar için çapraz platform esnekliği ve gelişmiş kontrol protokolleri ile tasarlanmıştır.
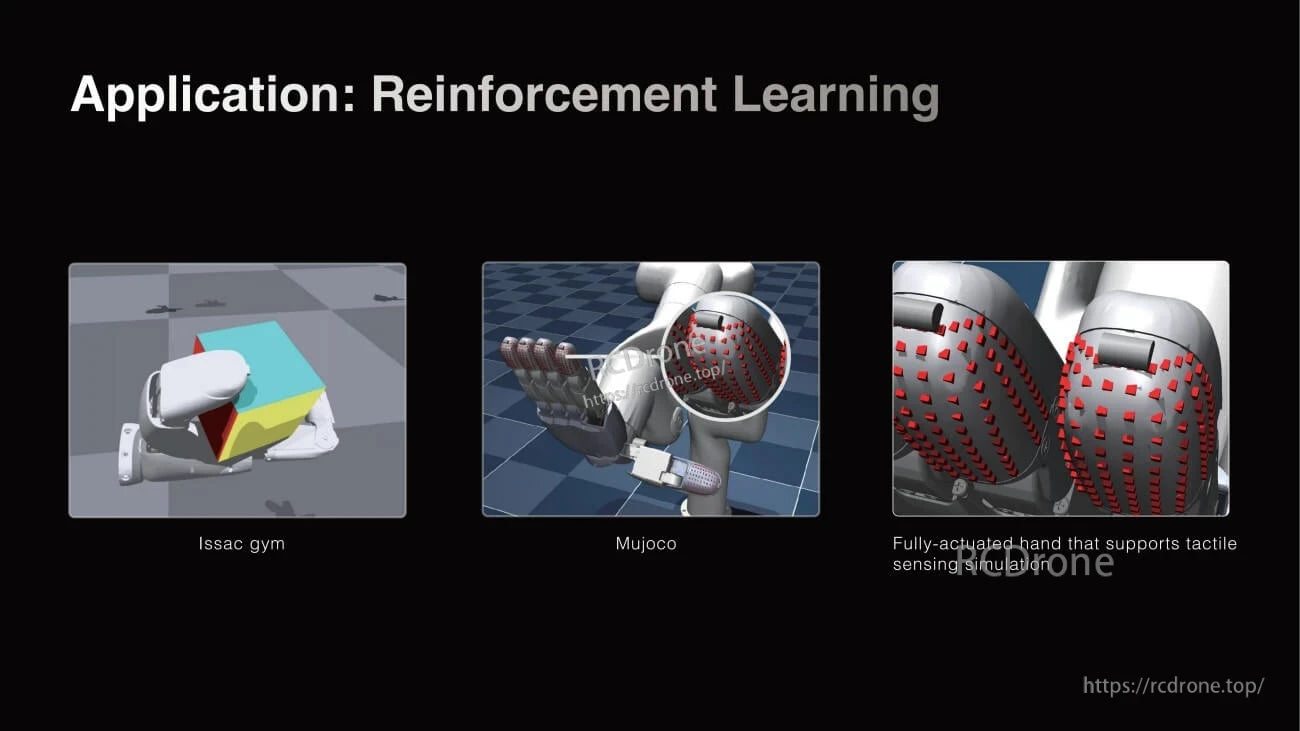
Güçlendirilmiş öğrenme uygulamaları: Issac gym, Mujoco ve gelişmiş robotik kontrol ve eğitim ortamları için dokunsal algılama simülasyonu ile tam hareketli el.
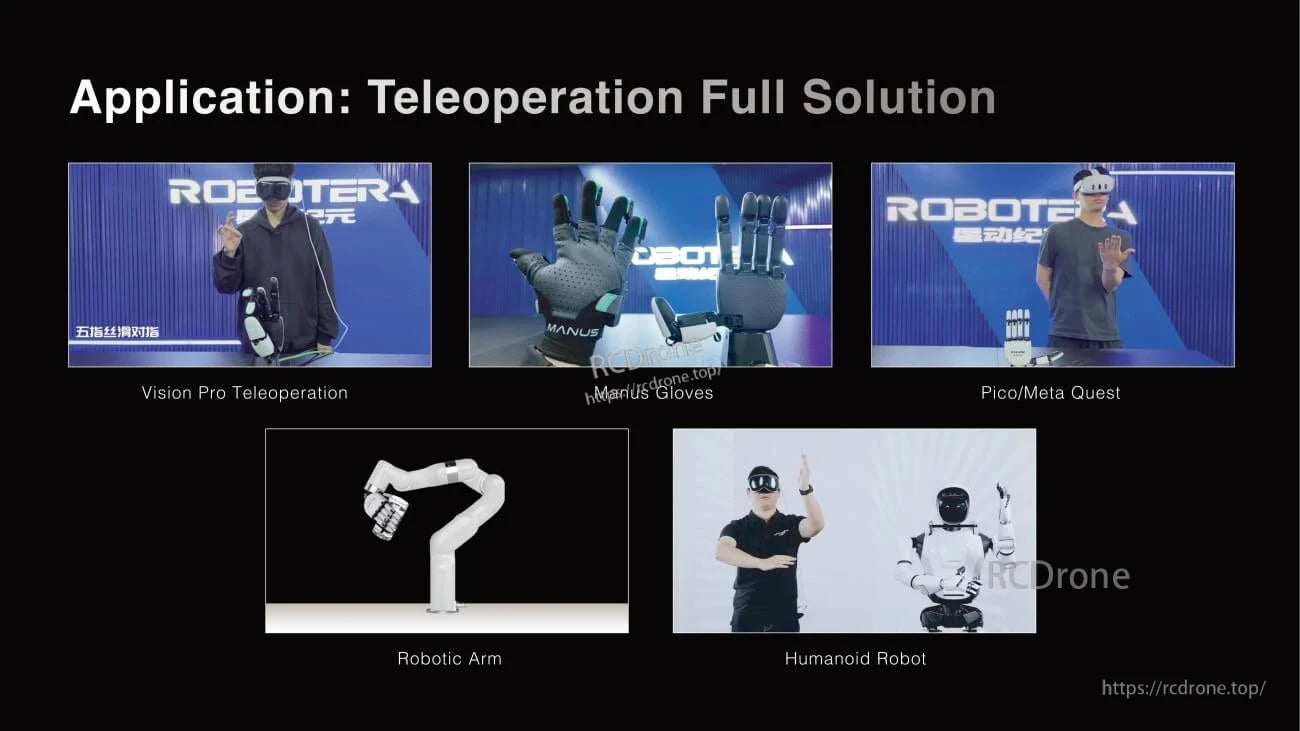
Gelişmiş uzaktan kontrol için Vision Pro, Manus Eldivenleri, Pico/Meta Quest, robotik kol ve insansı robot içeren tam teleoperasyon çözümü.
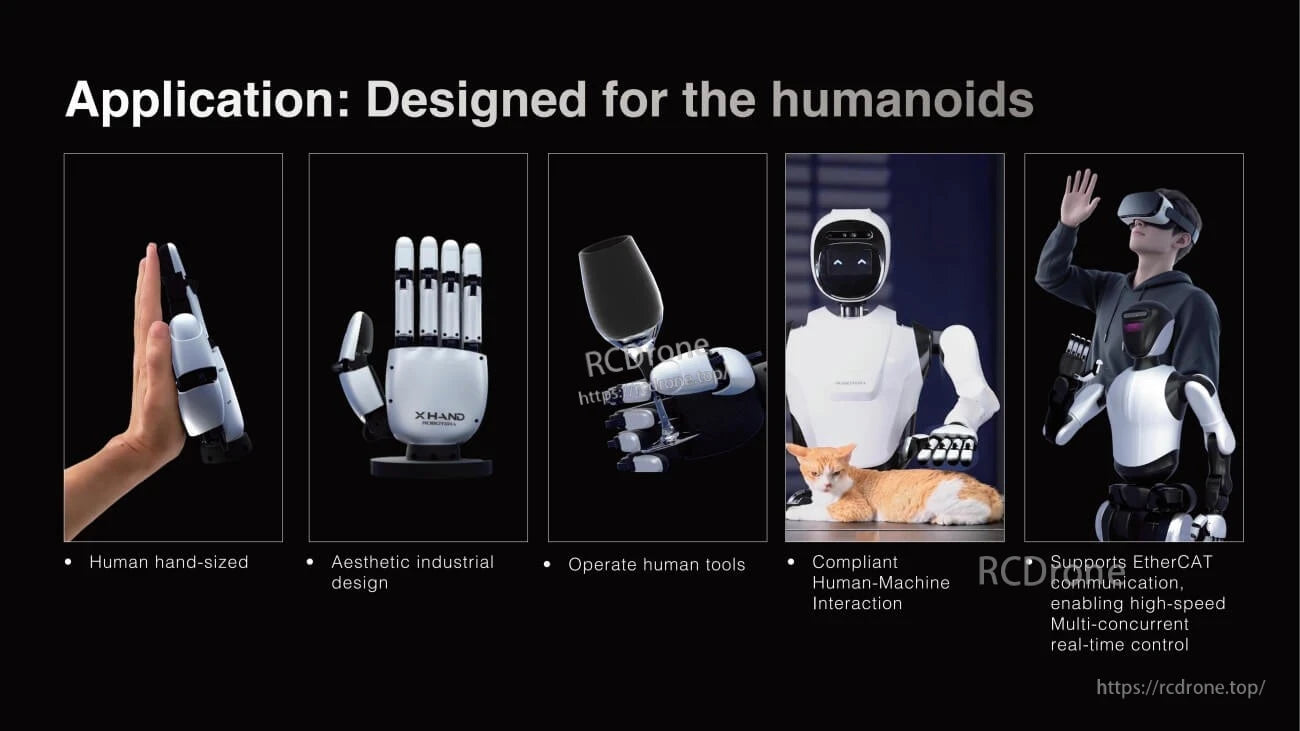
Estetik tasarıma sahip insan boyutunda robot eli, aletleri çalıştırır, uyumlu etkileşimi sağlar, gerçek zamanlı kontrol için EtherCAT'i destekler.
Related Collections




