



S2-F290 Programlanabilir Drone - Pixwawk Açık Kaynak ROS SLAM AI İkincil Geliştirme Drone Mücadelesi için Endüstriyel Seviye
S2-F290 Programlanabilir Drone - Pixwawk Açık Kaynak ROS SLAM AI İkincil Geliştirme Drone Mücadelesi için Endüstriyel Seviye
RCDrone
Teslim alım stok durumu yüklenemedi
Genel bakış
The S2-F290 Programlanabilir İHA yüksek performanslıdır endüstriyel sınıf drone ikincil geliştirme ve drone zorlukları için tasarlanmıştır. 2400g yük kapasitesi, A 6S 6000mAh pilve bir maksimum kontrol mesafesi 10KM, hassasiyet sunar GPS konumlandırma doğruluğu ≈1–2m Ve Seviye 3–4 rüzgar direnci. Tarafından desteklenmektedir Pixhawk 2.4.8 uçuş kontrolörü ile açık kaynaklı ROS SLAM teknolojisi, drone gelişmiş işlevleri destekler 3D LiDAR haritalama, YOLO tabanlı nesne tanıma ve formasyon uçuşu. Onun 3mm karbon fiber çerçeve olağanüstü dayanıklılık ve istikrar sağlar, aşırı koşullarda test edilmiştir. Platform, Çince/İngilizce QGC yer istasyonu desteği, modüler genişletilebilirlik ve kapsamlı eğitimler gibi özellikler sunarak son derece özelleştirilebilirdir ve bu da onu araştırma, rekabet ve geliştirme uygulamaları için ideal hale getirir.
Şartname
Uçak
| Parametre | Şartname |
|---|---|
| İsim | S2-F290 Programlanabilir İHA |
| Yük Ağırlığı | 2400 gr |
| Örnek | S2-F290 |
| GPS Konumlandırma Doğruluğu | ≈1–2m |
| Dingil açıklığı | 290mm |
| Maksimum Kalkış Ağırlığı | 3190 gr |
| Pil | 6S Standart 6000mAh Pil |
| Kontrol Mesafesi | 10KM (1000m içinde önerilir) |
| Rüzgar Direnci | Seviye 3–4 |
| Çalışma Ortamı | İç/Dış Mekan |
| Dayanıklılık Testi Sonuçları | Detaylar |
|---|---|
| Pervaneler | 7 inç |
| Pil Kapasitesi | 6S 6000mAh (5300mAh kullanılmış) |
| Çevre | Rüzgarsız |
| Uçuş Süresi | 11 dakika 30 saniye |
Uçuş Kontrolörü
| Bileşen | Şartname |
|---|---|
| FMU İşlemcisi | STM32H743 Cortex-M7, 480MHz, 2MB Flaş, 1MB SRAM |
| IO İşlemcisi | STM32F103 Cortex-M3, 72MHz, 64KB SRAM |
| Sensörler | İvmeölçer/Jiroskop: ICM-42688-P |
| İvmeölçer/Jiroskop: BMI055 | |
| Manyetometre: IST8310 | |
| Barometre: MS5611 | |
| Anma Gerilimi | Maksimum Giriş Voltajı: 6V |
| USB Güç Girişi: 4.75-5.25V | |
| Servo Girişi: 0-36V | |
| Anma Akımı | Telemetri 1 Maksimum Çıkış Akımı: 1A |
| Diğer Portlar İçin Kombine Akım: 1A | |
| Mekanik Veriler | Boyutlar: 53,3 × 39 × 16,2 mm |
| Ağırlık: 39.2 gr | |
| Limanlar | - 14 PWM Çıkışı (8'i IO'dan, 6'sı FMU'dan) |
| - 2 Genel Amaçlı Seri Port | |
| - 2 GPS Portu | |
| - 1 I2C Bağlantı Noktası | |
| - 2 CAN Bağlantı Noktası | |
| - Spektrum/DSM, S.BUS, CPPM vb. için RC Girişi | |
| - Güç Giriş Portu | |
| Diğer Özellikler | Çalışma Sıcaklığı: -40–85°C |
Gemideki Bilgisayar
| Bileşen | Şartname |
|---|---|
| Hesaplama Gücü | 40 ÜST |
| Grafik işlemcisi | 1024 çekirdekli NVIDIA Ampere GPU ile 32 Tensor Çekirdek |
| İşlemci | 6 çekirdekli Arm Cortex-A78AE v8.2 64 bit, 1,5 GHz |
| Veri deposu | 8GB 128-bit LPDDR5 68GB/s |
| Depolamak | SD Kart veya Harici NVMe |
| Maksimum CPU Frekansı | 1,5 GHz |
Uzaktan Kumanda
| Bileşen | Şartname |
|---|---|
| Çalışma Voltajı | 4.2V |
| Çalışma Akımı | 100mA |
| Frekans Bandı | 2,4–2,483 GHz |
| Ağırlık | 525 gr |
| Boyutlar | 130×150×20 mm |
| Pil Ömrü | 20 saat |
| Şarj Portu | MİKRO-USB |
| Kontrol Aralığı | 7 KİLOMETRE |
Küresel Konumlama Sistemi
| Bileşen | Şartname |
|---|---|
| Uydu Alıcısı | UBLOX-M9, 92 Kanal |
| Elektronik Pusula | QMC5883L |
| Uydu Sistemleri | GPS L1 C/A, GLONASS L1OF, BeiDou B1, Galileo E1 |
| Uydu Kanalları | 32 |
| Güncelleme Oranı | 25Hz |
| Konumlandırma Doğruluğu | 1,5m CEP (ideal ortam) |
| Başlangıç Zamanı | Soğuk Başlatma: 24sn, Sıcak Başlatma: 1sn |
| Boyutlar | 25x25x8 mm |
| Ağırlık | 12 gr |
Pil
| Bileşen | Şartname |
|---|---|
| Bağlayıcı Türü | XT60 |
| Önerilen Şarj Akımı | 3–5A |
| Pil Kapasitesi | 6000mAh |
| Nominal Voltaj | 22.2V |
| Boşaltma Oranı | 75C |
| Boyutlar | 50×44×158 mm |
| Ağırlık | 816 gr |
LiDAR
| Bileşen | Şartname |
|---|---|
| Lazer Dalga Boyu | 905nm |
| Menzil | 40m @ %10 Yansıtma, 70m @ %80 Yansıtma |
| Minimum Algılama Alanı | 0,1m |
| Görüş Alanı | Yatay: 360°, Dikey: -7° ila 52° |
| Nokta Bulutu Çıktısı | 200.000 puan/saniye |
| Puan Oranı | 10Hz |
| Koruma Seviyesi | IP67 |
| Güç | 6,5W (25°C ortam) |
| Voltaj Aralığı | 9–27V DC |
| Boyutlar | 65x65x60 mm |
| Ağırlık | 265 gr |
Derinlik Kamerası
| Bileşen | Şartname |
|---|---|
| Derinlik Teknolojisi | Çift Kızılötesi |
| Derinlik Görüntüleme Açısı | 87° × 58° (Yatay × Dikey) |
| Derinlik Çözünürlüğü | 1280 × 720 |
| Derinlik Doğruluğu | <2% 2m içinde |
| Derinlik Kare Hızı | 90fps |
| Derinlik Aralığı | 0,3–3m |
| Boyutlar | 90×25×25 mm |
| Çalışma Ortamı | İç/Dış Mekan |
Tek lensli kamera
| Bileşen | Şartname |
|---|---|
| Maksimum Çözünürlük | 2 MP (1920 × 1080) |
| Maksimum Kare Hızı | 30fps |
| Görüş Alanı | ~90° |
| Kablo Uzunluğu | ~1.5m |
| Boyutlar | 35x35x30 mm |
Fonksiyon Tablosu
| yağ sürme | Temel Yapılandırma | İsteğe bağlı D435 | İsteğe bağlı D435 + 4G Modülü |
|---|---|---|---|
| Yükseklik sabit, havada asılı kalma, eve dönüş | ✔ | ✔ | ✔ |
| İniş, stabilizasyon, rota uçuşu | ✔ | ✔ | ✔ |
| Uzaktan kumandalı uçuş | ✔ | ✔ | ✔ |
| Uçuş kontrolörü ile yerleşik bilgisayar arasındaki iletişim | ✔ | ✔ | ✔ |
| QR kod tanıma ve iniş | ✔ | ✔ | ✔ |
| Nesne tanıma ve bırakma | ✔ | ✔ | ✔ |
| Eş zamanlı haritalama ve engel kaçınma | ✔ | ✔ | ✔ |
| 3D LiDAR haritalama ve konumlandırma | ✔ | ✔ | ✔ |
| YOLO tabanlı nesne tanıma | ✘ | ✔ | ✔ |
| Nesne tanıma ve izleme | ✘ | ✔ | ✔ |
| 4G Uzaktan Kumanda | ✘ | ✘ | ✔ |
Paket İçeriği
Temel Yapılandırma
- Çerçeve: F290 Karbon Fiber Çerçeve
- Motorlar: 4× T-motor F100 Kv1100
- ESC: 4× FlyFun T-rex 5 45A
- Pervaneler: 4× 7 inç Üç Kanatlı Pervaneler
- Uçuş Kontrolörü: Pixhawk6mini
- Pil: 6S Standart Pil 6000mAh
- Şarj cihazı: 6S Pil Şarj Cihazı
- Gemideki Bilgisayar: Jetson Orin Nano 8G + WIFI Modülü
- SSD: 256G
- LiDAR: Livox MID360
- Kamera: 150° Geniş açılı USB Kamera
- Uzaktan Kumanda: Cloud T10 (veri alıcısı dahil)
İsteğe Bağlı Yapılandırma: D435
Tüm bileşenleri içerir Temel Yapılandırma, artı:
- Çift Lensli Kamera: D435
İsteğe Bağlı Yapılandırma: D435 + 4G Modülü
Tüm bileşenleri içerir Temel Yapılandırma, artı:
- Çift Lensli Kamera: D435
- 4G Modülü
Detaylar
S2-F290 Programlanabilir İHA
- ✔ Teknik Destek, Sorunsuz Satış Sonrası Hizmet
- ✔ Rekabet Örnekleri Sağlar, Özelleştirilebilir
- ✔ Çince/İngilizce Mobil Yer İstasyonu
- ✔ Yüksek Stabilite, Yüksek Performans
- ✔ İç/Dış Mekan
S2-F290, keşif ve inovasyona odaklanan, drone yarışları için tasarlanmış son teknoloji bir drone'dur.İleri teknoloji ve sınırsız yaratıcılığın bir araya getirileceği şekilde tasarlanan araç, çeşitli karmaşık ortamlara uyum sağlayabiliyor ve hava keşfini daha erişilebilir ve etkili hale getiriyor.
Bu drone, muazzam bir güce sahip kompakt bir tasarıma sahiptir. Kullanıcıların performansını hızla öğrenmesini ve optimize etmesini sağlayan çok sayıda rekabet örneği sunar. Özel bir Çince/İngilizce mobil yer istasyonuyla donatılmış olması, drone operasyon kolaylığını büyük ölçüde artırır. Ayrıca, kullanıcıların rekabetçi senaryolarda mükemmellik gösterirken istedikleri işlevselliklere en kısa sürede ulaşmalarını sağlamak için rekabetçi kaynak kodu açıklamaları ve özelleştirilebilirlik sunar.

Kalkınma / Rekabet / Araştırma İhtiyaçlarının Karşılanması
| Kategori | Detaylar |
|---|---|
| ROS Temel Bilgisi | - Uzaktan Kumanda |
| - Uçuş Kontrolörü ile Uçak Bilgisayarı Arasındaki İletişim | |
| Temel Fonksiyonlar | - Rota Planlaması |
| - QR Kod Tanıma ve Konumlandırma | |
| - Gemi Dışı Otonom Devriye | |
| Gelişmiş Fonksiyonlar | - İniş için QR Kod Tanıma |
| - Nesne Tanıma ve Bırakma | |
| - Eşzamanlı Haritalama ve Engellerden Kaçınma | |
| - 3D LiDAR Haritalama ve Konumlandırma | |
| - YOLO tabanlı Nesne Tanıma | |
| - Web tabanlı Video İletimi | |
| - Açık Hava Formasyon Uçuşu | |
| - Kara-Hava İşbirliği Oluşumu | |
| İsteğe bağlı D435 Kamera İşlevleri | - VINS Görsel Konumlandırma |
| - YOLO tabanlı Nesne Tanıma ve İzleme | |
| İsteğe bağlı 4G İletişim Fonksiyonları | - 4G Uzaktan Kumanda |
Otonom Engellerden Kaçınma, Kapsamlı Güvenlik Güvencesi
Otonom engel önleme için 3D LiDAR kullanan drone, küresel rota planlamasını yerel dinamik engel önlemeyle birleştirerek her yönden gelen engelleri hassas bir şekilde tespit eder. Otomatik durmayı ve sürekli uçuşu destekleyerek uçuş yolu boyunca nesnelerden esnek bir şekilde kaçınmayı mümkün kılar ve daha güvenli bir uçuş deneyimi sağlar.

QR Kod Tanıma ve İniş
İHA, QR kodunun gerçek zamanlı konumsal bilgilerini edinmek için kamerayı ve QR kodu tanıma modülünü etkinleştirir. İHA iniş sırasında konumunu dinamik olarak ayarlayarak inişe geçmeden önce kameranın görüş alanıyla tam hizalanmayı sağlar.
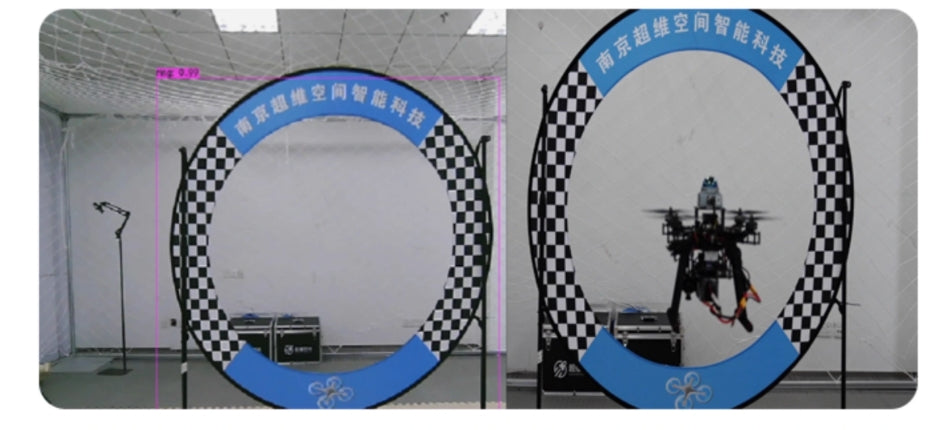
YOLO Nesne Tanıma
İHA, nesne tanıma için YOLOv8'i kullanır ve dairesel çerçevenin konumsal bilgilerini gerçek zamanlı olarak edinir. Otonom olarak konumunu ayarlar ve dairesel çerçeve içinde gezinir.
Açık Hava Formasyon Uçuşu
İHA, sürü formasyon teknolojisini kullanarak birden fazla İHA'nın koordineli bir şekilde kontrol edilmesini ve formasyon uçuşu gerçekleştirilmesini sağlıyor.Gelişmiş iletişim ve işbirlikli kontrol algoritmalarından yararlanarak, drone'lar arasında gerçek zamanlı iletişim ve bilgi alışverişini kolaylaştırıyor, hareketlerini ve konumlarını senkronize ederek sıkı bir formasyon oluşturuyor.

Kara-Hava İşbirliği Oluşumu
Bu platform, kara ve hava dronları arasında işbirlikçi oluşumu destekler. Cihazlar arası bağlantı için topoloji yapılarına sahip yerel bir alan ağından yararlanarak, yüksek hızlı ve istikrarlı iletişimi sağlamak için UDP iletişimini ve özel protokolleri kullanır. PID kontrolüyle, ana dron ve birden fazla köle dron arasında senkronize takip elde ederek, oluşum istikrarını ve operasyonel verimliliği sağlar.

Yarışma Örneği
Katılımcıların çeşitli yarışma türlerine kolayca uyum sağlamalarını sağlayan, adım adım rehberlik içeren özel yarışma senaryoları sunar.



S2-F290 Programlanabilir İHA'nın Özellikleri
Yüksek Maliyet-Performans
- Yeni başlayanlar için öğrenme eğrisini kısaltmak ve drone kullanımına hakim olmayı kolaylaştırmak amacıyla tasarlanmıştır.
- Uygun fiyatıyla öğrenciler ve meraklılar için ideal bir öğrenme drone'u.
Yüksek Stabilite
- Üç yıl boyunca çeşitli aşırı koşullarda test edildi.
- Gelişmiş dayanıklılık ve denge için 3 mm kalınlığında karbon fiber çerçeve ile donatılmıştır.
- Kullanıcıların ilk yarışma deneyimlerinde tanınmalarını sağlar.
Genişletilebilirlik
- Çeşitli uygulamalar için gelişmiş özelleştirmeyi destekler.
- Drone performansını ve işlevselliğini sürekli olarak iyileştirmek için çeşitli genişletme bileşenleriyle uyumludur.
Sorunsuz Satış Sonrası Hizmet
- Kapsamlı rehberlik ve destek sağlayan profesyonel ekip.
- Garanti süresi içerisinde kullanım hatalarından kaynaklanan donanım hasarlarının (aksesuarlar ve piller hariç) ücretsiz onarımını sağlar.
Özelleştirilebilir
- ROS ve QGC'de özel geliştirme desteği sağlar.
- Haritalama ve navigasyonda %98'in üzerinde yüksek doğruluğu destekler.
- RTK/GPS modülleri, logolar ve çeşitli benzersiz işlevlerle uyumludur.

Yer İstasyonu Yapılandırması
Pixhawk 2.4.8 Uçuş Kontrolcüsünü Kullanma
En son standart 32-bit STM32F427 işlemci ve MS5611 barometresi ile donatılan bu uçuş kontrolörü, açık kaynaklı bir seçenek olarak bol miktarda arayüz ve yüksek maliyet performansı sunuyor.
1. Özel Derinlemesine Özelleştirilmiş QGC Yer İstasyonu
- Çince'ye %98'in üzerinde yerelleştirme oranına ulaşıldı.
- NTRIP gibi gelişmiş özellikleri destekler.
2. Mobil QGC Yer İstasyonu
- Akıllı telefonlardan kusursuz bir şekilde çalışabilmesini sağlayan QGC yer istasyonunun mobil versiyonunu sunar.
3. Wi-Fi veya 4G Doğrudan Bağlantı
- Akıllı telefon veya bilgisayarınızı kullanarak çalıştırmak için Wi-Fi üzerinden bağlanmanız yeterli.
- Not: "Ezuav" sistemi cihaza bağlı olduğunu gösteriyor ancak internet erişimi sağlayamıyor.

Kapsamlı Eğitimler ve Tamamen Açık Kaynaklı Kaynaklar
- S2-F290 drone'unun tüm işlevlerini kapsayan son derece ayrıntılı kullanım eğitimleri.
- Tamamen açık kaynaklı materyaller, şunları içerir:
- Yazılım tanıtımları ve kurulum kılavuzları.
- OpenCV tabanlı nesne tanıma, 3 boyutlu haritalama ve uçak dışında otonom uçuş gibi temel ve ileri özelliklere yönelik eğitimler.
- PX4 ve MAVLink haberleşmesi için özel geliştirme talimatları.
- Sorun giderme SSS'leri, ROS ortamı yapılandırması ve operasyonel adımlar.
Related Collections


