SU17 Araştırma Drone - MID-360 LiDAR, Dört Kameralı SLAM, EGO-Swarm ile PX4 Açık Kaynaklı Endüstriyel Drone Geliştirme
SU17 Araştırma Drone - MID-360 LiDAR, Dört Kameralı SLAM, EGO-Swarm ile PX4 Açık Kaynaklı Endüstriyel Drone Geliştirme
RCDrone
Teslim alım stok durumu yüklenemedi
Genel bakış
SU17 Araştırma İHA'sı, yüksek performanslı bir dört pervaneli helikopterdir. 6000mAh pil, MID-360 LiDAR 3D haritalama için dörtlü kamera SLAM sistemi hassas yerelleştirme ve entegre GPS+GLONASS konumlandırma. Kalkış ağırlığı ile 2,3 kilo ve bir 200 gr yük kapasitesi, sunar 21 dakikalık uçuş süresi görsel konumlandırma modunda. Prometheus yazılımı tarafından desteklenmektedir, hedef tanıma, yol planlama ve otonom navigasyonu destekler ve bu da onu bir endüstri sınıfı araştırma ve inovasyon için çözüm.
Donanım Parametreleri
Uçak
| Parametre | Tanım |
|---|---|
| Uçak Tipi | Dört pervaneli helikopter |
| Kalkış Ağırlığı (Yaklaşık) | 2,3 kg (koruyucu kapak ve pil ile) |
| Çapraz Mesafe | 320 mm |
| Boyutlar | Uzunluk: 442 mm, Genişlik: 388 mm, Yükseklik: 174 mm (koruyucu kapak hariç) |
| Maksimum Yük Kapasitesi | 200 gr |
| Havada asılı kalma uçuş süresi | Yaklaşık 13 dk (yüzde 100'de gezinme, 0'ın altına düşmeme) görsel konumlandırma: 21 dk |
| Uçuş Doğruluğu | GPS: Dikey ±1,5 m, Yatay ±2,0 m |
| 3D LiDAR SLAM: Dikey ±0,08 m, Yatay ±0,08 m | |
| 4 kameralı görsel SLAM: Dikey ±0,05 m, Yatay ±0,05 m | |
| Rüzgar Direnç Seviyesi | Seviye 4 |
| Çalışma Sıcaklığı | -10°C ila 40°C |
| Ana MCU Çipi | STM32H743 |
| IMU | ICM42688/BMI088 |
| Barometre | MS5611 |
| Pusula | QMC5883L |
| Arayüz | USB Tip-C |
Gemideki Bilgisayar
| Parametre | Tanım |
|---|---|
| İşlemci | Intel Core i5-8365U |
| Bellek Kapasitesi | 8 GB |
| Bellek Frekansı | LPDDR3@2133MHz |
| Depolamak | 256 GB NVMe SSD |
| Ağ Bağlantı Noktası | Baidu Apollo Ethernet X2, 12V@3A power kaynağı, IEEE 1588-2008'i (PTP v2) destekler |
| Seri Port | TTL Seri Port X2, 5V/3.3V@500mA power tedarik |
| USB | Tip-C X2 (1x USB2.0, 1x USB3.0) |
| HDMI | HDMI 1.4 |
Güç Pil
| Parametre | Tanım |
|---|---|
| Örnek | SU17-L |
| Pil Türü | Yüksek basınçlı lityum polimer pil |
| Anma Gerilimi | 26,4 V (Maksimum), 21 V (Minimum) |
| Depolama Voltajı | 22.8V (Tipik) |
| Nominal Kapasite | 6000mAh |
| Ağırlık | 680 gr |
| Boyutlar | Uzunluk: 85,2 mm, Genişlik: 86.5 mm, Yükseklik: 135 mm |
Uzaktan Kumanda
| Parametre | Tanım |
|---|---|
| Örnek | QE-2 |
| Kanallar | 8 |
| İletim Gücü | 18~20 dBm |
| Ağırlık | 294,1 gr |
Dengeleme halkası
| Parametre | Tanım |
|---|---|
| Kontrol edilebilir açı | -90° ~ 30° (Eğim Ekseni) |
| Akış Protokolü | RTSP (Standart) |
| Kodlama Biçimi | H.264 |
| Çözünürlük | 1080P @ 25fps |
| Çapraz FOV (D) | 120° |
| Dikey FOV (V) | 54° |
| Yatay FOV (H) | 95° |
Görüntü İletimi
| Parametre | Tanım |
|---|---|
| Çalışma Frekansı | 2,4 GHz |
| İletim Gücü | 18dBm |
| İletişim Aralığı | 3Km (Hiçbir Engel, Hiçbir Girişim Yok) |
| Görüntü Aralığı | 1Km (Minimum Müdahale, Engel Yok) |
| Maksimum Bant Genişliği | 40Mbps |
Dörtlü Derinlik Kamerası
| Parametre | Tanım |
|---|---|
| Vizyon Hızlandırıcı | Intel Movidius Myriad X VPU |
| Maksimum Çözünürlük | 1296x816 |
| Maksimum Kare Hızı | 1280x800 @ 120fps |
| Kepenk Tipi | Küresel Kepenk |
| Kodlama Biçimi | 8/10-bit Tek Akış |
| Görüş alanı | 150° Diyagonal FOV, 127,4° Yatay FOV, 79,7° Dikey FOV |
| Sensör Sayısı | 4 (2 Ön + 2 Arka) |
| IMU | Vücut kitle indeksi270 |
GNSS
| Parametre | Tanım |
|---|---|
| Yatay Doğruluk | 1,5 m CEP (SBAS ile) |
| Hız Doğruluğu | 0,05 m/sn |
| Çalışma Modu | GPS + GLONASS + BDS + GALILEO + SBAS + QZSS |
Şarj cihazı
| Parametre | Tanım |
|---|---|
| Örnek | LK150-2640500 |
| AC Giriş Voltajı | 100V ~ 240V |
| DC Giriş Voltajı | 26.4V |
| Ağırlık | 460 gr |
| Şarj Akımı | 5A |
3D LiDAR
| Parametre | Tanım |
|---|---|
| Örnek | ORTA-360 |
| Lazer Dalga Boyu | 905 mil |
| Ölçüm Aralığı | 40 m @ %10 Yansıtma |
| Görüş alanı | Yatay 360°, Dikey -7° ~ 52° |
| Minimum Aralık | 0,1 m |
| Nokta Frekansı | 10 Hz (Tipik) |
| Nokta Çıktısı | 200.000 puan/sn |
| Veri Arayüzü | 100 BASE-TX Ethernet |
| Veri Senkronizasyonu | IEEE 1588-2008 (PTP v2), GPS |
| Dahili IMU | ICM40609 |
| Güç Kaynağı Voltajı | 7~27V |
| Boyutlar | 65 mm (G) x 65 mm (D) x 60 mm (Y) |
| Ağırlık | 115 gr |
| Çalışma Sıcaklığı | -20°C ~ 55°C |
Yazılım Parametreleri
Gemideki Bilgisayar
| Parametre | Tanım |
|---|---|
| Örnek | Intel Core i5-8365U |
| Sistem | Ubuntu 20.04 |
| Kullanıcı adı | amov |
| Şifre | amov |
| ROS | akılcı |
| Açık CV | 4.7.0 |
| Görsel Konumlandırma Sistemi | BSA_SLAM V1 |
Prometheus Yazılımı
| Parametre | Tanım |
|---|---|
| Sürüm | sürüm 2.0 |
| PrometheusYer İstasyonu Sistemi | v1.24.11.27 (Wiki yayın kaydına dayalı son sürüm) |
Detaylar
SU17 Araştırma Sürümü
Endüstri sınıfı kalitede araştırma dronu
- İsteğe bağlı 3D LiDAR: Haritalama, konumlandırma ve navigasyon engellerinden kaçınmayı sağlar.
- Prometheus Otonom Drone Yazılımı:Drone kontrolünde hızlı ustalık kazanmak için demolarla dolu.
- Endüstri sınıfı uçuş platformu: Kararlı ve açık, araştırma drone performansı için yeni bir standart belirliyor.

Temel Özellikler
SU17 Araştırması İHA Geliştirme Platformu (SU17 olarak anılır) uçuş kontrolörleri, yerleşik bilgisayarlar, dörtlü kamera SLAM modülleri, bulut kameraları ve yüksek düzeyde entegrasyon için görüntü iletim modüllerini içeren entegre bir tasarım benimser ve donanım kararlılığını ve güvenilirliğini önemli ölçüde artırır. Prometheus otonom drone yazılımıyla donatılan SU17, çeşitli uçuş kontrol senaryoları için hedef tanıma, izleme ve yol planlama gibi özellikleri destekler.
İsteğe bağlı olarak, 3D LiDAR SLAM'ı elde etmek için FAST-LIO algoritmasıyla birleştirilmiş MID-360 3D LiDAR'ı entegre ederek hassas çevresel algılama ve konumlandırma bilgisi sunar. EGO-Swarm yol planlama algoritmasıyla eşleştirildiğinde, karmaşık ortamlarda verimli gerçek zamanlı 3D haritalama ve engel önleme sağlar.




Prometheus V2 Yazılım Sistemi
Geliştirme platformu, ROS ve Prometheus açık kaynak çerçevesi üzerine inşa edilmiştir ve verimli yeniden programlama için zengin işlevler ve kapsamlı ikincil geliştirme API'leri sunar. Konumlandırma bilgilerine, uçuş modlarına, pil durumuna, IMU verilerine ve diğer drone durumu ve sensör veri arayüzlerine erişim sağlar ve ayrıca konum, hız, ivme ve tutum için kontrol arayüzleri sunar.
Ek olarak, ilgili API'ler için kullanım örnekleri içerir. Dahası, drone uçuş operasyonları için güvenlik kontrol işlevlerine sahiptir (çarpışma önleme), anormal koşullar altında otomatik inişe olanak tanır, çarpışma riskini azaltır ve daha güvenli bir geliştirme süreci sağlar.

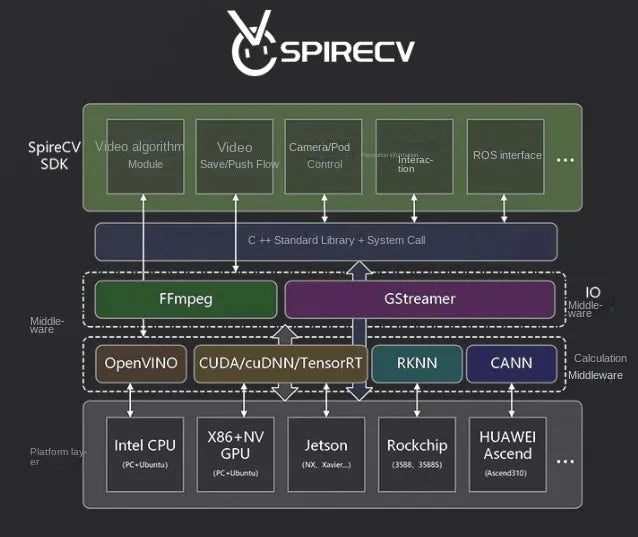
SpireCV Vizyon Kütüphanesi
SpireCV Vision Library, akıllı İHA sistemleri için özel olarak tasarlanmış gerçek zamanlı bir görüntü işleme SDK'sıdır. Gimbal ve kamera kontrolü, video depolama ve akışı, hedef tespiti, tanıma ve izleme gibi işlevler sağlar.
Bu SDK, akıllı İHA sistemleri geliştiricileri için yüksek performans, güvenilirlik ve akıcı bir arayüz sunmayı amaçlamaktadır. Özellik açısından zengin bir görsel işleme çözümüyle, geliştiricilerin çeşitli karmaşık görüş tabanlı uygulamaları verimli bir şekilde uygulamasını sağlar.
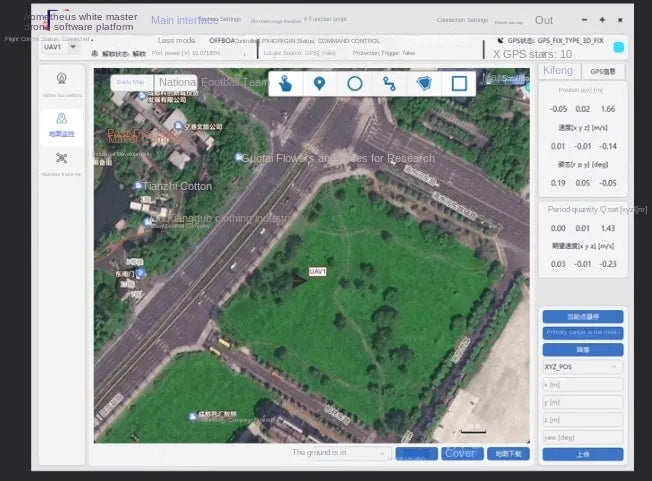
Prometheus Yer İstasyonu
Prometheus Yer İstasyonu, Qt teknolojisi kullanılarak inşa edilen Prometheus sistemine dayalı olarak geliştirilen bir insan-drone etkileşim arayüzüdür. Prometheus sisteminin işlevlerinin hızlı bir şekilde çoğaltılmasını sağlayarak, drone durumu ve kontrol verilerinin gerçek zamanlı izlenmesini ve 3B görselleştirilmesini sağlar.
Kullanıcılar yer istasyonu aracılığıyla tek tıklamayla kalkış, mevcut konumda gezinme, iniş ve konum kontrolü gibi komutları yürütebilir. Ayrıca sistem, kullanıcı tanımlı komut dosyalarını başlatmak veya özel mesajlar göndermek için özel işlev düğmelerini destekler ve kullanıcı işlemlerinin rahatlığını, verimliliğini ve ölçeklenebilirliğini önemli ölçüde artırır.
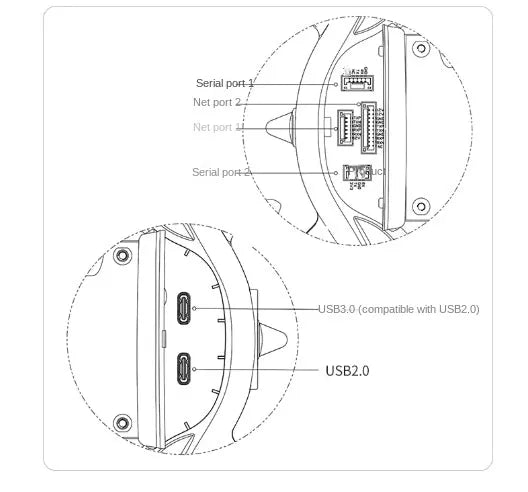
Güçlü Genişleme
Donanım Genişletme Bağlantı Noktaları
-
Seri Port 1
-
Seri Port 2
-
Ağ Bağlantı Noktası 1
-
Ağ Bağlantı Noktası 2
-
USB Bağlantı Noktaları:
- USB 3.0 (USB 2.0 ile uyumludur)
- USB 2.0
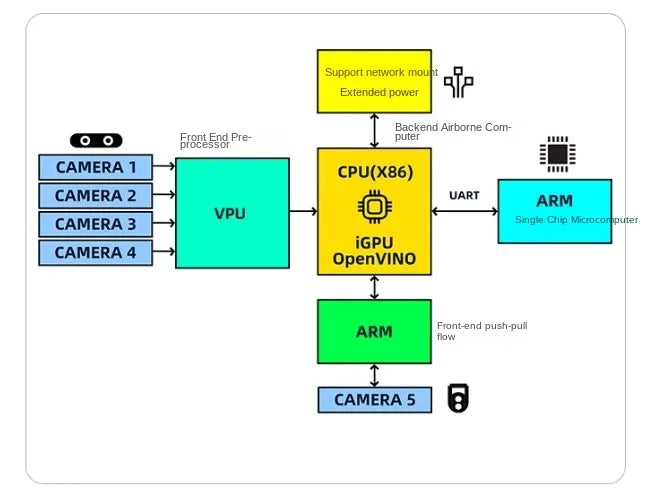
Donanım Çerçevesi
Görselde SU17 drone'unun donanım mimarisi gösterilmektedir ve gelişmiş veri işleme ve sistem kontrolü için çeşitli bileşenlerin entegrasyonu vurgulanmaktadır:
-
Kameralar (Kamera 1-4):
Birine bağlı VPU (Görüntü İşleme Birimi) ön uç ön işleme için. -
VPU:
Birden fazla kameradan gelen görsel verileri işler ve bunları işlem birimlerine iletir. -
İşlemci (X86) ile iGPU ve OpenVINO:
Arka uç işlemleri için birincil hesaplama birimi olarak hizmet verir ve gelişmiş hesaplama gücü için ağa bağlı genişleme yeteneklerini destekler. -
ARM Tek Çipli Mikrodenetleyici:
Ek kontrol işlevleri için UART arayüzü aracılığıyla CPU ile etkileşime girer. -
Ön Uç Boru Hattı ve Kamera 5:
Daha fazla veri akışı sağlamak için özel bir ARM işlemcisi tarafından yönetilir.
Bu çerçeve, gerçek zamanlı görüntü analizini, gelişmiş hesaplama görevlerini ve donanım bileşenleri arasında sorunsuz iletişimi destekleyen birden fazla işlem birimini entegre eder. Araştırma ve geliştirme uygulamalarında karmaşık işlemlerin verimli bir şekilde ele alınmasını sağlar.
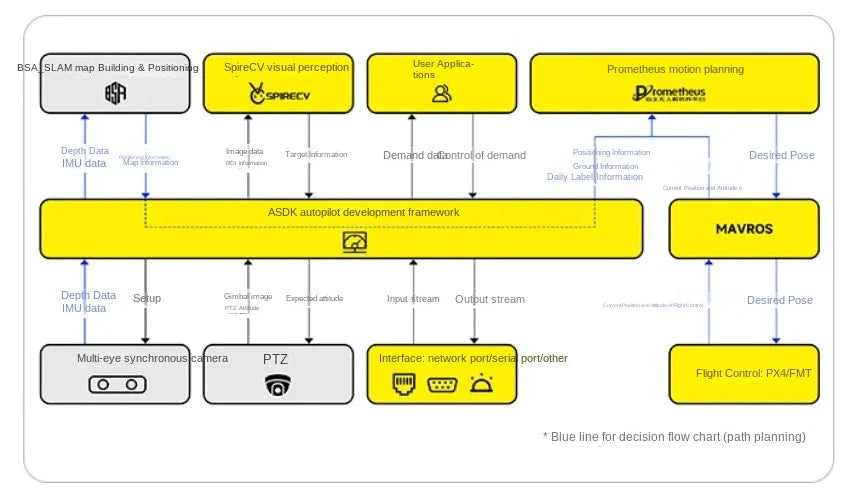
Yazılım Çerçevesi
Şemada SU17 İHA'nın yazılım mimarisi gösterilmektedir ve otonom işlevsellik için çeşitli sistemlerin entegrasyonu vurgulanmaktadır:
-
BSA_SLAM (Haritalama ve Yerelleştirme):
- Mekansal haritalama ve konumlandırma verileri sağlar.
- Doğru ortam algısı için derinlik ve IMU sensör girişlerini entegre eder.
-
SpireCV Vizyon Algısı:
- Nesne tespiti, ROI bilgisi ve hedef takibi dahil olmak üzere görsel verileri işler.
-
Kullanıcı Uygulamaları:
- Veri görselleştirme ve komut girişi gibi kullanıcı odaklı görevler için arayüzler.
-
Prometheus Hareket Planlaması:
- Pozisyon, hız ve hedef verilerini kullanarak yörünge planlamasını gerçekleştirir.
-
ASDK Otonom Sürüş Çerçevesi:
- Sensörler, kameralar, bulut modülleri ve harici arayüzler arasındaki veri akışını yöneten merkezi işlem katmanı olarak hizmet verir.
- Çoklu giriş/çıkış kanalını destekler (örneğin, ağ portları, seri portlar).
-
MAVROLAR:
- Uçuş durumu ve pozisyon kontrolü için uçuş kontrol sistemleri (PX4/FMT) ile iletişim kurar.
-
Bulut Modülü ve Çoklu Senkronizasyon Kameraları:
- Gelişmiş işleme için bulut tabanlı verileri entegre eder.
- Yüksek hassasiyetli işlemler için görsel girdileri senkronize eder.
Mavi Hatlar:Yörünge planlaması için karar alma yollarını temsil eder.
Bu mimari, sağlam drone operasyonu için çeşitli donanım ve yazılım bileşenleri arasında kesintisiz iletişim sağlayan modüler, genişletilebilir bir tasarıma sahiptir.
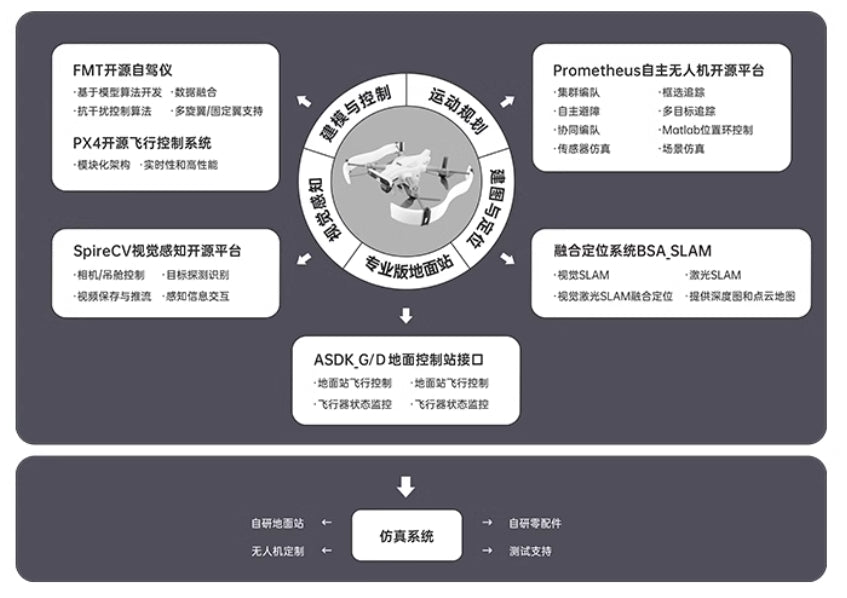
Akıllı Açıklık: Entegre İHA Sistem Çözümü
Diyagram, çeşitli bileşenler arasında modülerliği ve entegrasyonu vurgulayarak drone sistemleri için kapsamlı ve açık bir mimari sunmaktadır:
-
Çekirdek Bileşenler:
- FMT Açık Kaynaklı Otopilot: Modüler geliştirmeye dayalı güvenilir uçuş kontrolü sağlar, farklı ortamları destekler ve veri entegrasyonunu sağlar.
- PX4 Uçuş Kontrol Sistemi: İstikrarı garanti eder ve gelişmiş modüler özelleştirmeyi destekler.
- SpireCV Vizyon Algılama Platformu: Nesne algılama, izleme ve gerçek zamanlı video akışı da dahil olmak üzere görüntü işleme üzerine odaklanır.
-
Temel Çerçeveler:
- Prometheus Otonom İHA Platformu: Çoklu drone kontrolü, hareket planlama, işbirlikli navigasyon ve gerçek dünya simülasyonlarını içerir.
- BSA_SLAM Sistemi: Hassas konumlandırma ve haritalama için görüş tabanlı SLAM ve LiDAR tabanlı SLAM'ı birleştirir.
- ASDK G/D Yer İstasyonu Kontrol Arayüzü:Yer istasyonları ile İHA'lar arasında izleme ve gerçek zamanlı ayarlamalar için kesintisiz iletişimi sağlar.
-
İş Akışı Entegrasyonu:
- Hareket planlama, çevre haritalama ve otonom navigasyon gibi süreçleri vurgular.
- Yörünge kontrolü, engel kaçınma ve gerçek zamanlı veri yönetimi için profesyonel yer istasyonlarıyla entegrasyon.
-
Simülasyon Desteği:
- Otonom görev testleri, İHA kontrolü ve bileşen doğrulaması için bir simülasyon sistemi içerir.
Bu sistem, çeşitli senaryolarda araştırma, uygulama ve test için ölçeklenebilir yeteneklere sahip, otonom İHA geliştirme için son teknoloji bir çözüm sunmaktadır.
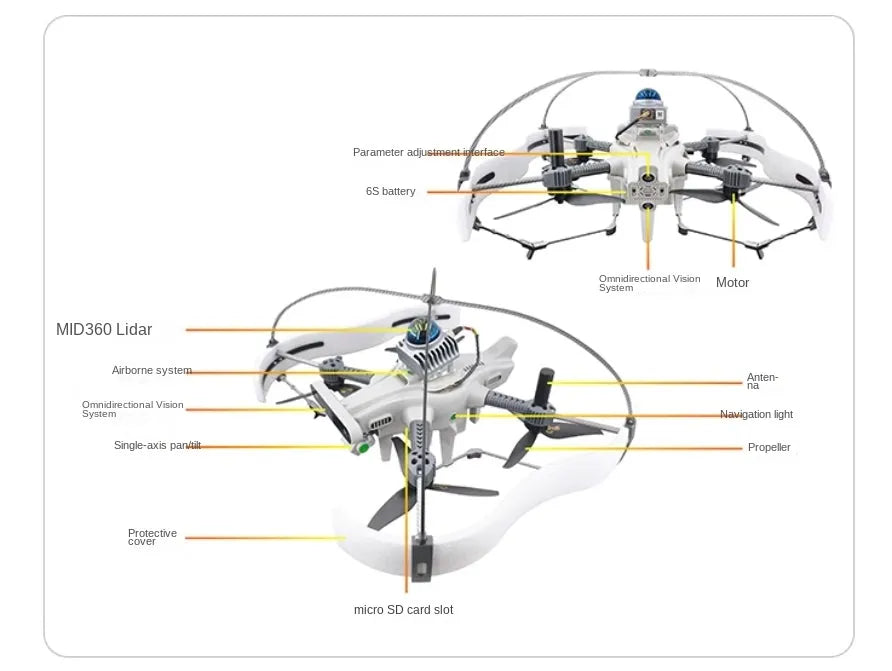
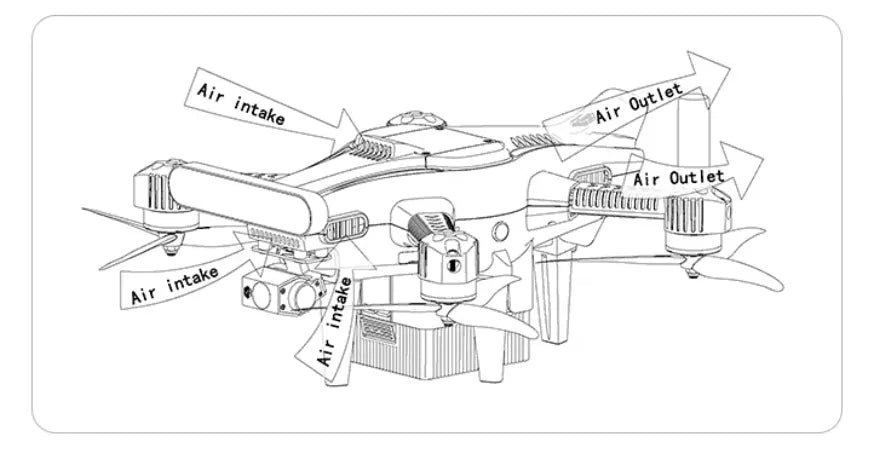
SU17 araştırma insansız hava aracının yapısal bileşenleri, istikrarını ve gelişmiş tasarımını vurgulamaktadır. Temel özellikleri arasında şunlar yer almaktadır: MID360 LiDAR hassas haritalama için, çok yönlü görüş sistemi kapsamlı çevresel algı için, tek eksenli gimbal sabitlenmiş görüntüleme ve sağlam bir 6S pil genişletilmiş güç için. Diğer temel bileşenler şunlardır pervane sistemi, anten, seyir ışıklarıve bir mikro SD kart yuvası veri depolama için. Tasarım, çeşitli araştırma uygulamaları için güvenilirlik ve yüksek performans sağlayan son teknoloji donanımı entegre eder.
Related Collections