








WitMotion WTRTK-M ZED-F9P RTK GNSS GPS Modülü, UAV/Araba için Santimetre Düzeyinde Diferansiyel Konumlama, GPS/GLONASS/Galileo/BeiDou, UART TTL, NMEA/UBX/RTCM
WitMotion WTRTK-M ZED-F9P RTK GNSS GPS Modülü, UAV/Araba için Santimetre Düzeyinde Diferansiyel Konumlama, GPS/GLONASS/Galileo/BeiDou, UART TTL, NMEA/UBX/RTCM
WitMotion
Teslim alım stok durumu yüklenemedi
Genel Bakış
WTRTK-M, RTK diferansiyel konumlandırma modülü, u-blox ZED-F9P GNSS motoru üzerine inşa edilmiştir. Aynı anda GPS, GLONASS, Galileo, BeiDou ve QZSS izler ve RTK düzeltmesi sonrası santimetre seviyesinde doğruluk sağlar. Modül, çift frekanslı alım, 5 Hz gerçek zamanlı çıktı sunar ve mobil/temel istasyonların tek tuşla yapılandırılması ve rota görselleştirmesi için bir PC aracı sağlar. Anti-parazit ve kalibrasyon teknolojileri, veri istikrarını ve güvenliğini artırır.
Ana Özellikler
-
Santimetre seviyesinde RTK: hızlı yakınsama ile mobil/temel iş akışı.
-
Çoklu takımyıldızı, çift frekanslı: GPS L1/L2; GLONASS G1/G2; BeiDou B1/B2; Galileo E1/E5b; QZSS L1/L2.
-
Yüksek hassasiyet &ve hızlı başlatma: 184 kanal; soğuk başlatma 24 s, sıcak başlatma 2 s, yeniden yakalama 2 s; yakınsama ≤10 s.
-
Zaman/yön performansı: 1PPS RMS 30 ns (99% 60 ns); yön doğruluğu 0.4° (dinamik 0.3°).
-
Zengin protokoller: NMEA, UBX, RTCM 3.3; taşıyıcı fazı (RAWX) desteklenmektedir.
-
Yapılandırılabilir hız &ve 1 PPS: 0.25–20 Hz güncelleme (varsayılan 1 Hz); ikinci darbe 0.25 Hz–10 MHz (varsayılan periyot 1 s, yüksek seviye ~100 ns).
-
Çift UART (TTL) ve SMA-K / IPEX anten seçenekleri; izleri görüntülemek ve cihaz ayarlarını yapmak için PC yazılımı.
-
Uygulama sahneleri: İHA anketleme/haritalama, otonom traktörler/AGV, yüksek hassasiyetli araç navigasyonu, robotik.
RTK Nasıl Çalışır (kısa)
Bir sabit baz istasyonu, uydu ölçüm hatasını bilinen konumuna göre hesaplar ve RTCM diferansiyel verilerini yayınlar. Mobil istasyon bu düzeltmeleri uygulayarak gerçek zamanlı, santimetre seviyesinde konumlama sağlar.
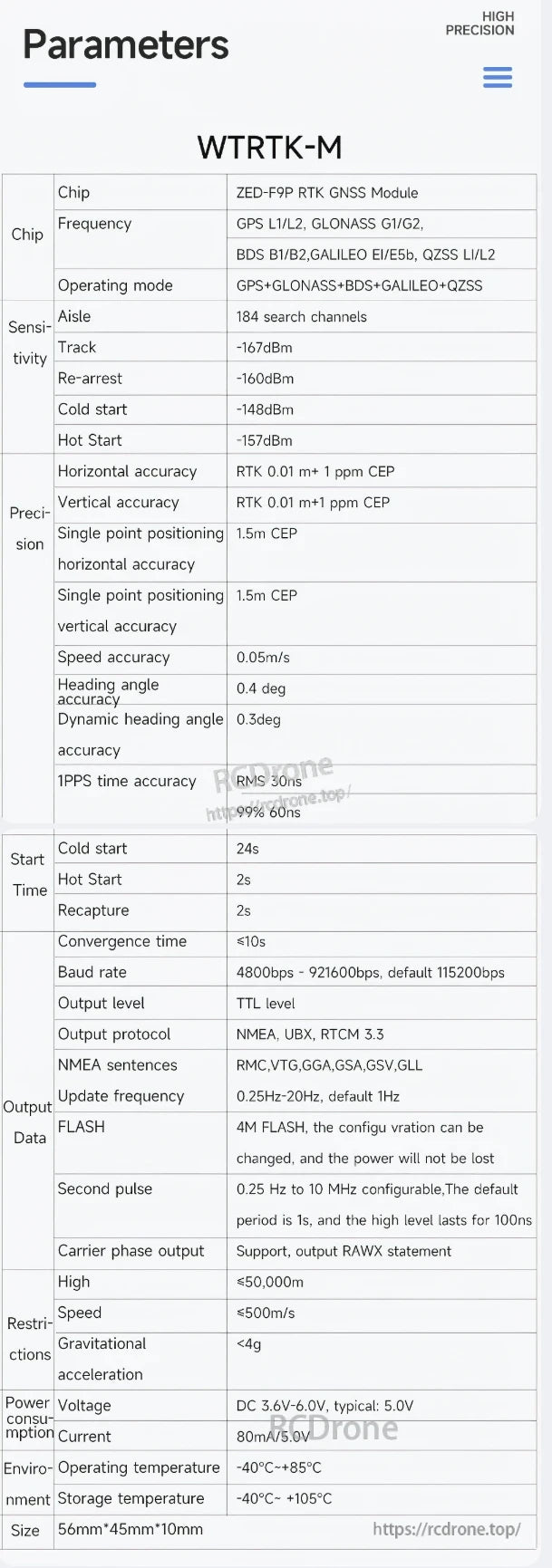
Temel Özellikler
| Ürün | Özellik |
|---|---|
| GNSS çipi | ZED-F9P RTK GNSS Modülü |
| Takım/Yaylar | GPS L1/L2, GLONASS G1/G2, BeiDou B1/B2, Galileo E1/E5b, QZSS L1/L2 |
| Kanal Sayısı | 184 arama kanalı |
| Duyarlılık | Takip -167 dBm; yeniden kazanım -160 dBm; soğuk başlatma -148 dBm; sıcak başlatma -157 dBm |
| RTK doğruluğu (CEP) | Yatay/Dikey: 0.01 m + 1 ppm CEP |
| Tek nokta doğruluğu (CEP) | Yatay 1.5 m, Dikey 1.5 m |
| Hız doğruluğu | 0.05 m/s |
| Yön doğruluğu | 0.4° (dinamik 0.3°) |
| 1PPS zaman doğruluğu | RMS 30 ns, %99 60 ns |
| Başlat/Yeniden Yakala | Soğuk 24 s, Sıcak 2 s, Yeniden Yakala 2 s; Yakınsama ≤10 s |
| Baud hızı | 4 800–921 600 bps (varsayılan 115 200 bps) |
| Elektrik seviyesi | TTL |
| Protokoller | NMEA, UBX, RTCM 3.3; NMEA cümleleri: RMC/VTG/GGA/GSA/GSV/GLL |
| Güncelleme hızı | 0.25–20 Hz (varsayılan 1 Hz); not: çok yüksek oranlar seri yükü artırır—güvenilirlik için ≤ 5 Hz tutun |
| Yerleşik flaş | 4 MB, güç kapandığında yapılandırmayı korur |
| Taşıyıcı faz | RAWX çıkışı desteklenmektedir |
| Sınırlamalar | Yükseklik ≤ 50 000 m; Hız ≤ 500 m/s; İvme < 4 g |
| Besleme | DC 3.6–6.0 V (tipik 5.0 V), ≈ 80 mA @ 5 V |
| Çalışma / Depolama | -40 °C ile +85 °C / -40 °C ile +105 °C |
| Boyutlar | 56 × 45 × 10 mm (ön diyagram işaretleri ~46 mm yükseklik) |
Arayüzler &ve Göstergeler
Anten: SMA-K (IPEX seçeneği ile).
UART portları (TTL, her biri 4 pin):
-
P1 (sağ) – VI (3.6–6.0 V, 5 V geri), G (GND), T1 (TX), R1 (RX).
-
P2 (sol) – VO (3.6–6.0 V, 5 V geri), G (GND), T2 (TX), R2 (RX).
P2, RTCM veri girişi/çıkışı için kullanılır; P1, NMEA verilerini çıkartır. P1/P2 VCC'leri dahili olarak bağlıdır—herhangi birinden güç alabilirsiniz.
LED'ler
-
PWR: Kırmızı AÇIK = güç uygulanıyor.
-
TX1/TX2: Yeşil yanıp sönüyor = portta veri çıkışı var.
-
PPS: Fix öncesi kapalı; mavi yanıp sönüyor 3D konumlandırma sonrası.
-
RTK: RTK'de değilken kapalı; mavi yanıp sönüyor RTK Float durumunda; RTK Fixed durumunda açık..
Bağlantı & Yazılım
-
Kablolu kurulum: antenayı SMA'ya bağlayın; UART1 ile PC'ye bağlanarak konum verilerini görüntüleyin.
-
Temel/Mobil: bir modülü temel olarak ayarlayın (RTC'yi çıkış verir); mobil RTC'yi tüketerek RTK'yı gerçekleştirir—mobil, düzeltmeleri aldıktan sonra doğrudan bir RTK rover olarak kullanılabilir.
-
PC yazılımı: izleme görselleştirmesi, veri görünümü ve tek tuşla temel/rover yapılandırması.
Notlar
-
Varsayılan baud 115 200 bps'dir. Çıkış frekansını artırırsanız, taşma olmaması için baud'u buna göre artırın (pratik üst oran ≤ 5 Hz standart bağlantılarda).
-
Özel geliştirme desteklenmektedir.
Ayrıntılar
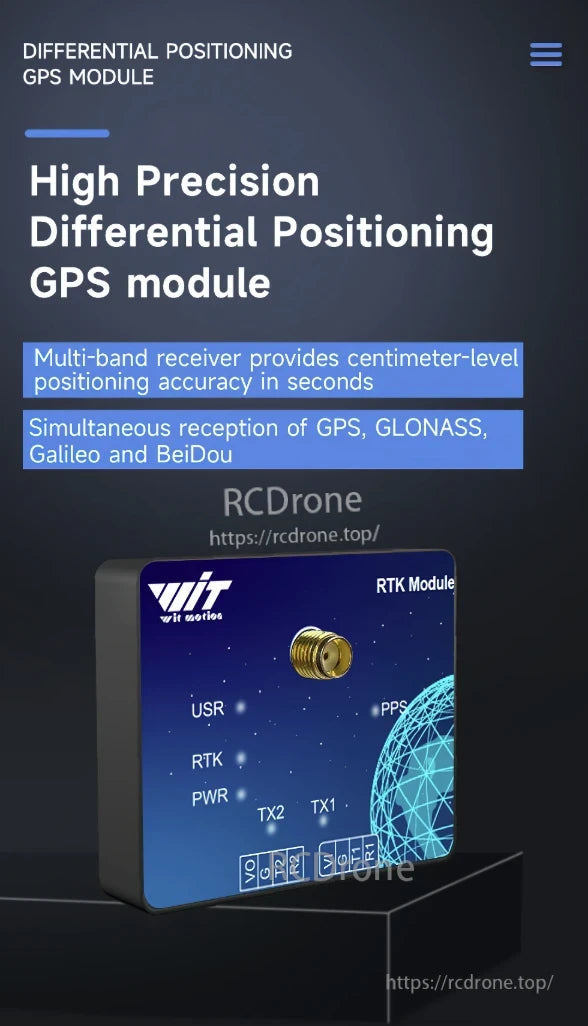
Santimetre seviyesinde hassasiyete sahip yüksek hassasiyetli diferansiyel konumlandırma GPS modülü. GPS, GLONASS, Galileo, BeiDou'yu destekler.Çok bantlı alıcı, RTK teknolojisi, PPS, TX1, TX2, USR, RTK, PWR göstergeleri.
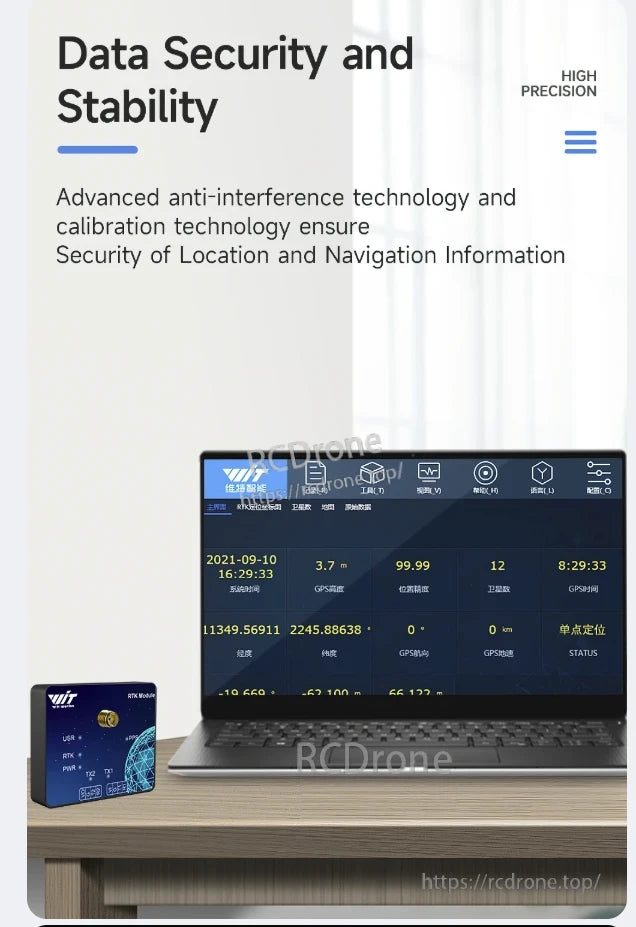
WitMotion WTRTK-M ZED-F9P RTK GNSS GPS, güvenilir konum ve navigasyon bilgileri için gelişmiş parazit önleme ve kalibrasyon teknolojisi ile yüksek hassasiyetli veri güvenliği ve istikrar sağlar.
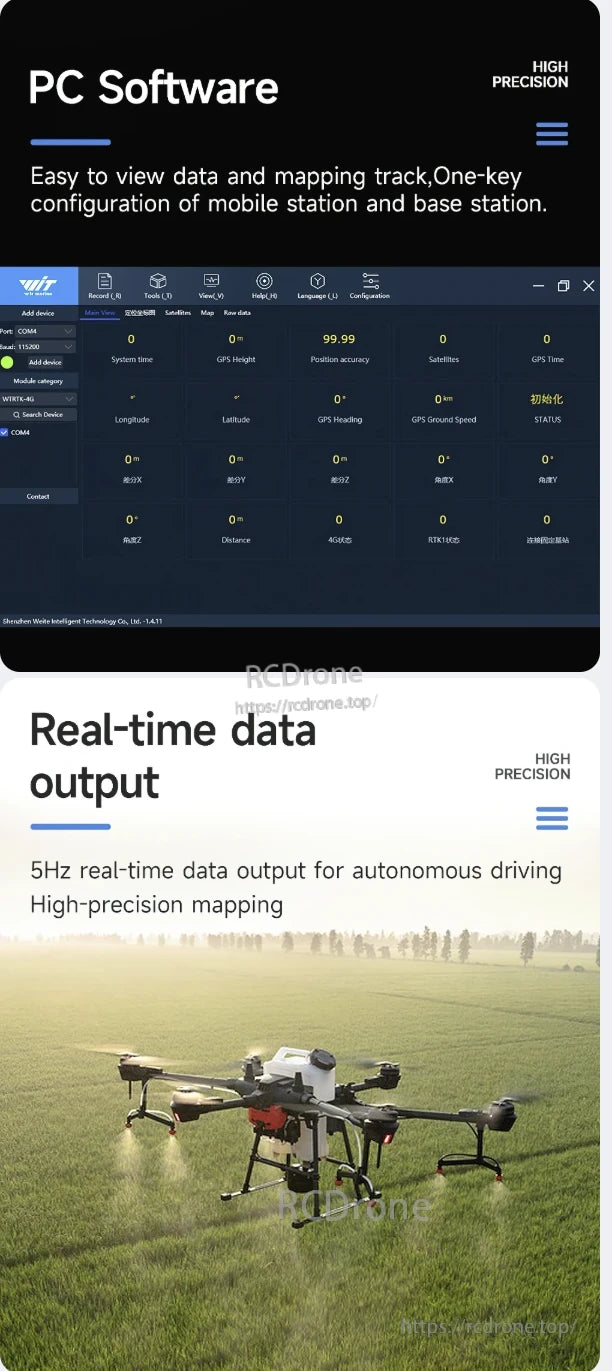
Otonom sürüş ve haritalama için 5Hz gerçek zamanlı veri çıkışına sahip yüksek hassasiyetli RTK GNSS GPS yazılımı. Tek tuşla kurulum, uydu takibi, doğru konumlandırma ve detaylı telemetriyi destekler.
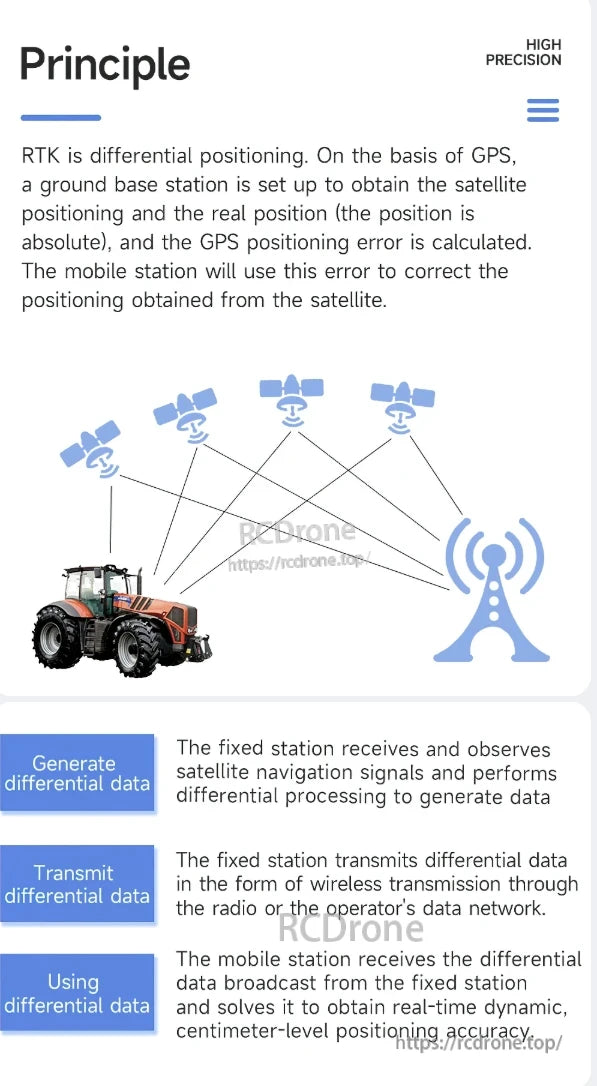
RTK, GPS ile diferansiyel konumlandırma kullanır. Sabit bir istasyon, uydu konumlandırma hatalarını hesaplar ve düzeltmeleri kablosuz olarak bir mobil istasyona ileterek hassas navigasyon için santimetre seviyesinde gerçek zamanlı doğruluk sağlar.
WTRTK-M, çoklu takımyıldızı desteği, yüksek hassasiyet (0.01m), hızlı başlama süreleri, birden fazla protokol ve -40°C ile +85°C arasında çalışır.


WitMotion RTK modülü için kablolu bağlantı diyagramı: baz/mobil istasyon kurulumları, SMA antenler, UART1 PC bağlantıları. Yazılım, kılavuz, video ve protokol kaynaklarını içerir.
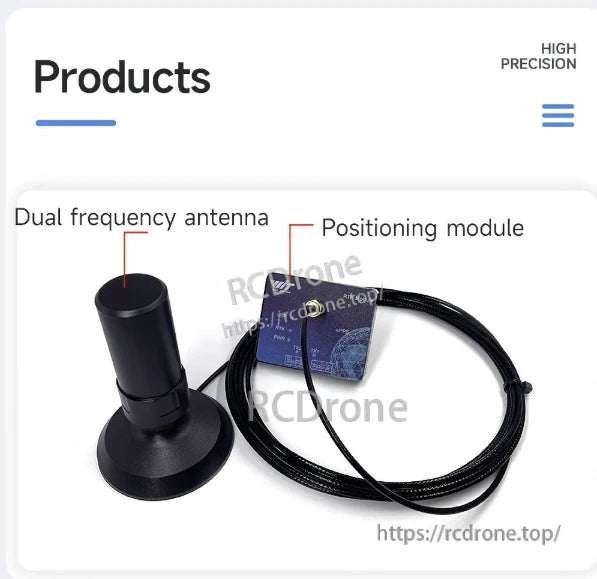
Yüksek hassasiyetli GNSS GPS için çift frekanslı anten ve konumlandırma modülü
Related Collections








