STM32 Açık Kaynak Quadcopter DIY Kiti - Lazer Optik Akış Öğrenci Öğrenme Kartı PCB + PID Parametre Hata Ayıklama Rafı
STM32 Açık Kaynak Quadcopter DIY Kiti - Lazer Optik Akış Öğrenci Öğrenme Kartı PCB + PID Parametre Hata Ayıklama Rafı
RCDrone
Teslim alım stok durumu yüklenemedi
Genel bakış
The STM32 Kendin Yap Açık Kaynaklı Quadcopter Kiti öğrenciler, amatörler ve uygulamalı deneyim isteyen geliştiriciler için kapsamlı bir çözümdür drone programlama, uçuş dinamikleri ve donanım geliştirme. STM32F103C8T6 mikrodenetleyici, MPU6050 6 eksenli jiroskop, Ve NRF24L01 kablosuz modül, bu quadcopter, pürüzsüz ve istikrarlı uçuş için son teknoloji ile donatılmıştır. optik akış stabilizasyonu ile birleştirilmiş barometrik basınç sensörleri hassas yükseklik sabitleme ve konum kilitleme sağlarken, açık kaynaklı C yazılımı kullanıcıların uçuş algoritmalarını değiştirmesine olanak tanır. özelleştirilebilir IO portları, kablosuz PID parametre ayarıve destek ikincil gelişim Keil MDK5 kullanan bu quadcopter, hem yeni başlayanlar hem de ileri düzey kullanıcılar için eşsiz bir çok yönlülük sunar. Güçlü 3.7V 1200mAh pil 10 dakikaya kadar uçuş süresi sağlar ve hafiftir 320mm x 230mm çerçeve stabilite ve taşınabilirlik için tasarlanmıştır. Dahil edilen PID hata ayıklama rafı öğrenme deneyimini daha da geliştirir ve bu kiti eğitim projeleri, yarışmalar ve drone meraklıları için ideal hale getirir.
Temel Özellikler
-
Uçuş Kontrol Hassasiyeti:
- İle donatılmış STM32F103C8T6 mikrodenetleyici Ve MPU6050 jiroskop güvenilir uçuş dinamikleri için.
- Optik akış modülü (PM)W3901) Ve barometrik sensör (SPL06-001) hassas pozisyon sabitleme ve yükseklik sabitleme (20cm–400cm) sağlar.
-
Açık Kaynak ve Programlanabilirlik:
- Tamamen açık kaynaklı aygıt yazılımı standart C kolay ikincil geliştirme için.
- Uyumlu Keil MDK5 İleri programlama projeleri için ortam.
-
Kablosuz Kontrol:
- Özellikler NRF24L01 kablosuz modül bir kontrol mesafesini desteklemek 50m+ Açık ortamlarda.
- Kablosuz PID parametre ayarı X, Y, Z eksenleri için uçuş optimizasyonunu basitleştirir.
-
Sağlam Donanım Tasarımı:
- Dayanıklı çerçeve 8520 fırçalı motorlar Ve 13,5 cm pervaneler istikrarlı iç ve dış uçuşlar için.
- Hafif tasarım (Pil dahil 100g) yükleri destekler 60 gr, sensör veya kamera eklemeye uygun hale getiriyor.
-
Gelişmiş Öğrenme Araçları:
- Bir içerir PID hata ayıklama rafı PID parametrelerinin ince ayarı için.
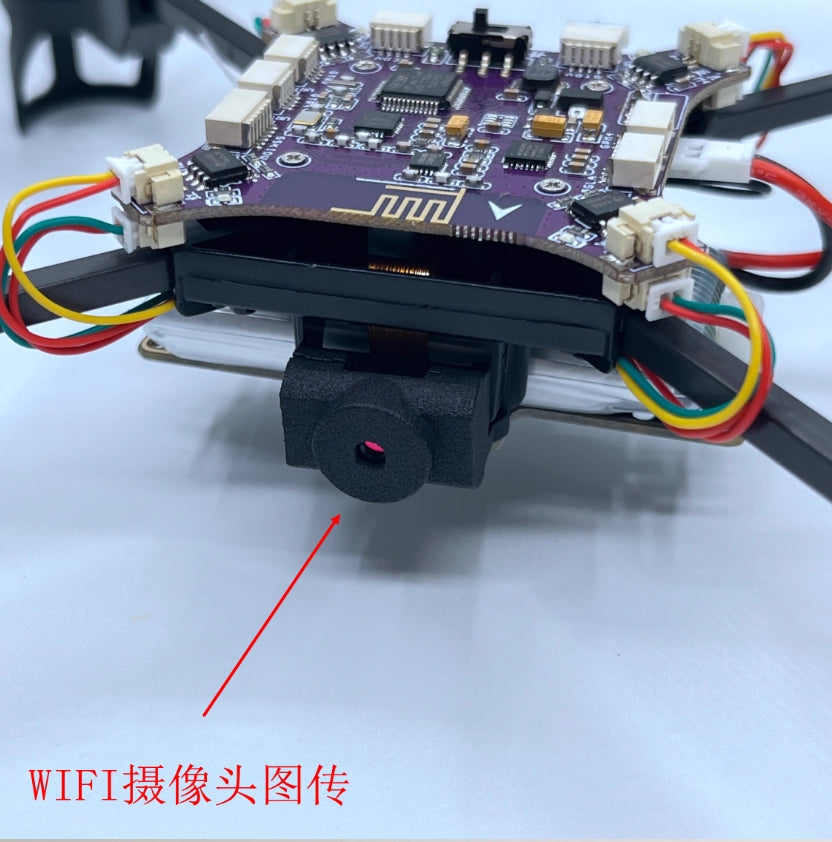
- Önceden lehimlenmiş IO portları şu uzantıları destekler: Wi-Fi kamera arayüzleri, SPI, UART, Ve IIC modülleri.
-
Güçlü Pil Sistemi:
- İçerir 3.7V 380mAh Ve 3.7V 1200mAh pilleruçuş saatleri sunan 5 ila 10 dakika yük ve koşullara bağlı olarak.
- Aşırı şarj ve deşarja karşı dahili koruma, pil güvenliğini sağlar.
-
Tak ve Çalıştır Bağlantısı:
- USB HID bağlantısı için gerçek zamanlı veri aktarımı ve bilgisayar arayüzü üzerinden parametre ayarlamaları.
- Hem SWD'yi hem de Linux'u destekleyen kullanımı kolay SWD programlama arayüzü J-Bağlantısı Ve ST-Bağlantısı hata ayıklayıcılar.
Teknik Özellikler
Dört pervaneli helikopter
- Ana Çip: STM32F103C8T6
- Jiroskop: MPU6050 (6 eksenli)
- Kablosuz Modül: NRF24L01 (SI24R1)
- Motor Sürücüsü: AO3400 (A09T)
- Motorlar: 8520 fırçalı motorlar
- Pervaneler: 13,5 cm (4 adet dahil)
- Sensörler: SPL06-001 (barometre), PMW3901 (optik akış)
- Pil: 3.7V 1200mAh (10 dakikalık uçuş) + 3.7V 380mAh (5 dakikalık uçuş)
- Ağırlık: 100g (pil dahil)
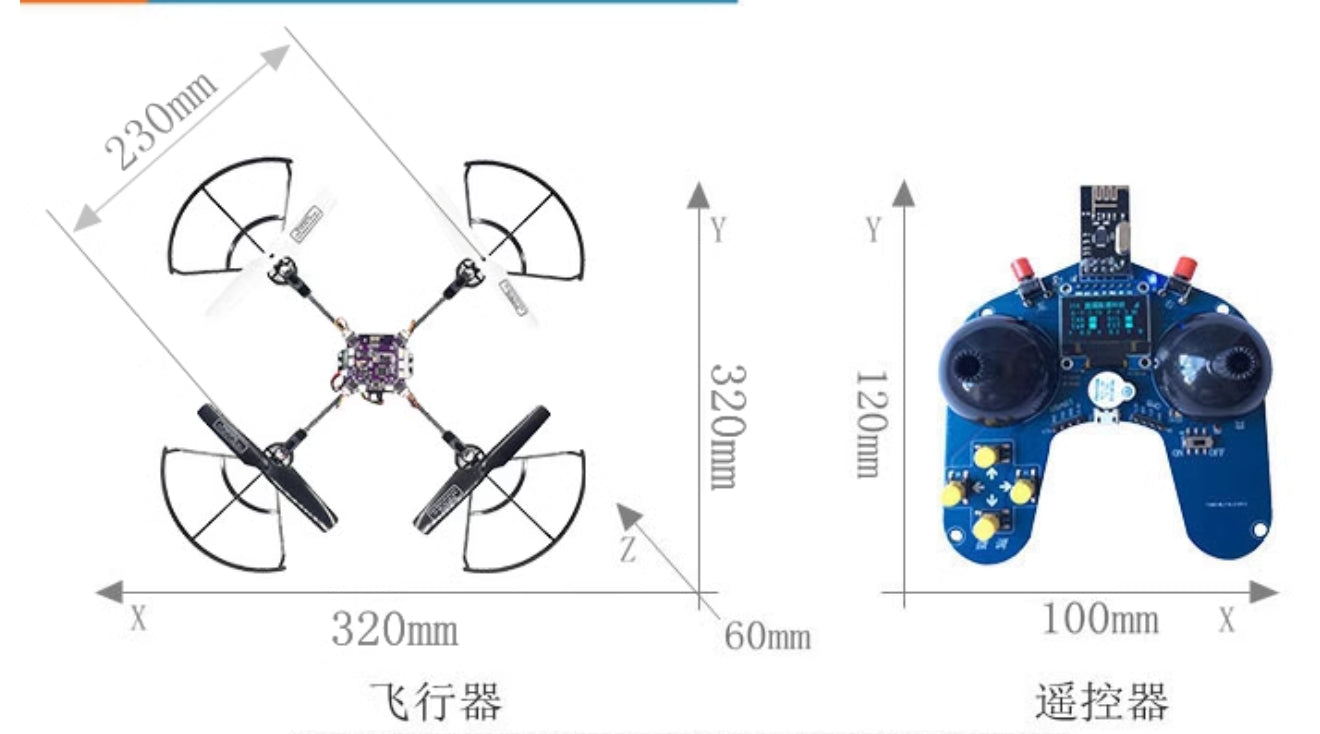
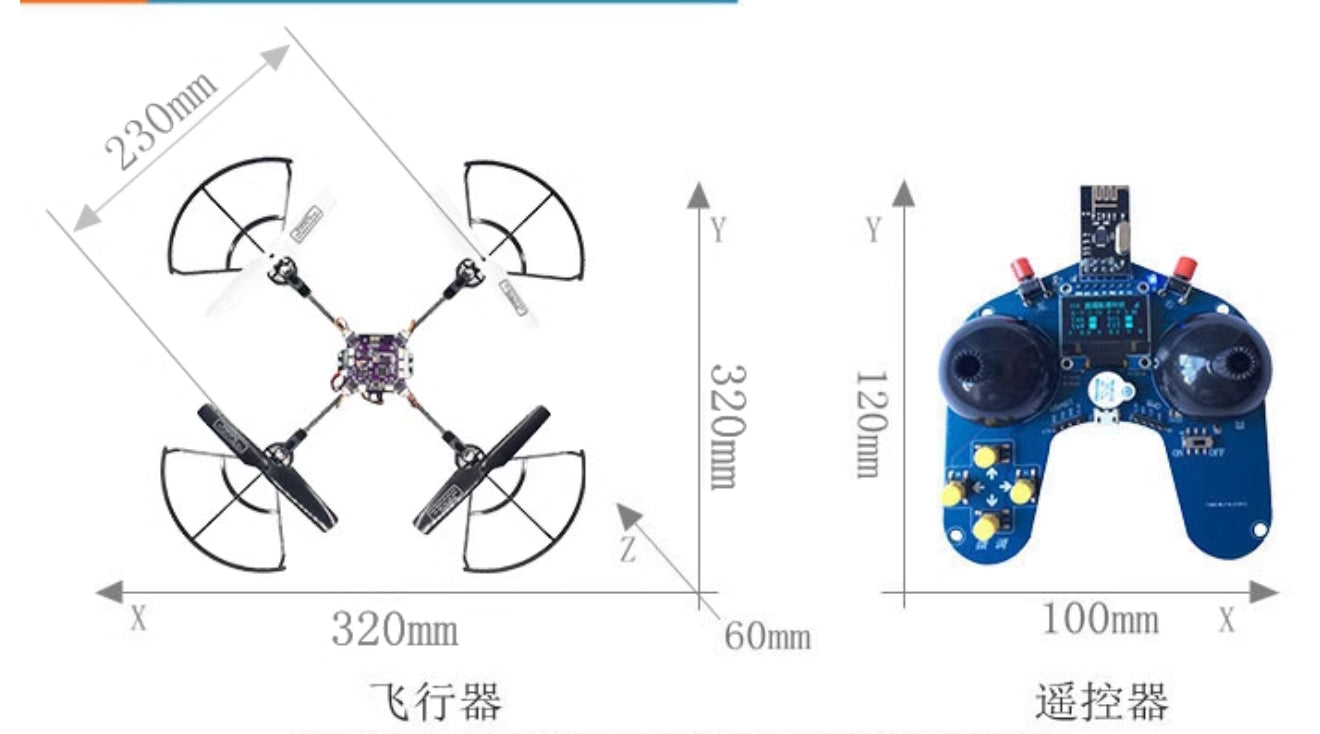
- Çerçeve Boyutu: 320mm x 230mm
- Ek Bağlantı Noktaları: SPI x1, UART x2, IIC x1, USB GÇ x1
- Yük Kapasitesi: 60 gr
Uzaktan Kumanda
- Ana Çip: STM32F103C8T6
- Kablosuz Modül: NRF24L01 (SI24R1)
- Görüntülemek: 0,96 inç OLED
- Güç: 3.7V 380mAh pil
- Kontrol Mesafesi: >50m (açık alan)
- Boyut: 12cm x 10cm
- Ağırlık: 60 gr
- Ek Özellikler: Kalibrasyon düğmeleri, görselleştirilmiş PID ayar arayüzü
Paket İçeriği
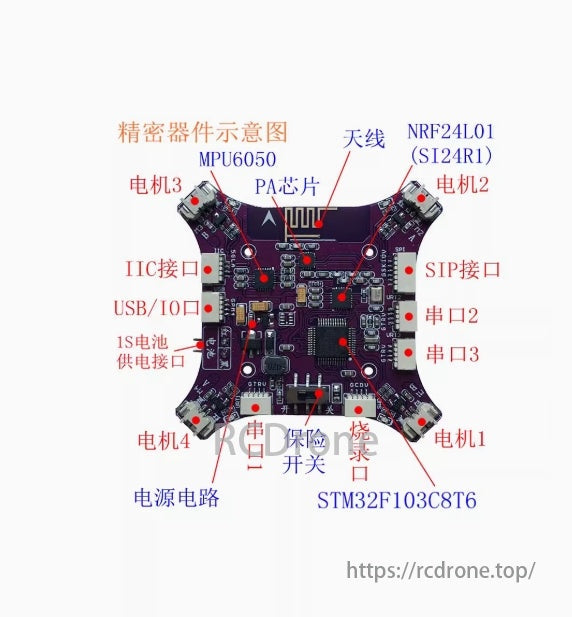
- Önceden Monte Edilmiş Elektroniklerle Quadcopter Çerçevesi (STM32F103C8T6 tabanlı uçuş kontrolörü, MPU6050, SPL06-001, PMW3901).
- STM32 Kablosuz Uzaktan Kumanda (OLED ekran ve NRF24L01 modülü ile).
- Piller:
- 3.7V 1200mAh Lityum Pil x1 (10 dakikalık uçuş süresi)
- 3.7V 380mAh Lityum Pil x1 (5 dakikalık uçuş süresi)
- Yedek Pervaneler (4 adet)
- USB Şarj Kablosu (3,7 V–4,2 V uyumlu)
- Bağlantı Kabloları (çeşitli)
- Hassas Tornavida
- PID Hata Ayıklama Rafı
- Kapsamlı Kullanıcı Kılavuzu ve Eğitimler (PDF ve video).
Vurgulanan Ek Özellikler
- Hassas Bileşen Yerleşimi: Lehimlenen her parça, güç, SPI, IIC, USB ve motor konnektörleri için portlar da dahil olmak üzere işaretlenmiştir.
- Modüler Hata Ayıklama Araçları: Optik akış ve barometrik sensör yerleşimi, PID ayarlaması için hassas uçuş verilerini garanti eder.
- Kalkınma Kurulu Uzantıları: Havadan fotoğraf çekimi ve video kaydı için kamera ve sensör entegrasyonuna olanak sağlar.
- Görselleştirilmiş Arayüz: Quadcopter verileri, hata ayıklama ve optimizasyon amacıyla PC yazılımı aracılığıyla gerçek zamanlı olarak görüntülenir.
Uygulamalar:
- Eğitim Amaçlı Kullanım: STEM öğrenme projeleri ve mühendislik dersleri için mükemmeldir.
- Yarışmalar: İçin idealdir Kendin yap drone zorluklar ve robotik yarışmaları.
- Hobi sahipleri: Teknoloji meraklıları ve üreticileri için ilgi çekici bir proje.
- Gelişmiş Geliştirme: Özel uygulamalar için ikincil geliştirmeyi destekler.
Güvenlik Uyarısı:
Dahil edilen hata ayıklama rafını kullanarak güvenli test koşullarını sağlayın. Kalabalık veya tehlikeli alanlarda uçmaktan kaçının. Montaj talimatlarını izleyin ve lehimli bileşenleri dikkatli bir şekilde kullanın.
Modüler tasarımı, açık kaynaklı esnekliği ve kapsamlı öğrenme kaynaklarıyla STM32 DIY Açık Kaynaklı Quadcopter Kiti, drone teknolojisi ve programlamada ustalaşmanıza giden yoldur.




Bu, yüksek kaliteli video iletimi ve alımı için tasarlanmış, STM3ZF103C8T6F çipli televizyon sistemleri için bir PCB kart düzeneğidir.


OnF STM32F Mavi Hap, %7 i: STM32 Yüksek Frekans BRB+, 10 Ohm x 7 HhJfV: STM32 Uzaktan Kumanda. Ekran: 0,96 İnç OLED IM Et: 2,4C IMHM: ~20°C ila ~60°C JE+HFZ: >50x (Watt), EFt) 7ARh: 12cm x 6cm InLaR: 3,7V, 380mAh, Ağırlık: 60g
Related Collections