









WitMotion WT901C 9-Eksen AHRS IMU — İvmeölçer, Jiroskop, Manyetometre, Açı & Quaternion, 0.05° Hassasiyet, 0.2–200 Hz, TTL/RS232/RS485 Modbus
WitMotion WT901C 9-Eksen AHRS IMU — İvmeölçer, Jiroskop, Manyetometre, Açı & Quaternion, 0.05° Hassasiyet, 0.2–200 Hz, TTL/RS232/RS485 Modbus
WitMotion
Teslim alım stok durumu yüklenemedi
Genel Bakış
WitMotion WT901C, 3 eksenli ivmeölçer, 3 eksenli jiroskop ve 3 eksenli manyetometreyi WitMotion’un füzyon/Kalman filtreleme ile birleştiren kompakt bir 9 eksenli AHRS IMU'dur. Açılar (roll/pitch/yaw), açısal hız, ivme, manyetik alan ve quaternion çıktısı verir. 0.05° statik XY hassasiyeti (0.1° dinamik) sunar, 0.2–200 Hz güncelleme hızlarını destekler ve TTL, RS232 veya RS485 (Modbus) üzerinden iletişim kurar—otomasyon, düzleme getirme platformları, VR/AR ve endüstriyel testlerde eğim, titreşim ve tutum ölçümü için idealdir.
Ana özellikler
-
Yüksek hassasiyetli AHRS: XY statik 0.05°, dinamik 0.1°; sağ el kartesyen eksenleri.
-
Geniş I/O & voltaj: TTL 3.3–5 V, RS232/RS485 5–36 V, baud 4 800–230 400 (varsayılan 9 600).
-
Yapılandırılabilir çıkış: 0.2–200 Hz (varsayılan 10 Hz); kullanıcı tarafından seçilebilir içerikler.
-
Tam 9 eksenli veri: İvme, açısal hız, manyetik alan, açı & quaternion.
-
Görselleştirme araçları: Gerçek zamanlı grafikler ile Windows MiniIMU yazılımı, ham veri kaydı/ihraç (TXT), 3D hareket demosu, ve görsel manyetik kalibrasyon.
-
Geliştirici kaynakları: Sürücüler (CH340/CP2102), kılavuzlar/teknik veri sayfası, 51/C++/STM32/Arduino/Matlab için örnek kod, ve Android uygulaması.
-
Esnek kurulum: Dikey veya yatay montaj; kompakt 51 × 36 × 15 mm, ~20 g.
html
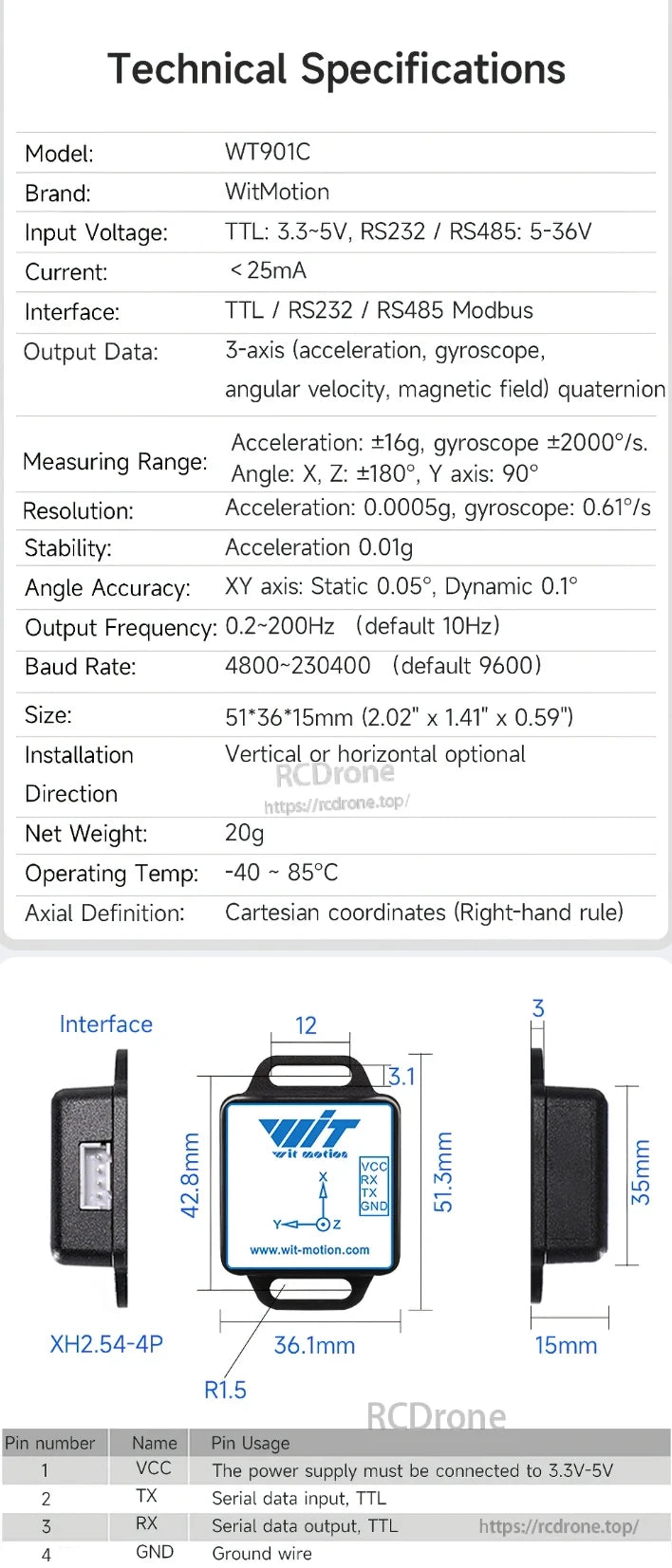
Teknik spesifikasyonlar
-
Model/Marka: WT901C / WitMotion
-
Arayüzler: TTL / RS232 / RS485 (Modbus)
-
Giriş voltajı: TTL: 3.3–5 V; RS232/RS485: 5–36 V
-
Akım: < 25 mA
-
Çıkış verisi: 3 eksenli ivme, jiroskop (açısal hız), manyetik alan, açı, quaternion
-
Ölçüm aralığı: Acc ±16 g; Jiroskop ±2000 °/s; Açı X,Z ±180°, Y 90°
-
Çözünürlük: Acc 0.0005 g; Jiroskop 0.61 °/s
-
Stabilite: Acc 0. 01 g
-
Açı doğruluğu: XY statik 0.05°, dynamik 0.1°
-
Çıkış frekansı: 0.2–200 Hz (varsayılan 10 Hz)
-
Baud hızı: 4 800–230 400 (varsayılan 9 600)
-
Boyut / Ağırlık: 51 × 36 × 15 mm / ≈ 20 g
-
Çalışma sıcaklığı: −40 ~ 85 °C
-
Ekseni tanımı: Kartezyen koordinatlar, sağ el kuralı
Boyutlar &ve konektör (TTL versiyonu)
-
Gövde: 51.3 mm (Y) × 36.1 mm (G) × 15 mm (D); montaj kulakları yarıçapı R1.5
-
Konektör: XH2.54-4P
-
Pinout (etikette soldan→sağa VCC/RX/TX/GND):
-
VCC — güç 3.3–5 V
-
TX — Seri veri girişi, TTL
-
RX — Seri veri çıkışı, TTL
-
GND — toprak
-
Not: Eksen grafiği, hizalamaya yardımcı olmak için konut üzerine basılmıştır (X↑, Y→, Z•).
Açı çıkış protokolü (çerçeve 0x55 0x53)
| Bayt | İçerik | Anlamı |
|---|---|---|
| 0 | 0x55 | Başlık |
| 1 | 0x53 | Açı çerçeve ID |
| 2–3 | RollL/RollH | X ekseni açısı |
| 4–5 | PitchL/PitchH | Y ekseni açısı |
| 6–7 | YawL/YawH | Z ekseni açısı |
| 8–9 | VL/VH | Firmware sürümü (düşük/yüksek) |
| 10 | Toplam | Kontrol toplamı |
Açı dönüşümü:Roll = ((RollH<<8)|RollL)/32768*180°Pitch = ((PitchH<<8)|PitchL)/32768*180°Yaw = ((YawH<<8)|YawL)/32768*180°
(İvme ve açısal hız çerçeveleri benzerdir; kılavuza bakın.)
Yazılım &ve araçlar
-
Windows (MiniIMU.exe): cihaz yapılandırması (aralıklar, bant genişliği, çıkış hızı), gerçek zamanlı grafikler, ham veri görünümü, 3D poz görselleştirmesi, TXT'ye aktarma.
-
Manyetik kalibrasyon: yanlılığı azaltmak için görsel elips uyumlu iş akışı (X/Y/Z etrafında döndürme).
-
MCU entegrasyonu: doğrudan seri bağlantı; TTL önerilir basit MCU bağlantısı için (Arduino/STM32, vb.).
-
Kaynaklar dahil: Datasheet.pdf, Manual.pdf, CH340 &ve CP2102 sürücüleri, örnek kod, Android Uygulaması, demo videolar.
Tipik uygulamalar
Otomasyon | Eğim/seviye izleme | Titreşim izleme | Düzleme platformları | IoT sistem entegrasyonu | Endüstriyel test | VR/AR başlıkları | Tüketici elektroniği.
Detaylar

0.05° doğrulukla X ve Y eksenlerinde maliyet etkin AHRS IMU. WitMotion Fusion Algoritması kullanarak eğim, titreşim ve tutum algılama özelliklerine sahiptir. ivme, jiroskop, açı, manyetik, Kalman filtreleme ve quaternion fonksiyonlarını içerir.
WitMotion WT901C IMU, ivme, jiroskop ve manyetometre ile 3 eksenli algılama sunar. Quaternion çıktısı sağlar. TTL, RS232, RS485 destekler. ±16g, ±2000°/s, ±180° açıları ölçer. Kompakt 51×36×15mm boyut. -40 ile 85°C arasında çalışır.

WitMotion WT901C IMU, otomasyon, VR başlıkları, düzleme getirme ve titreşim izleme destekler. Tüketici elektroniği, IoT, endüstriyel test ve AR/VR için çalışır. Gerçek zamanlı açı verisi görüntüleme için ücretsiz yazılım ile birlikte gelir.

WitMotion WT901C IMU yapılandırma menüsü, sensör kalibrasyonu, veri çıkış ayarları ve gerçek zamanlı hareket görselleştirmesi sağlar. 9 eksenli algoritmayı destekler, ayarlanabilir ivme, jiroskop, bant genişliği ve GPS saat dilimi sunar. Gerçek zamanlı grafikler, hassas ölçüm için ivme ve açısal hızı gösterir.
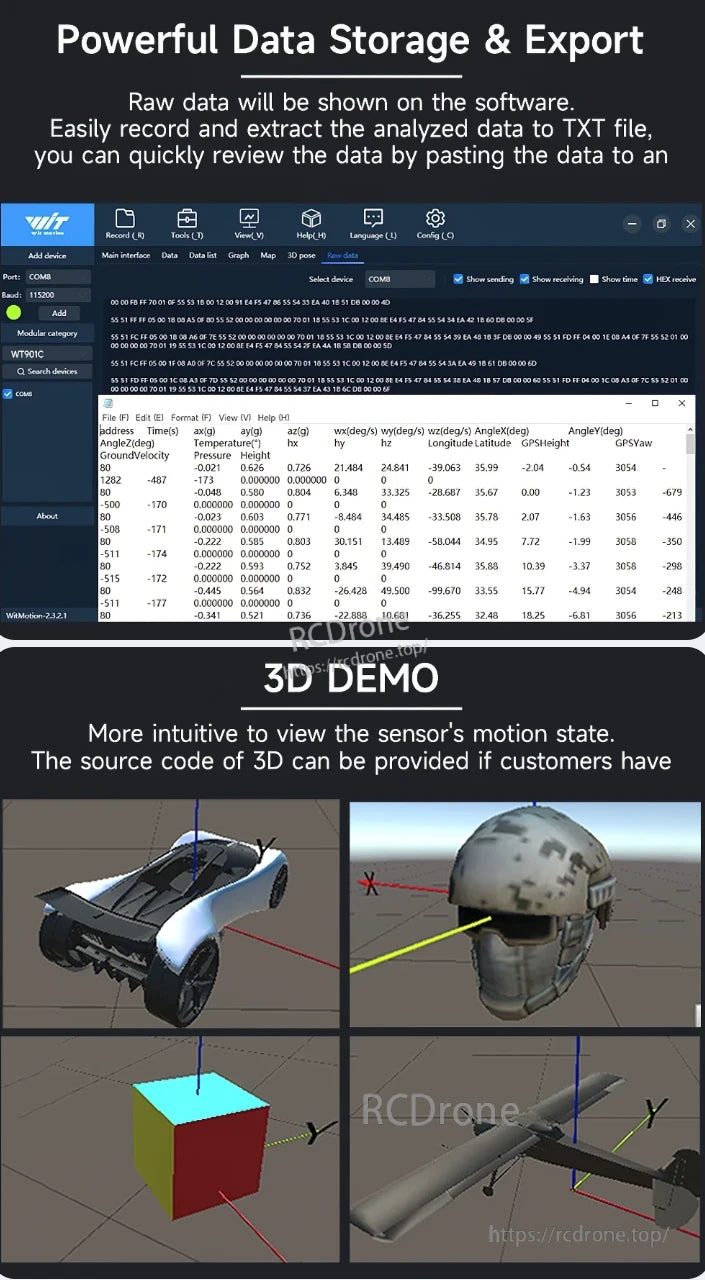
WitMotion WT901C IMU, güçlü veri depolama, kolay TXT dışa aktarma ve mevcut kaynak kodu ile 3D hareket görselleştirmesi sunar.
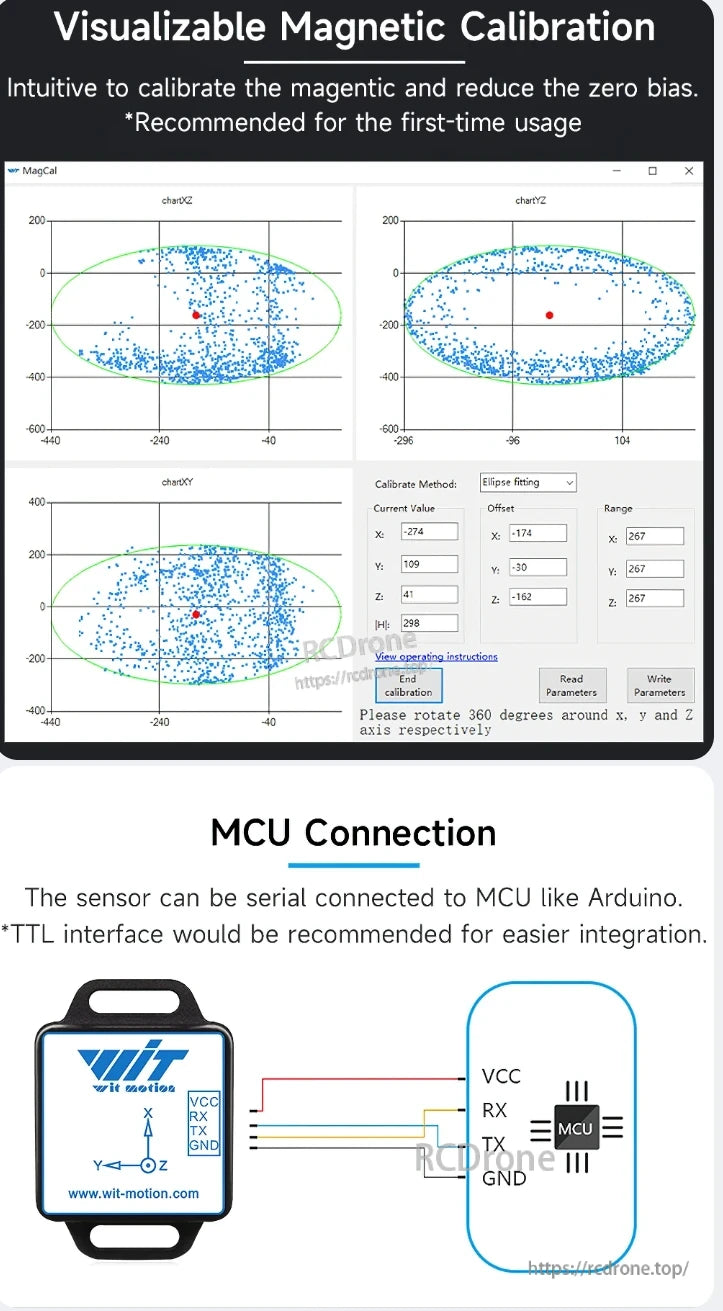
WT901C IMU için elips uyum yöntemi ile görselleştirilebilir manyetik kalibrasyon. TTL arayüzü üzerinden MCU bağlantısı önerilir. Sensör, VCC, RX, TX, GND pinlerini kullanarak Arduino benzeri MCU'lara bağlanır.
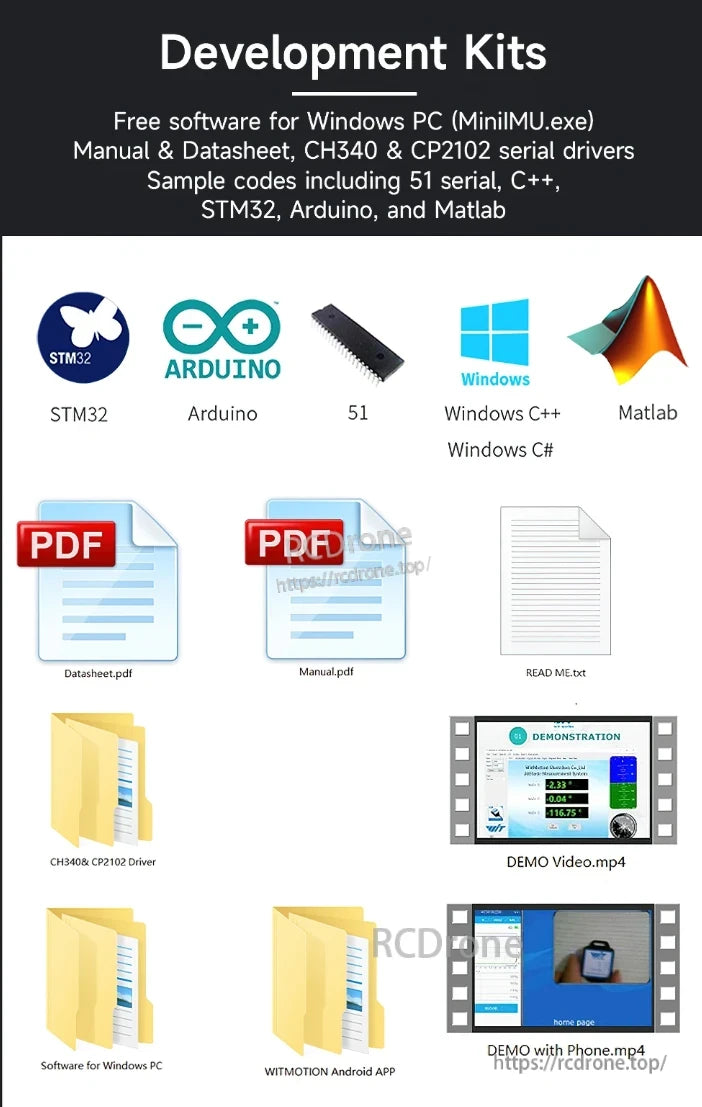
Geliştirme Kitleri, Windows için ücretsiz yazılım, kılavuz, veri sayfası, CH340 & CP2102 sürücüleri, 51, C++, STM32, Arduino ve Matlab için örnek kodlar ile birlikte demo videoları ve Android uygulaması içerir.
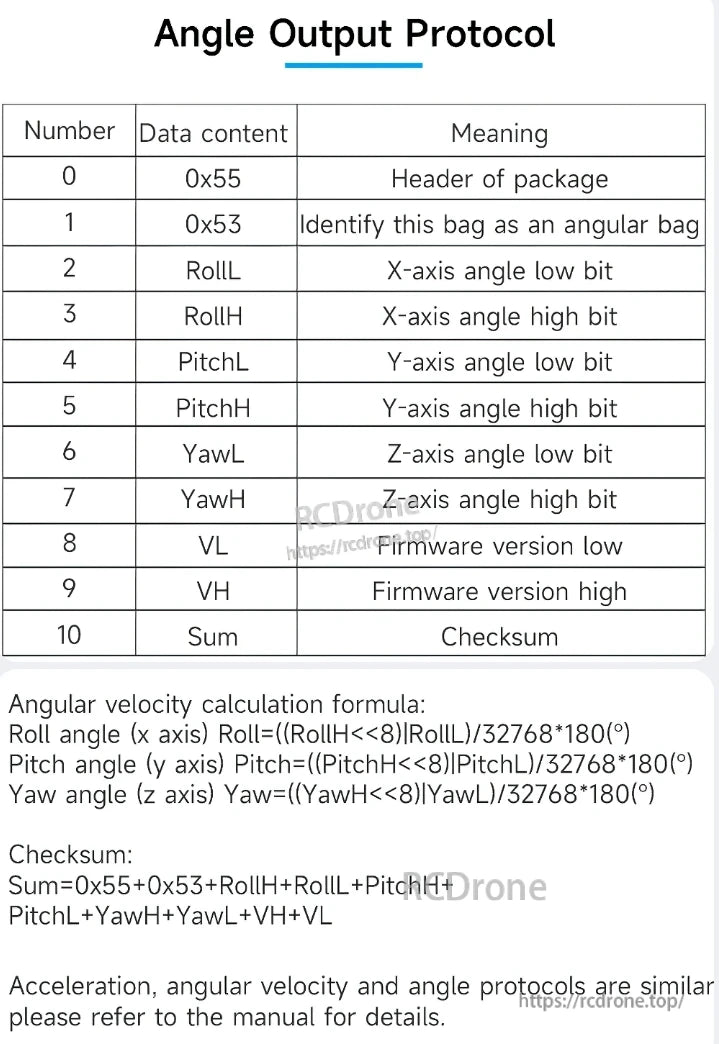
WT901C IMU açı çıkışı için veri yapısı, başlık, roll, pitch, yaw, yazılım sürümü ve kontrol toplamını içerir. Hesaplamalar ve doğrulama için formüller sağlanmıştır. İvme ve açısal hız için benzer yapılar mevcuttur.
Related Collections









