




Flywoo GOKU GM10 Nano V3 GPS Modülü ve Pusula, M10050 GNSS, 2.6g, 12x17x5mm, 6-Pin
Flywoo GOKU GM10 Nano V3 GPS Modülü ve Pusula, M10050 GNSS, 2.6g, 12x17x5mm, 6-Pin
FLYWOO
Teslim alım stok durumu yüklenemedi
Genel Bakış
Verilen bilgilere dayanarak, GM10 V3 serisi, önceki GM8 V2 ile karşılaştırıldığında daha hızlı uydu araması için en son M10050 GNSS çipini kullanmaktadır. Kurulum yardımı veya uyumluluk soruları için [email protected] orile iletişime geçin https://rcdrone.top/ .
Ana Özellikler
- Nano boyut ve hafiflik: 2.6 g
- Entegre pusula
- Tak ve çalıştır (lehime gerek yok)
- 6 pinli pad konektörü
- GPS Modülü. Üç Modül.
Uyumluluk Notları
- Not: GOKU GM10 V3 GPS çipi, sağlanan notta M1005 olarak referans verilmiştir. Sadece Betaflight (BF) 4.3.x yazılımı Ublox protokolünü kullanabilir. BF 4.2.x ve önceki yalnızca NMEA protokolünü kullanabilir. Not, iki protokol arasında performans farkı olmadığını belirtmektedir.
- BETAFLIGHT: 4.3.0. üzerindeki firmware'i kullanın.
- INAV: en son 6.0.0 konfigüratörünü, ve 5.0.0. üzerindeki firmware'i kullanın.
Özellikler
| Marka | FLYWOO |
| Model | GM10 NANO V3 GPS pusula ile |
| Boyutlar | 12mm*17mm*5mm |
| Ağırlık | 2.6g |
| Bağlantı Noktası | 6pin Pad |
| Yonga Seti | M10050 (Onuncu Nesil Yonga) |
| Alım Formatı | GPS, GLONASS, Galileo, BeiDou, QZSS ve SBAS |
| Varsayılan Protokol | GPS, Galileo, BeiDou |
| Frekans | GPS L1, GLONASS L1, BeiDou B1, SBAS L1, Galileo E1 |
| Kanal Sayısı | 72 Arama Kanalı |
| Duyarlılık (Takip) | -162dBm |
| Duyarlılık (Yeniden Kazanım) | -160dBm |
| Destek Hızı | 4800bps ile 921600bps (Varsayılan 115200bps) |
| Veri Seviyesi | TTL veya RS-232 (Varsayılan TTL seviyesi) |
| Veri Protokolü | BF4.3.X (UBLOX) / BF4.2.X (NMEA) |
| Çıkış Frekansı | 1Hz-10Hz (Varsayılan 10Hz) |
| Çalışma Limiti (Yükseklik) | 50,000m Maks |
| Çalışma Limiti (Hız) | 500m/s Maks |
| Çalışma Limiti (İvme) | 4g'den az |
| VCC | DC Voltajı: 3.3-5V |
| Çalışma Sıcaklığı | -40 °C ~ +85°C |
| Depolama Sıcaklığı | -40°C ~ +105°C |
| Göstergeler | PPS LED: KIRMIZI. GPS sabitlenmediğinde PPS LED'i yanar ve sabitlendiğinde söner. |
| Modül Pinleri (metin) | RX, TX, 3.3-5V, GND |
| Kompas/GPS Pad Etiketleri (şematik) | T, R, G, V, C, D |
| Uçuş Kontrol Cihazı Pad Etiketleri (şematik) | TX, RX, GND, 5V, SCL, SDA |
| GM10 NANO V3 (KOMPAS) Etiketi (şematik) | SD-SC-V-G-RX-TX |
İşletim Kılavuzu
Kompas yön seçenekleri (gösterilen)
- Varsayılan
- SA 0°
- SA 90°
- SA 180°
- SA 270°
- SA 0° çevirme
- SA 90° çevirme
- SA 180° çevirme
- SA 270° çevirme
- Özel
Betaflight GPS ve GPS Kurtarma Modu Ayarları (gösterilen)
- Seri portu açın: GPS / 115200 baud hızı.
- GPS anahtarını açın ve UBLOX/NMEA protokolünü ayarlayın.
- RXLOSS kontrol kurtarma modu kanalını ayarlayın (örnek gösterim: AUX 2 GPS KURTARMA, değeri 2000).
- GPS kurtarma modu seçeneğini seçin (örnek değerler gösterilmektedir): Açı 32; Başlangıç irtifası (metre) 50; İniş mesafesi (metre) 200; Eve minimum mesafe (metre) 100; Yerden hız (metre/saniye) 20.00; Gaz minimum 1100; Gaz maksimum 1600; Gaz hover 1280; Yükselme hızı (metre/saniye) 5.00; Alçalma hızı (metre/saniye) 1.50; Minimum uydu 5; İrtifa modu Maksimum irtifa; Sağlamlık kontrolleri Açık.
İçindekiler
- 1x GM10 NANO V3 GPS pusula ile
- 1x 100mm Kablo
- 1x Bakır Folyo
Ayrıntılar
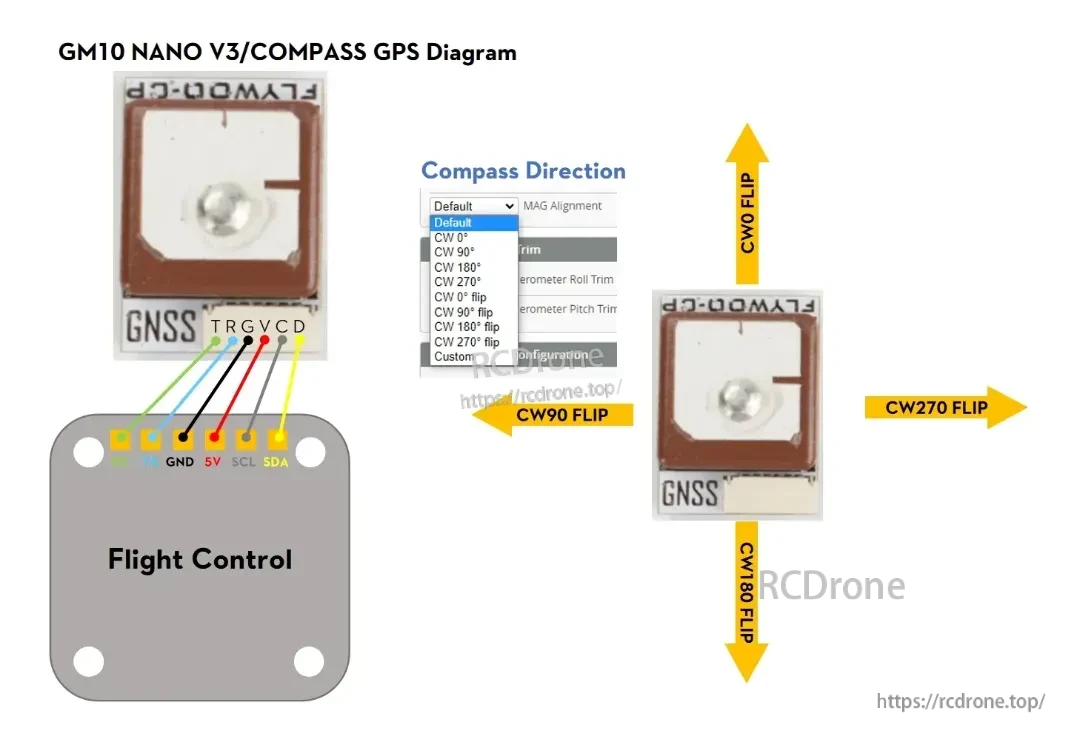
GM10 Nano V3 GPS kablolaması, farklı modül yönelimleri için pusula yön seçenekleri ile birlikte TX/RX artı 5V ve I2C (SCL/SDA) kullanır.

Flywoo GOKU GM10 Nano V3 GPS, uçuş kontrolörü ile 5V ve GND gücü artı UART TX/RX ile bağlanır, pusula için isteğe bağlı SDA/SCL ile.

Flywoo GOKU GM10 Nano V3 GPS, daha hızlı uydu araması için tasarlanmıştır ve 30'dan fazla uydunun takibini destekler.

GPS seri portunu 115200 baud olarak ayarlayın ve Kurtarma Modu kurulumu için UBLOX/NMEA protokolü ile GPS anahtarını etkinleştirin.

GPS Kurtarma modu, GPS KURTARMA için bir AUX kanalı atayarak ve Betaflight'ta Eve Dönüş parametrelerini ayarlayarak kurulabilir.
Related Collections




