








WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, 200 Hz – 6 Eksenli İvmeölçer Jiroskop İklinomeri, ROS/Matlab
WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, 200 Hz – 6 Eksenli İvmeölçer Jiroskop İklinomeri, ROS/Matlab
WitMotion
Teslim alım stok durumu yüklenemedi
Genel Bakış
WitMotion HWT601-AGV-485, AGV robotları, dronlar ve otonom platformlar için tasarlanmış 6 eksenli bir tutum/yön sensörüdür. 3 eksenli ivme + 3 eksenli açısal hız kombinasyonu yapar ve 3 eksenli açı &ve quaternion değerlerini RS485 (Modbus) üzerinden maksimum 200 Hz hızında iletir. Modül, Kalman dinamik filtreleme, yüksek hassasiyetli döner masa kalibrasyonu, otomatik/manuel kayma alma, güç kesildiğinde yön kaydetmek için yedek güç ve IP67 suya ve toza dayanıklı bir kasa ile donatılmıştır. Ayrıca, senkronize tutum ölçümü için çok seviyeli kaskad desteği (32 birime kadar) sunmaktadır.
Ana Özellikler
-
Yüksek hassasiyetli açı: XY hassasiyeti 0.1°; Z hassasiyeti 0.1° (HWT601-AGV-485) / 0.15° (WT601-AGV-485).
-
Stabil jiroskop kayması: XY 5°/s; Z 2°/s (HWT601-AGV-485) / 5°/s (WT601-AGV-485).
-
Geniş giriş 9–36 V, çalışma akımı ≈ 8 mA @12 V.
-
RS485 Modbus, baud 4,800–230,400 bps.
-
Örnekleme: istek–yanıt okuma hızı 200 Hz kadar.
-
Algoritma: Kalman filtresi füzyonu ve özel AGV yön algoritması.
-
Yazılım: canlı panolar, eğri grafikleri, 3D görselleştirme (araba/sphere/küp/düzlem), yapılandırma (kayma, açı referansı, ivme kalibrasyonu, ölçek faktörleri), veri kaydı &ve doğrudan kaydetme, ve Matlab içe aktarma.
-
Geliştirici dostu: ROS, Linux, C/C#, Python için örnek programlar ve kod desteği.
-
Çevresel: IP67, -40~80 °C (-40~85 °C masa varyantı gösterilmektedir).
-
Art arda gelen: aynı anda tutum ölçümü için RS485 üzerinde 32'ye kadar sensör destekler.
Kurulum Kılavuzları
-
Sensörü sıkı, düz, stabil bir yüzeye monte edin; düzensiz tabanlar açı hatasına neden olur (bkz. ŞEKİL.1–2).
-
Sensor eksenini ölçülen eksenle paralel tutun; eksenler arası açılardan kaçının (bkz. ŞEKİL.3–4).
-
Bu model sadece yatay montajı destekler.
Yazılım &ve Görselleştirme
-
Güçlü Veri Gösterge Paneli (açı, oran, ivme, manyetik alan, quaternion, portlar, sıcaklık, voltaj vb.).
-
Konfigürasyon paneli: baud hızı, cihaz adresi, otomatik kaydırma alımı, Z ekseni sıfırlama, ivme kalibrasyonu, açı referansı, manuel pozitif/negatif kalibrasyon ve ölçek faktörleri.
-
3D modeller sezgisel hareket izleme ve gerçek zamanlı eğriler ile dinamik güncellemeler.
-
Ham veri görünümü ve kolay toplama için dosya kaydetme; Matlab analiz içe aktarma desteği.
-
ROS IMU INS demoları: tutum izleme görselleştirmesi ve tutum verisi görüntüleme (yaw/roll/pitch, açısal hız, doğrusal ivme).
html
Özellikler
Arayüz &ve Performans
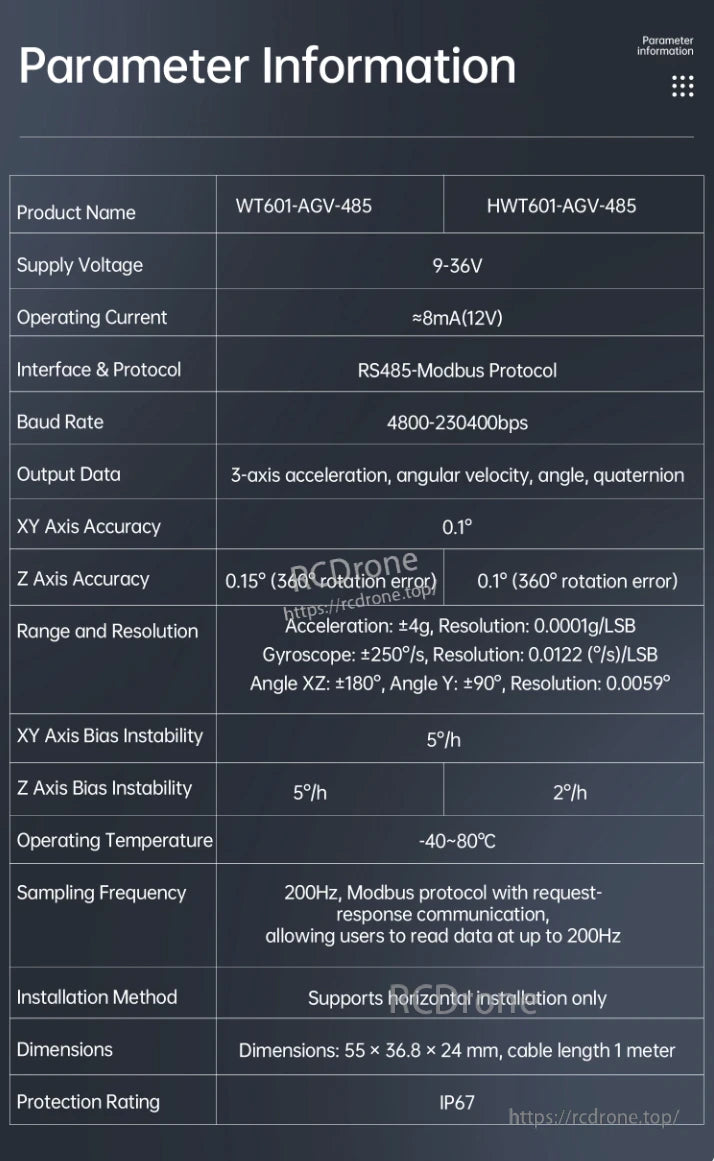
| Ürün | HWT601-AGV-485 | WT601-AGV-485 |
|---|---|---|
| Arayüz / Protokol | RS485 / Modbus | RS485 / Modbus |
| Baud hızı | 4,800–230,400 bps | 4,800–230,400 bps |
| Çıkış verisi | 3 eksenli ivme, açısal hız, açı, quaternion | Aynı |
| Örnekleme frekansı | 200 Hz'ye kadar (istek–yanıt) | 200 Hz'ye kadar |
| XY açı hassasiyeti | 0.1° | 0. 1° |
| Z açı hassasiyeti (360° döngü hatası) | 0.1° | 0.15° |
| İvme aralığı / çözünürlük | ±4 g / 0.0001 g/LSB | Aynı |
| Jiroskop aralığı / çözünürlük | ±250 °/s / 0.0122 (°/s)/LSB | Aynı |
| Açı aralığı / çözünürlük | XZ: ±180°; Y: ±90° / 0.0059° | Aynı |
| Jiroskop kayma kararsızlığı (XY / Z) | 5°/s / 2°/s | 5°/s / 5°/s |
| Sıcaklık katsayısı (XYZ) | 0.002°/°C | 0.002°/°C |
Elektrik, Mekanik &ve Çevre
-
Besleme voltajı: 9–36 V; Çalışma akımı: ≈ 8 mA (12 V)
-
Boyutlar: 55 × 36.8 × 24 mm; Kablo uzunluğu: 1 m
-
Koruma: IP67
-
Çalışma sıcaklığı: -40~80 °C (masa varyantı ayrıca -40~85 °C)
-
Kurulum: Sadece yatay montaj
-
İkili bağlantı: RS485 üzerinde 32 adede kadar birim
Uygulama Alanları
AGV/AMR ve mobil robotlar, dronlar/UAV'lar, insansız lojistik araçlar ve otonom sürüş algılama modülleri.
Model İsimlendirme &ve Seçim
-
HWT601-AGV-485 – daha yüksek Z ekseni hassasiyeti (0.1°) ve daha düşük Z kayma istikrarsızlığı (2°/h).
-
WT601-AGV-485 – standart Z ekseni özellikleri (0.15°, 5°/h).
Z yönlendirme hassasiyeti kritik olduğunda HWT601 modelini seçin.
Detaylar

3 eksenli ivmeölçer, açısal hız, açı ve quaternion ile yüksek hassasiyetli 6 eksenli tutum sensörü. AGV yönlendirme algoritması, IP67 koruma, Kalman filtreleme, otomatik kayma edinimi ve PC yazılım desteği özelliklerine sahiptir.
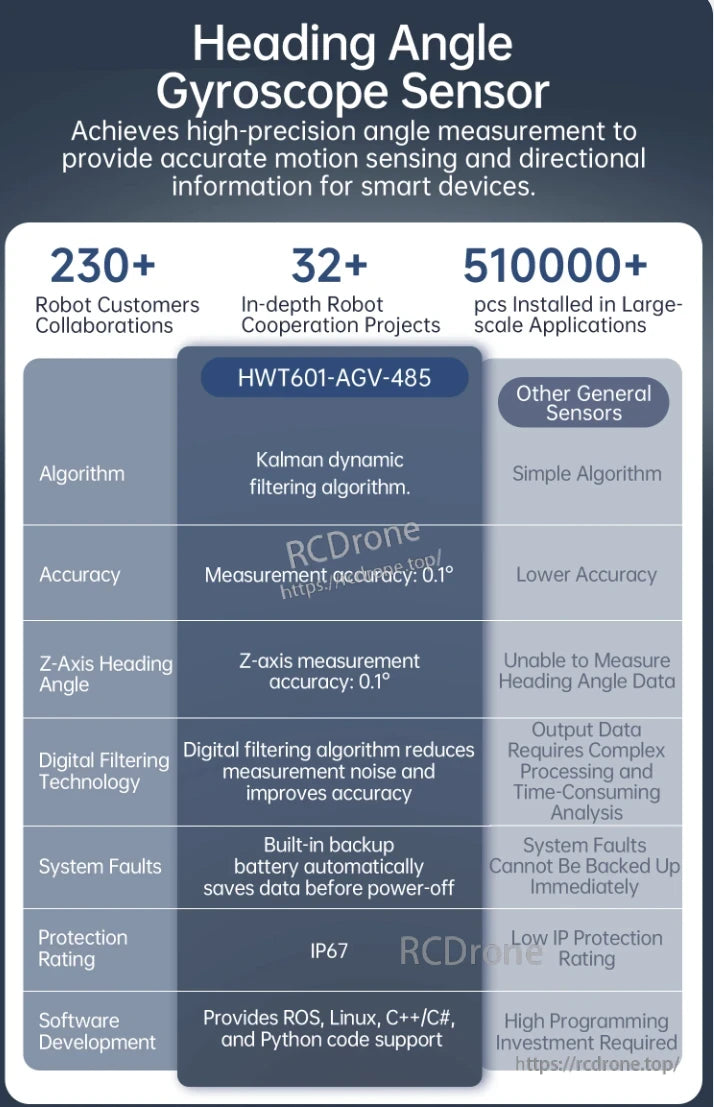
Yön Açısı Jiroskop Sensörü HWT601-AGV-485, Kalman filtreleme ile yüksek hassasiyetli açı ölçümü sunar, 0.1° doğruluk, dijital gürültü azaltma, IP67 koruma sağlar ve ROS, Linux, C++ ve Python'u destekler. 230'dan fazla robot işbirliği ve 510,000+ kurulum bulunmaktadır.
HWT601-AGV-485 IMU, 9-36V güç kaynağı, RS485-Modbus, 200Hz örnekleme, ±4g ivme, ±250°/s jiroskop, IP67 derecelendirmesi ve -40~80°C çalışma sıcaklığı sunmaktadır. Doğru, yüksek çözünürlüklü 3 eksenli veriler sağlar.
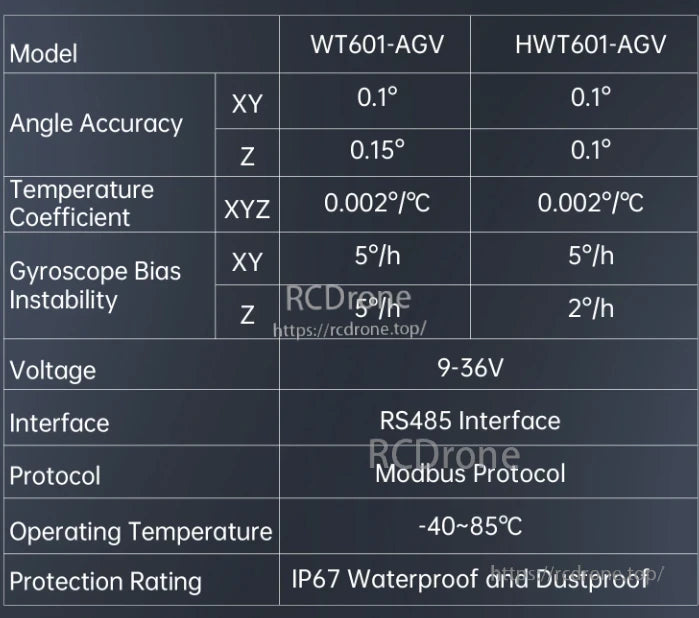
HWT601-AGV IMU, XY ve Z eksenlerinde 0.1° açı hassasiyeti sunarken, XYZ boyunca 0.002°/°C sıcaklık katsayısına sahiptir. Jiroskop kayma kararsızlığı XY için 5°/saat ve Z için 2°/saat olarak belirlenmiştir. 9–36V aralığında çalışır, Modbus ile RS485 kullanır ve -40 ile 85°C arasında işlev gösterir. IP67 derecelendirmesi ile suya ve toza karşı koruma sağlar. WT601-AGV varyantı benzer özelliklere sahiptir ancak Z ekseninde 0.15° hassasiyet ve 5°/saat Z ekseni kayma kararsızlığı sunar. Her iki model de zorlu ortamlarda güvenilir performans sağlar.
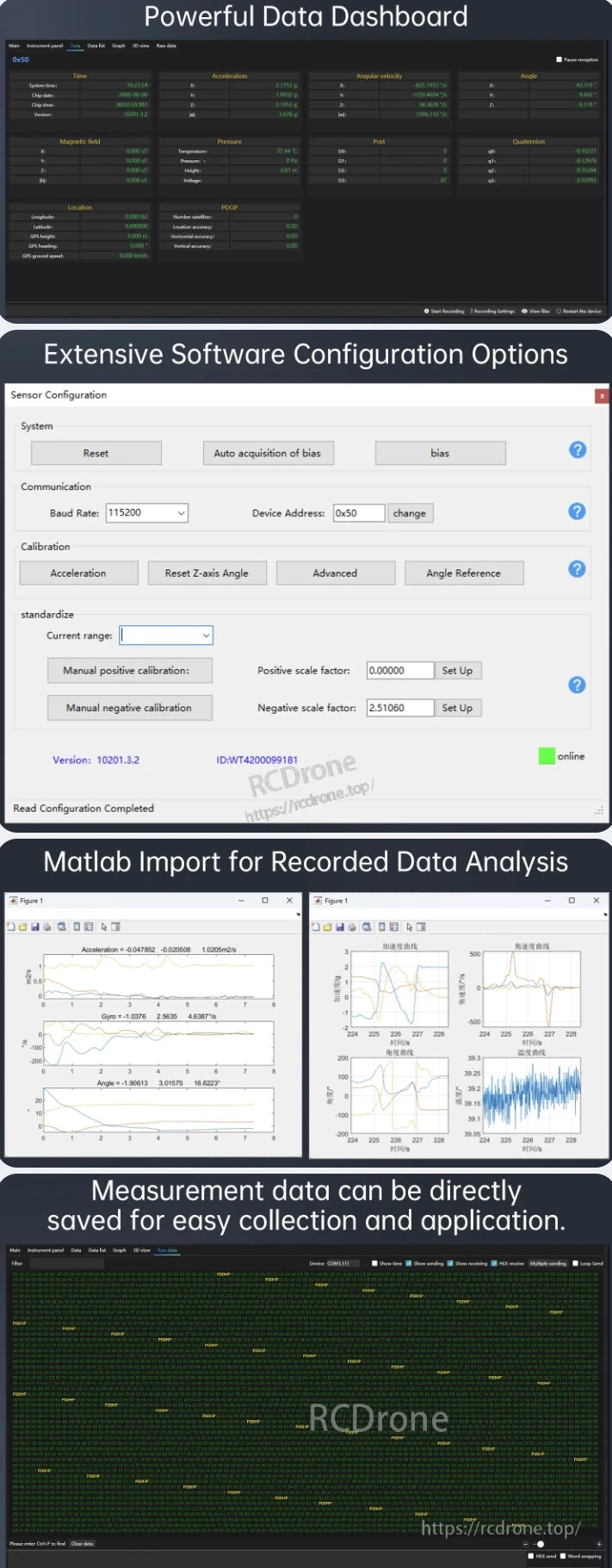
Gerçek zamanlı sensör okumaları, kapsamlı yazılım yapılandırması, analiz için MATLAB içe aktarma ve kolay toplama ve uygulama için doğrudan veri kaydetme ile güçlü bir veri gösterge paneli.
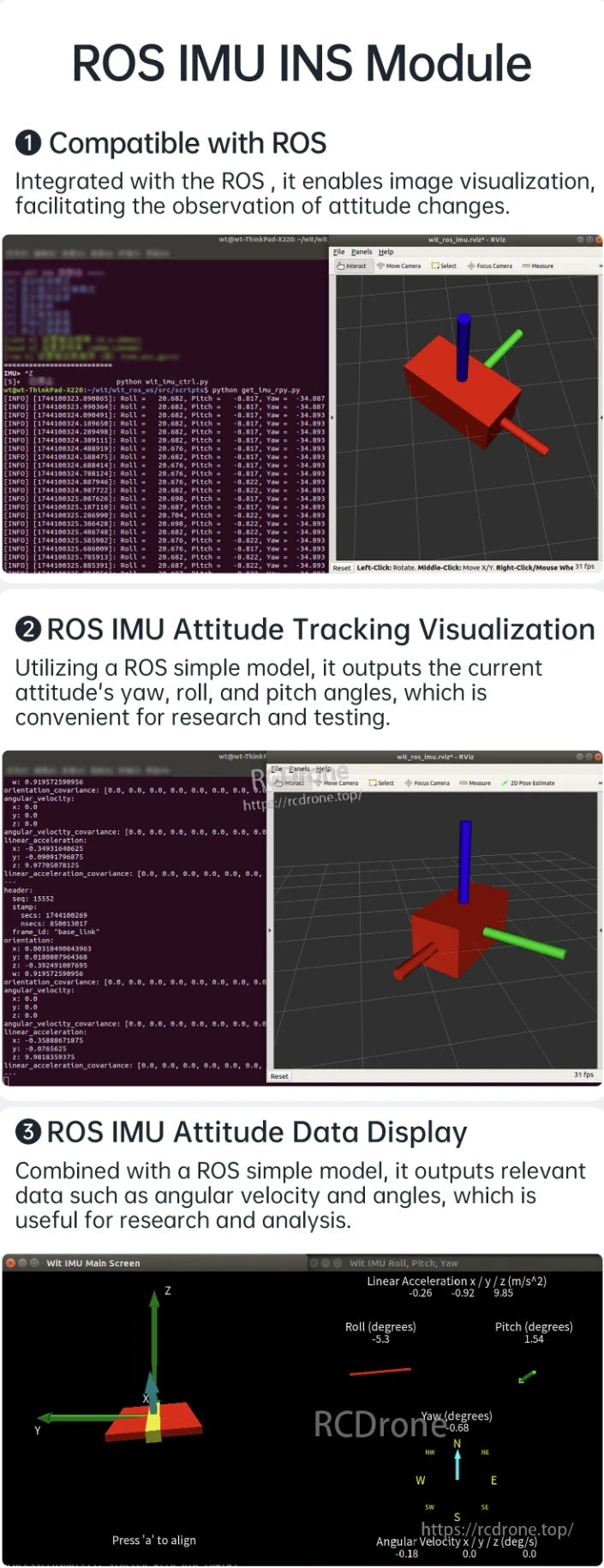
ROS IMU INS Modülü, ROS uyumluluğu sunar, tutum takibini görselleştirir ve araştırma ve analiz için gerçek zamanlı roll, pitch, yaw, açısal hız ve doğrusal ivmeyi gösterir.
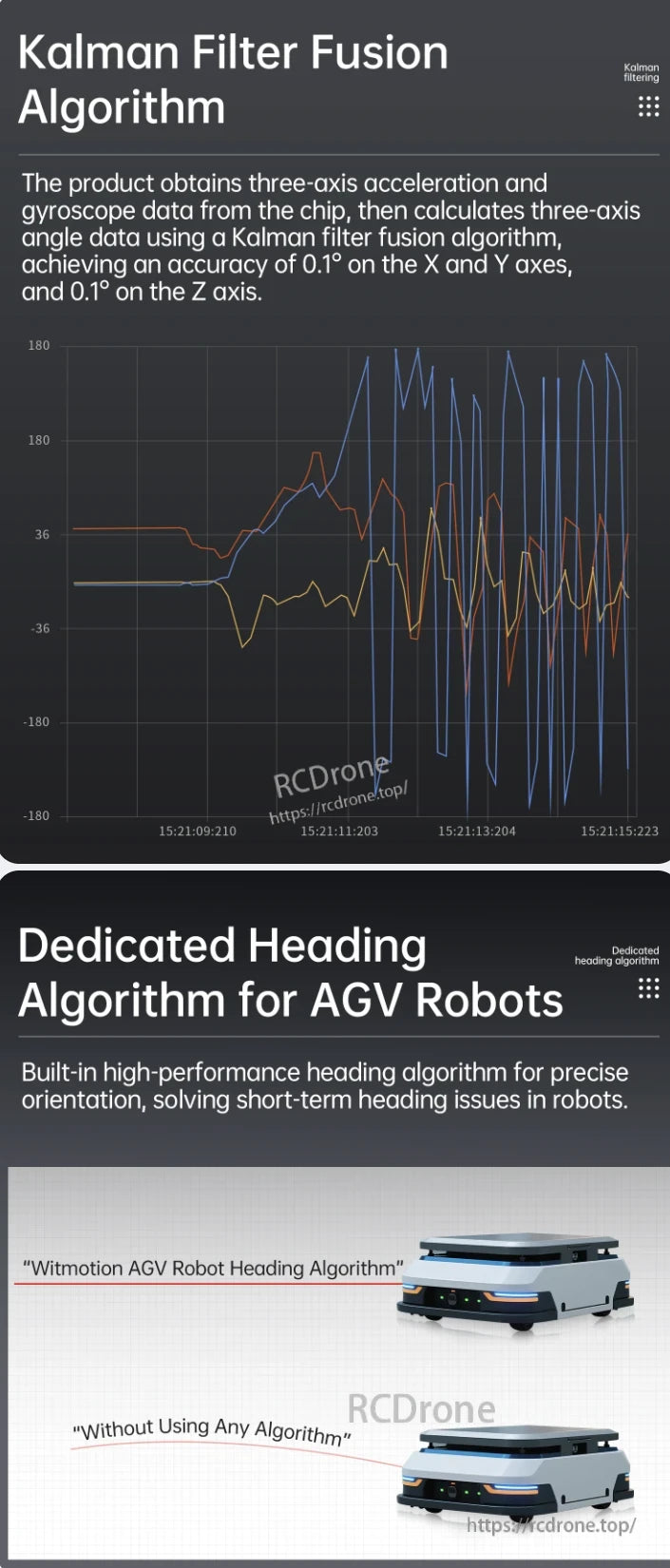
WitMotion HWT601 AGV IMU, Kalman filtre füzyonu kullanarak 0.1° hassasiyetle doğru 3 eksenli açı verisi sağlar. Özel yön algoritması, robotun yönlendirmesini kararlı hale getirir ve bu tür algoritmalar olmayan sistemlere kıyasla performansı önemli ölçüde artırır.
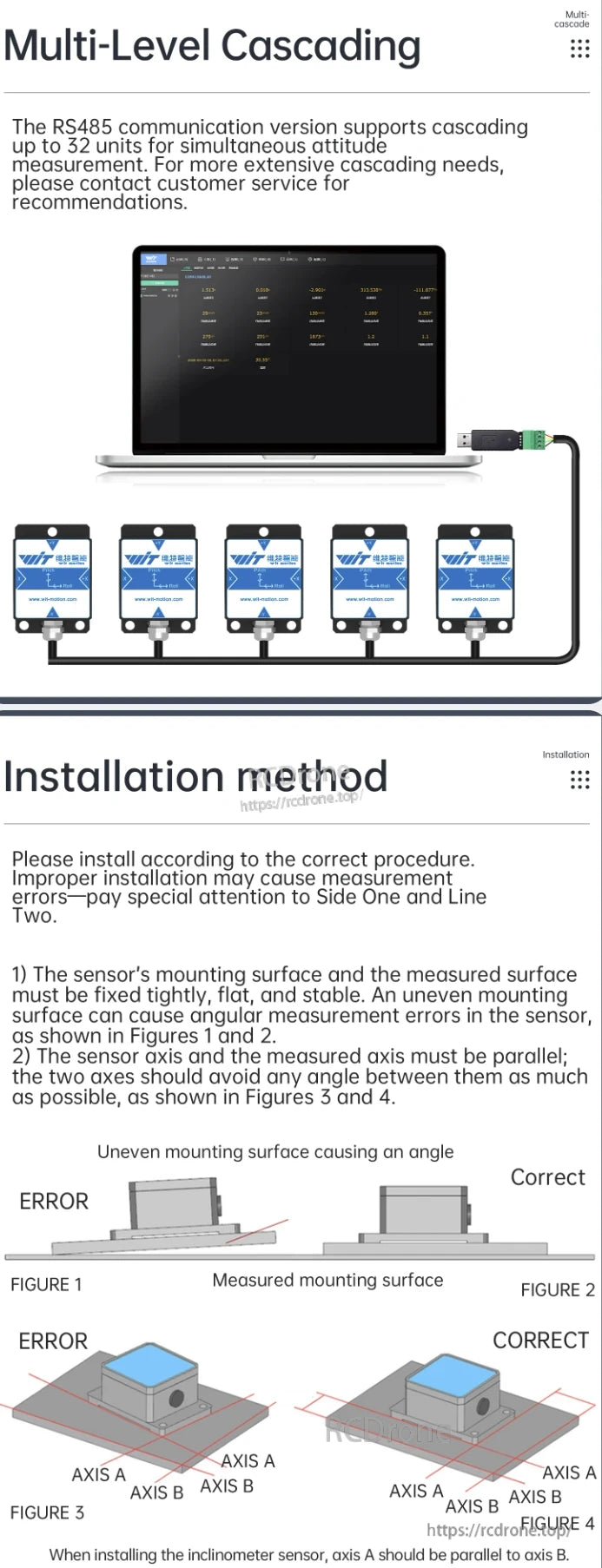
WitMotion HWT601 AGV IMU, tutum ölçümü için RS485 üzerinden 32'ye kadar ardışık birimi destekler. Doğruluk için düz, stabil montaj ve hizalanmış eksenler sağlanmalıdır.
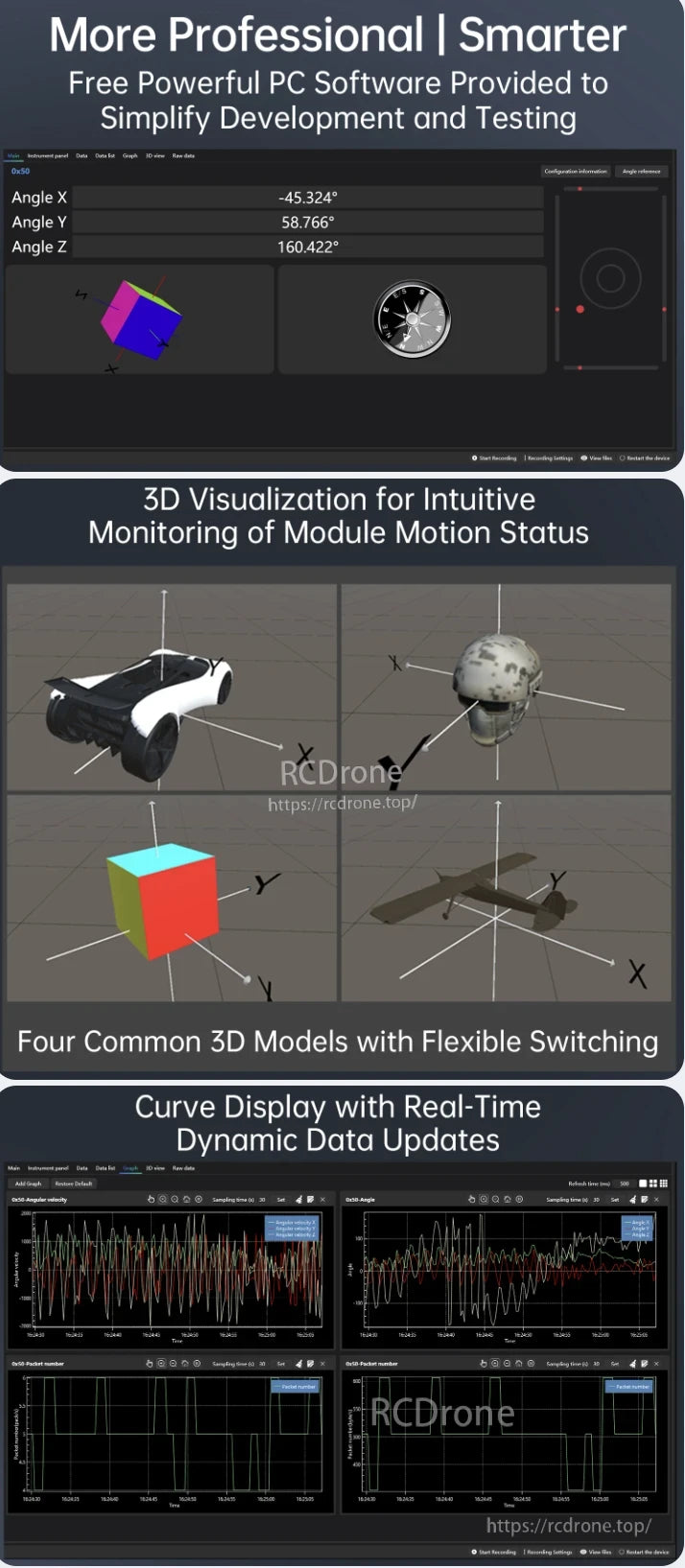
WitMotion HWT601 AGV IMU için profesyonel PC yazılımı, gerçek zamanlı 3D görselleştirme, açı izleme ve dinamik eğri gösterimi sunar.Özellikler arasında sezgisel hareket izleme, esnek model değiştirme ve verimli geliştirme ve test için canlı veri güncellemeleri bulunmaktadır.
Destekleyici belgeler, geliştiricilerin ürünün uygulanmasına yardımcı olmak için STM32, Arduino, 51 UART, Windows C++ ve Matlab için örnek programlar içermektedir.
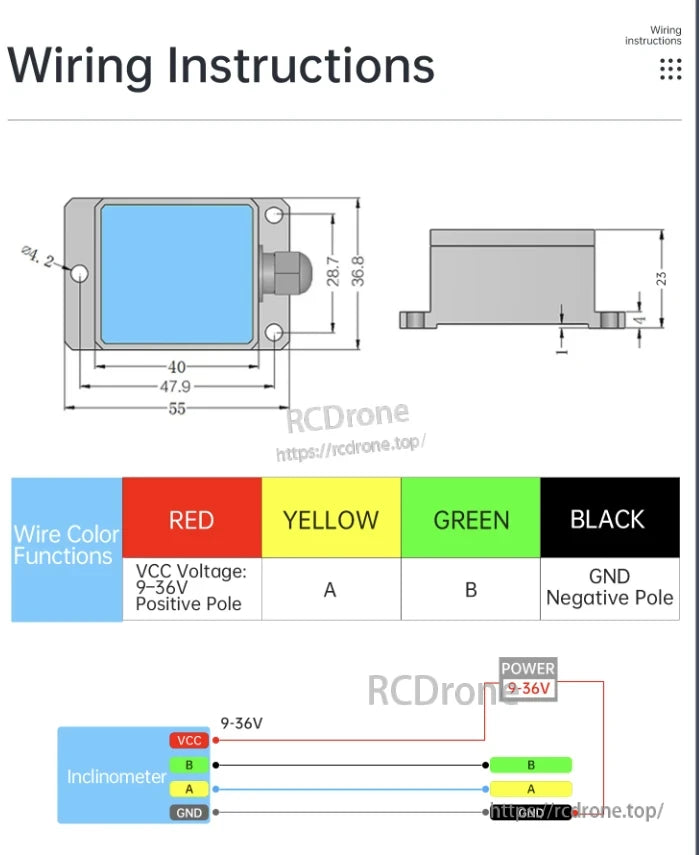
WitMotion HWT601 AGV IMU kablolama kılavuzu: kırmızı (9-36V), sarı (A), yeşil (B), siyah (GND). Boyutlar ve bağlantı diyagramı sağlanmıştır.

WitMotion HWT601 AGV IMU, dronlar, otonom sürüş, mobil robotlar ve insansız lojistik araçları için tasarlanmıştır.
Related Collections








