








Yahboom Muto S2 18DOF AI Görüşlü Hexapod Robot, Raspberry Pi 5 & Jetson NANO için, 2DOF PTZ FPV
Yahboom Muto S2 18DOF AI Görüşlü Hexapod Robot, Raspberry Pi 5 & Jetson NANO için, 2DOF PTZ FPV
Yahboom
Teslim alım stok durumu yüklenemedi
Genel Bakış
Yahboom Muto S2, ana kontrolcü olarak Raspberry Pi 5 veya NVIDIA Jetson NANO için tasarlanmış bir 18DOF hexapod robottur. Alüminyum alaşımlı gövdeye sahip, masaüstü seviyesinde biyomimetik bir hexapod robot olup, 18 serbestlik derecesi ve simüle edilmiş yürüyüşler için yerleşik ters kinematik algoritma kontrolüne sahiptir. Python3 programlama ve OpenCV görüntü işleme ile renk tanıma, takip/izleme, yüz takibi, QR kod tanıma ve görsel hat devriyesi gibi AI görsel etkileşim fonksiyonlarını destekler. Kontrol yöntemleri arasında cep telefonu uygulaması, kablosuz kumanda kontrolü ve bilgisayar web sayfası (Jupyter Lab) kontrolü bulunur ve gerçek zamanlı video iletimi (FPV) sağlar.
Ana Özellikler
- AI Görsel Hexapod Robot: Ters Kinematik Algoritması, Biyomimetik Yürüyüş, 18DOF Eklem, AI Görsel Etkileşim.
- 18DOF hareket eklemleri: Her bacakta üç eklemi bağlamak için 18 yüksek performanslı servo ve alüminyum alaşımlı yapısal parçalar kullanır.
- 35KG akıllı seri veri yolu servo sistemi: 18PCS 35KG metal servolar.
- 2D kamera PTZ: Görsel uygulamalar için 2DOF kamera PTZ.
- Gerçek zamanlı video iletimi: HD video görüntülerini gerçek zamanlı olarak izlemek için mobil uygulama üzerinden yerel alan ağına bağlanın.
- Duruş & hareket ayarı : Yürüme hızının ve robot gövde yüksekliğinin serbestçe ayarlanmasını destekler (Robot Yüksekliği Ayarı / Robot Hızı Ayarı; yürüme hızı ayarı: yavaş/hızlı).
- Öğretim modu: Ana makinenin tek bacak hareketini manuel olarak kontrol edin; başka bir köle makine aynı hareketi gerçekleştirir.
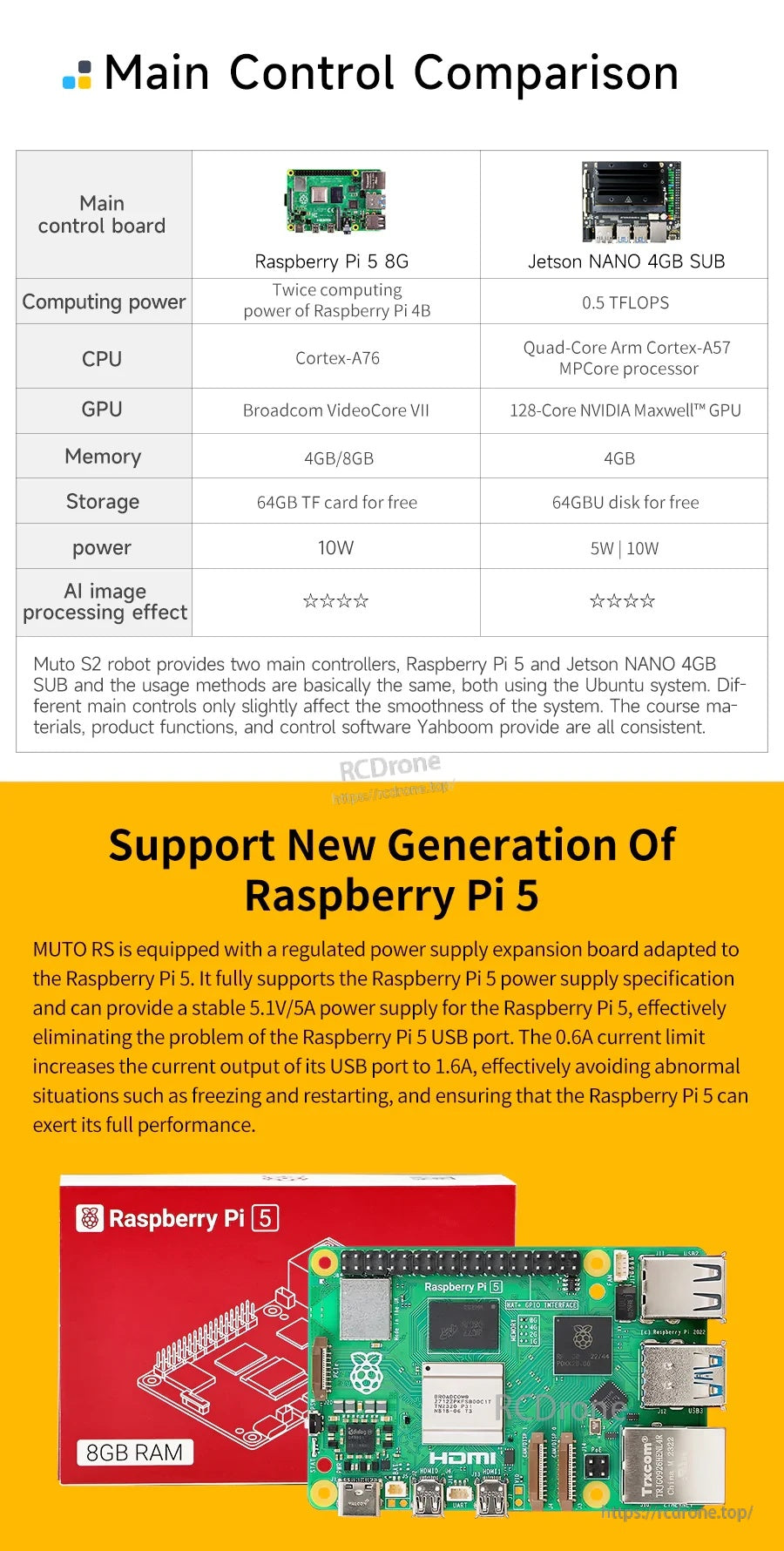
- Raspberry Pi 5 destek notu: “MUTO RS, Raspberry Pi 5'e uyarlanmış regüleli güç kaynağı genişleme kartı” ile donatılmıştır, 5.1V/5A sabit güç kaynağı sağlar; 0.6A akım limiti USB portu akım çıkışını 1'e artırır.6A (donmanın/yeniden başlatmanın önlenmesine yardımcı olmak için).
Seçim yardımı ve satış sonrası destek için https://rcdrone.top/ ile iletişime geçin veya [email protected].
adresine e-posta gönderin.
| Model | Muto S2 |
| Robot türü | AI Vision Hexapod Robot |
| Serbestlik dereceleri | 18DOF (18 serbestlik derecesi) |
| Gövde malzemesi | Alüminyum alaşım |
| Servolar | 18PCS 35KG metal servolar; 35KG akıllı seri veri yolu servo |
| Kamera | 2MP 1080 HD kamera; USB 1080P kamera |
| Kamera gimbalı | 2DOF kamera PTZ |
| Batarya | 7.4V 9900mAh batarya paketi (9900mAh) |
| Ana kontrolcü uyumluluğu | Raspberry Pi 5 / Jetson NANO |
| Programlama | Python3 |
| Görüş yığını | OpenCV görüntü işleme; AI görsel etkileşim; derin öğrenme |
| Uzaktan kumanda | Mobil Uygulama, kablosuz kumanda, bilgisayar web sayfası (Jupyter Lab); WiFi kontrolü |
Ana Kontrol Karşılaştırması (sağlandığı gibi)
| Ana kontrol kartı | Raspberry Pi 5 8G | Jetson NANO 4GB SUB |
| Hesaplama gücü | Raspberry Pi 4B'nin iki katı hesaplama gücü | 0.5 TFLOPS |
| CPU | Cortex-A76 | Dört Çekirdekli Arm Cortex-A57 MPCore işlemci |
| GPU | Broadcom VideoCore VII | 128 Çekirdekli NVIDIA Maxwell GPU |
| Hafıza | 4GB/8GB | 4GB |
| Depolama | Ücretsiz 64GB TF kartı | Ücretsiz 64GB U diski |
| Güç | 10W | 5W | 10W |
| AI görüntü işleme etkisi | ★★★★ | ★★★ |
Muto S2 robotu, iki ana kontrolcü sunar: Raspberry Pi 5 ve Jetson NANO 4GB SUB, ve kullanım yöntemleri temelde aynıdır, her ikisi de Ubuntu sistemini kullanır. Farklı ana kontroller sadece sistemin akıcılığını hafifçe etkiler.Kurs materyalleri, ürün fonksiyonları ve sağlanan kontrol yazılımı tutarlıdır.
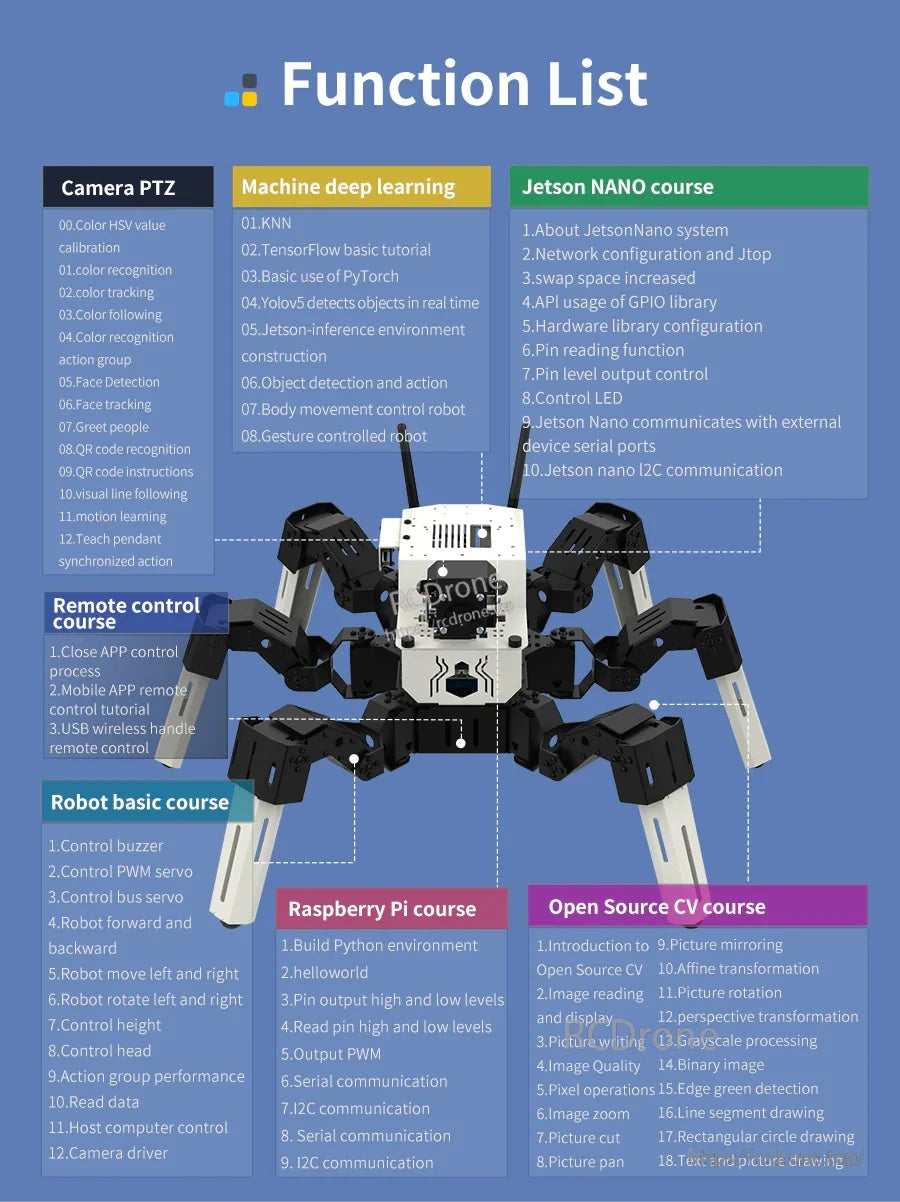
Fonksiyon Listesi (Kurslar/Örnekler)
Kamera PTZ
- 00. Renk HSV değeri kalibrasyonu
- 01. Renk tanıma
- 02. Renk takibi
- 03. Renk takip etme
- 04. Renk tanıma eylem grubu
- 05. Yüz Tanıma
- 06. Yüz takibi
- 07. İnsanları selamla
- 08. QR kod tanıma
- 09. QR kod talimatları
- 10. Görsel çizgi takibi
- 11. Hareket öğrenme
- 12. Öğretme kolu senkronize eylem
Makine derin öğrenme
- 01. KNN
- 02. TensorFlow temel eğitimi
- 03. PyTorch'un temel kullanımı
- 04. Yolov5 gerçek zamanlı nesne tespiti
- 05. Jetson-inference ortam kurulumu
- 06. Nesne tespiti ve eylem
- 07.Vücut hareketi kontrol robotu
- 08. Jest kontrollü robot
Jetson NANO kursu
- 1. JetsonNano sistemi hakkında
- 2. Ağ yapılandırması ve Jtop
- 3. Takas alanı artırıldı
- 4. GPIO kütüphanesinin API kullanımı
- 5. Donanım kütüphanesi yapılandırması
- 6. Pin okuma fonksiyonu
- 7. Pin seviye çıkış kontrolü
- 8. LED kontrolü
- 9. Jetson Nano harici cihaz seri portları ile iletişim kurar
- 10. Jetson nano I2C iletişimi
Uzaktan kontrol kursu
- 1. APP kontrol sürecini kapat
- 2. Mobil APP uzaktan kontrol eğitimi
- 3. USB kablosuz kumanda uzaktan kontrolü
Robot temel kursu
- 1. Buzzer kontrolü
- 2. PWM servo kontrolü
- 3. Bus servo kontrolü
- 4. Robot ileri ve geri hareketi
- 5.Robot sola ve sağa hareket eder
- 6. Robot sola ve sağa döner
- 7. Yüksekliği kontrol et
- 8. Kafayı kontrol et
- 9. Hareket grubu performansı
- 10. Verileri oku
- 11. Ana bilgisayar kontrolü
- 12. Kamera sürücüsü
Raspberry Pi kursu
- 1. Python ortamı oluşturma
- 2. Merhaba Dünya
- 3. Pin çıkışını yüksek ve düşük seviyelere ayarla
- 4. Pin yüksek ve düşük seviyelerini oku
- 5. PWM çıkışı
- 6. Seri iletişim
- 7. I2C iletişimi
- 8. Seri iletişim
- 9. I2C iletişimi
Açık Kaynak CV kursu
- 1. Açık Kaynak CV'ye Giriş
- 2. Görüntü okuma ve gösterme
- 3. Resim yazma
- 4. Görüntü Kalitesi
- 5. Piksel işlemleri
- 6. Görüntü yakınlaştırma
- 7. Resim kesme
- 8. Resim kaydırma
- 9. Resim yansıtma
- 10. Affin dönüşüm
- 11. Resim döndürme
- 12. Perspektif dönüşüm
- 13. Gri tonlama işlemi
- 14. İkili görüntü
- 15. Kenar yeşil algılama
- 16. Çizgi segmenti çizimi
- 17. Dikdörtgen daire çizimi
- 18. Metin ve resim çizimi
Video
Kılavuzlar / Eğitimler
Eğitim bağlantısı (resmi): http://www.yahboom.net/study/Muto-S2
Detaylar
18DOF biyonik hexapod platformu, ters kinematik yürüyüş kontrolünü kamera tabanlı AI etkileşimi ile birleştirir.

Raspberry Pi 5 veya NVIDIA Jetson Nano üzerinde çalışmak üzere inşa edilmiştir; robotik öğrenme, görüntü projeleri ve yürüyüş deneyleri için uygundur.

Ana yetenekler arasında OpenCV tabanlı görüntü işlevleri, Python programlama, WiFi kontrolü ve FPV video akışı bulunur.
Raspberry Pi 5 veya Jetson Nano'yu ana kontrolcü olarak seçin, Pi 5 stabilitesi için tasarlanmış bir güç genişletme kartı seçeneği ile.
Yapılandırılmış bir fonksiyon listesi ve öğrenme yolu, PTZ vizyonu, derin öğrenme temelleri ve her iki kontrolcü için adım adım kursları kapsar.
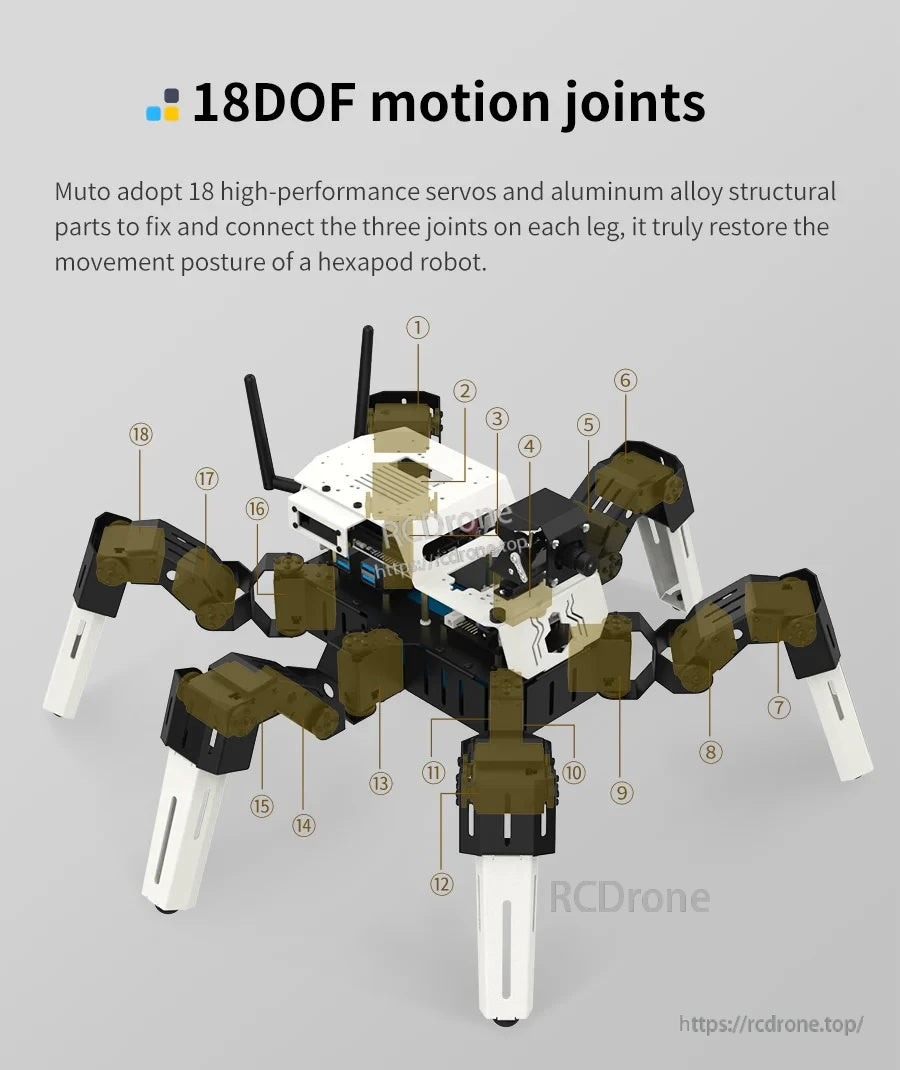
On sekiz yüksek torklu servo, her bacak için üç eklemi sürerek stabil, eklemli hexapod hareketi sağlar.
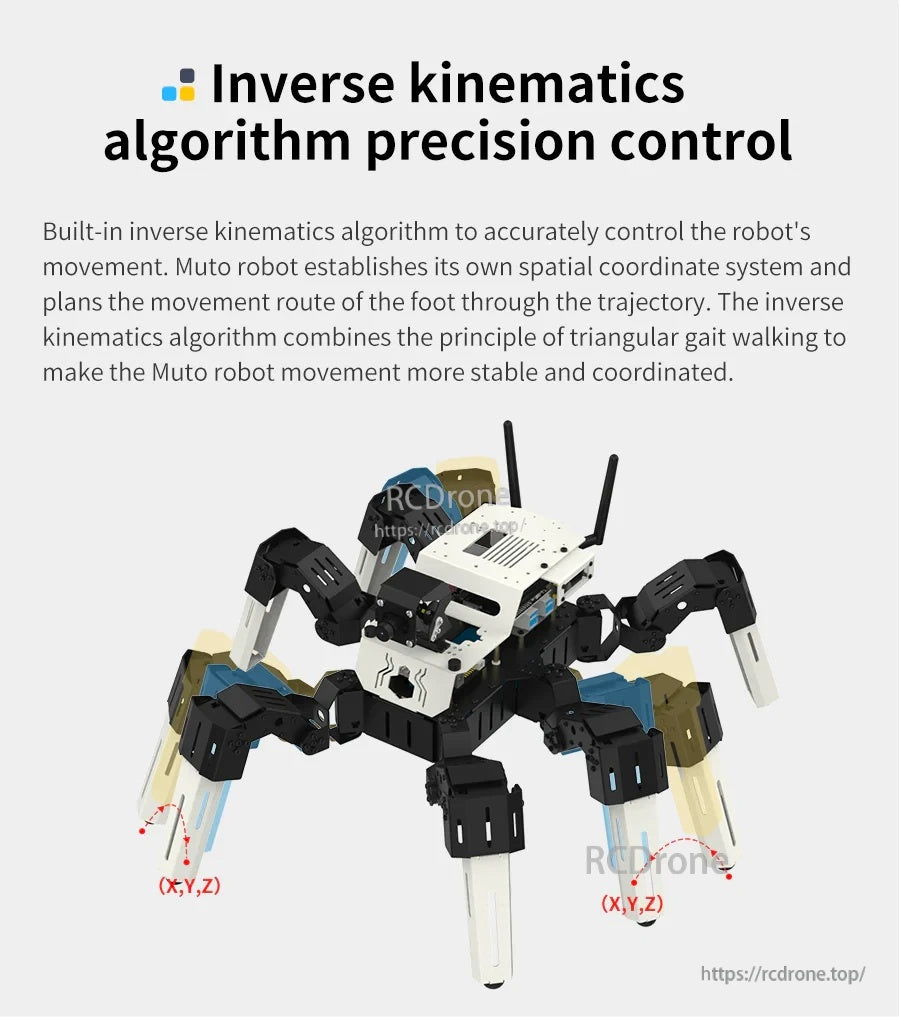
Yerleşik ters kinematik, daha pürüzsüz ve daha stabil simüle edilmiş yürüyüşler için ayak yörüngelerini koordine etmeye yardımcı olur.

Gerçek zamanlı FPV, yerel ağ bağlantısı üzerinden bir telefon uygulamasından robotu sürmenizi ve izlemenizi sağlar.

Uygulamada eylem gruplarını kaydedin, önceden ayarlanmış hareketleri tetikleyin veya özel pozlar için bireysel eklemleri ince ayarlayın.

Etkileşimli hareketler, jest tarzı selamlaşmalar ve hareket rutinleri gibi eğlenceli davranışları destekler.

Reaktif hareket demoları, yakın mesafedeki engeller sırasında denge ayarlamalarını ve dinamik hareketi vurgular.

Görüş tabanlı davranışlar, uygulamalı AI etkileşim deneyleri için izleme ve takip etmeyi destekleyebilir.

Hızlı komutlar, kıvrılma ve ileri hareket etme gibi yaygın eylem durumlarını etkinleştirir.
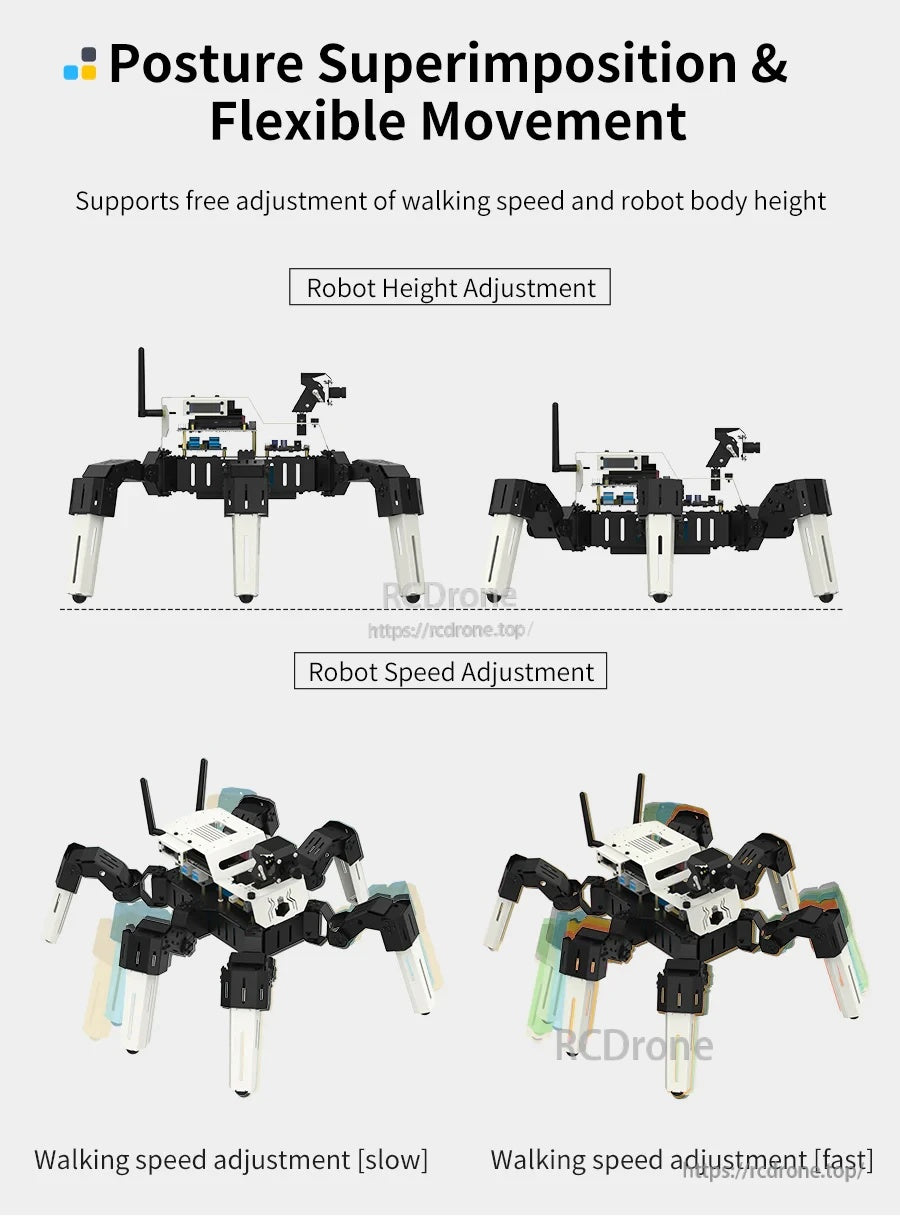
Farklı yüzeylere, demolar ve kapalı alan masaüstü testlerine uyacak şekilde vücut yüksekliğini ve yürüme hızını ayarlayın.

Öğretme modu, bir robotun bacak hareketinin manuel olarak yönlendirilmesine ve ikinci bir birim tarafından yansıtılmasına olanak tanır.

Kamera tabanlı AI özellikleri, OpenCV iş akışlarını kullanarak renk takibi, yüz takibi ve QR kod tanımayı içerir.

Obje tespiti, iskelet tabanlı duruş tahmini ve jest kontrol rutinleri gibi daha derin AI demolarını keşfedin.

Python'da program davranışlarını oluşturun ve hareket kontrolü, görüntü işleme ve otomasyon için bir dizüstü bilgisayardan hızlıca yineleyin.
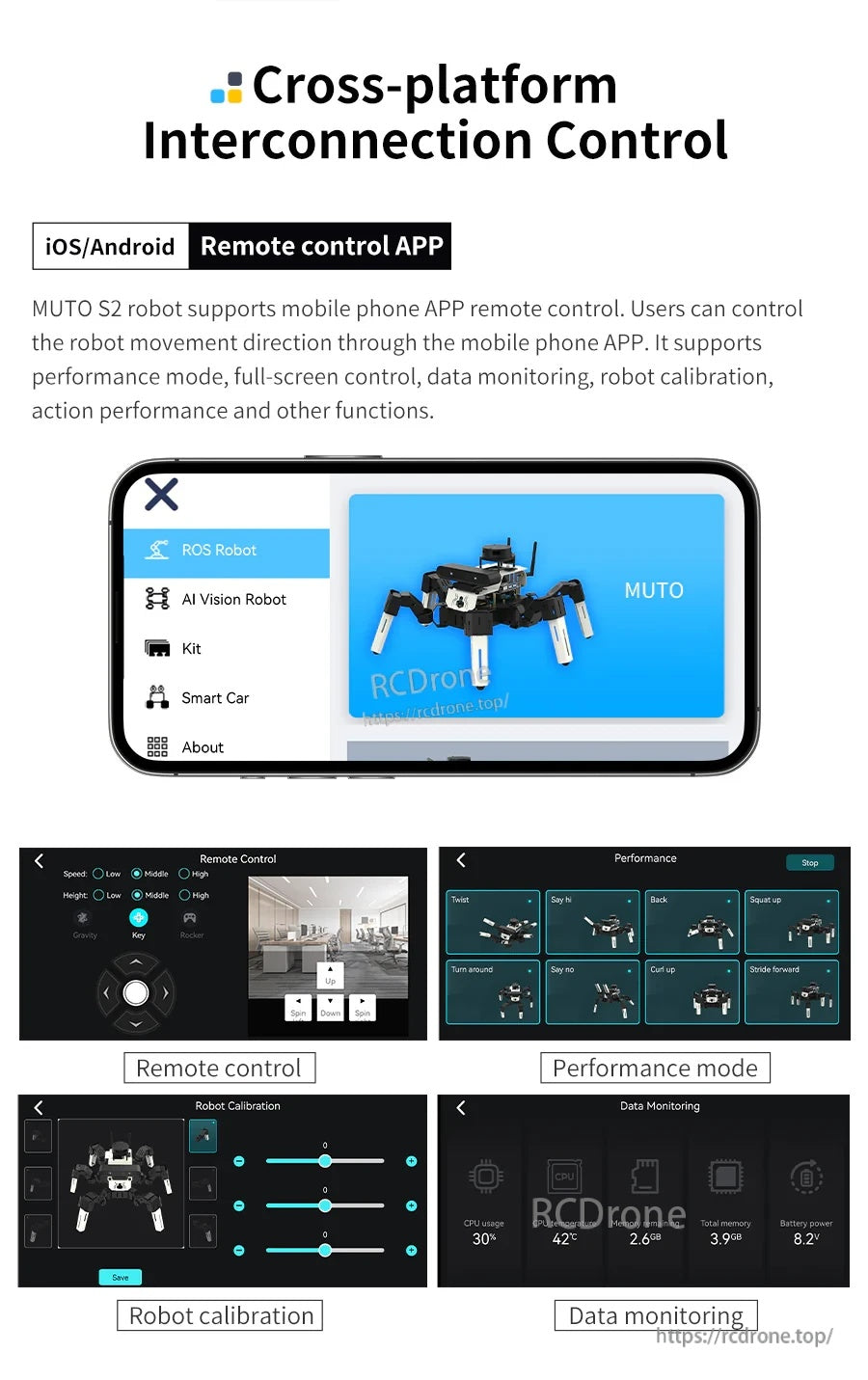
MUTO S2, uzaktan kontrol, robot kalibrasyonu, performans modları ve veri izleme için çapraz platform iOS/Android uygulamasını destekler.

Muto S2, robot hareketi için JupyterLab web sayfası ve 2.4G/USB kablosuz gamepad kontrolü aracılığıyla PC kontrolünü destekler.
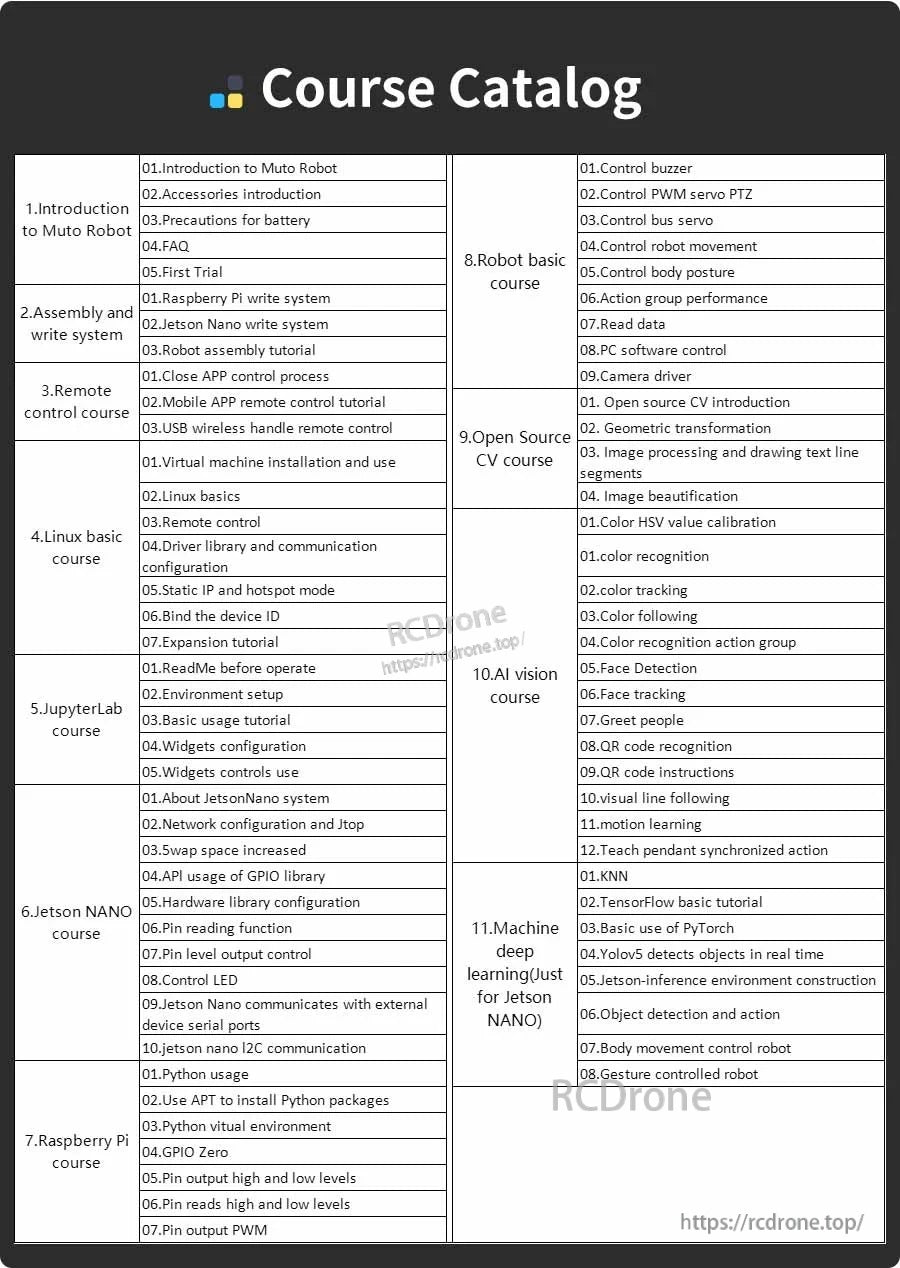
Yahboom Muto S2 kurs kataloğu, montaj, hareket kontrolü, OpenCV görüntü özellikleri ve AI deneyleri için rehberli modüller sunar.
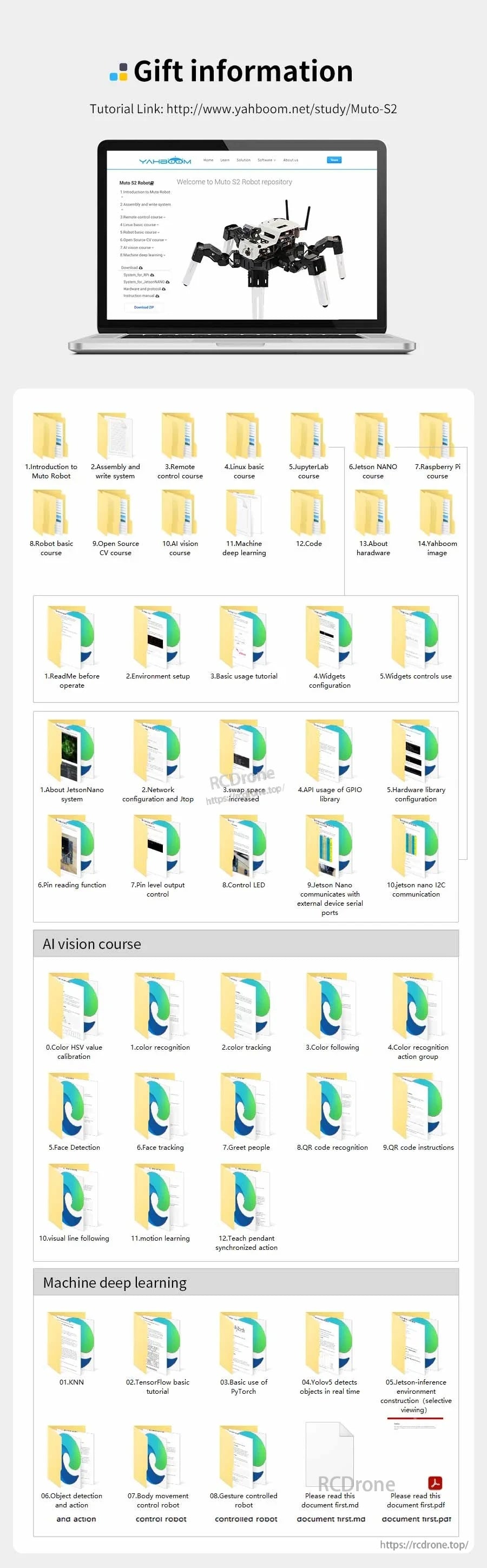
Yahboom Muto S2, adım adım kurulum ve kodlama için AI görüntü ve derin öğrenme kurs dosyalarıyla organize öğrenme kaynakları içerir.
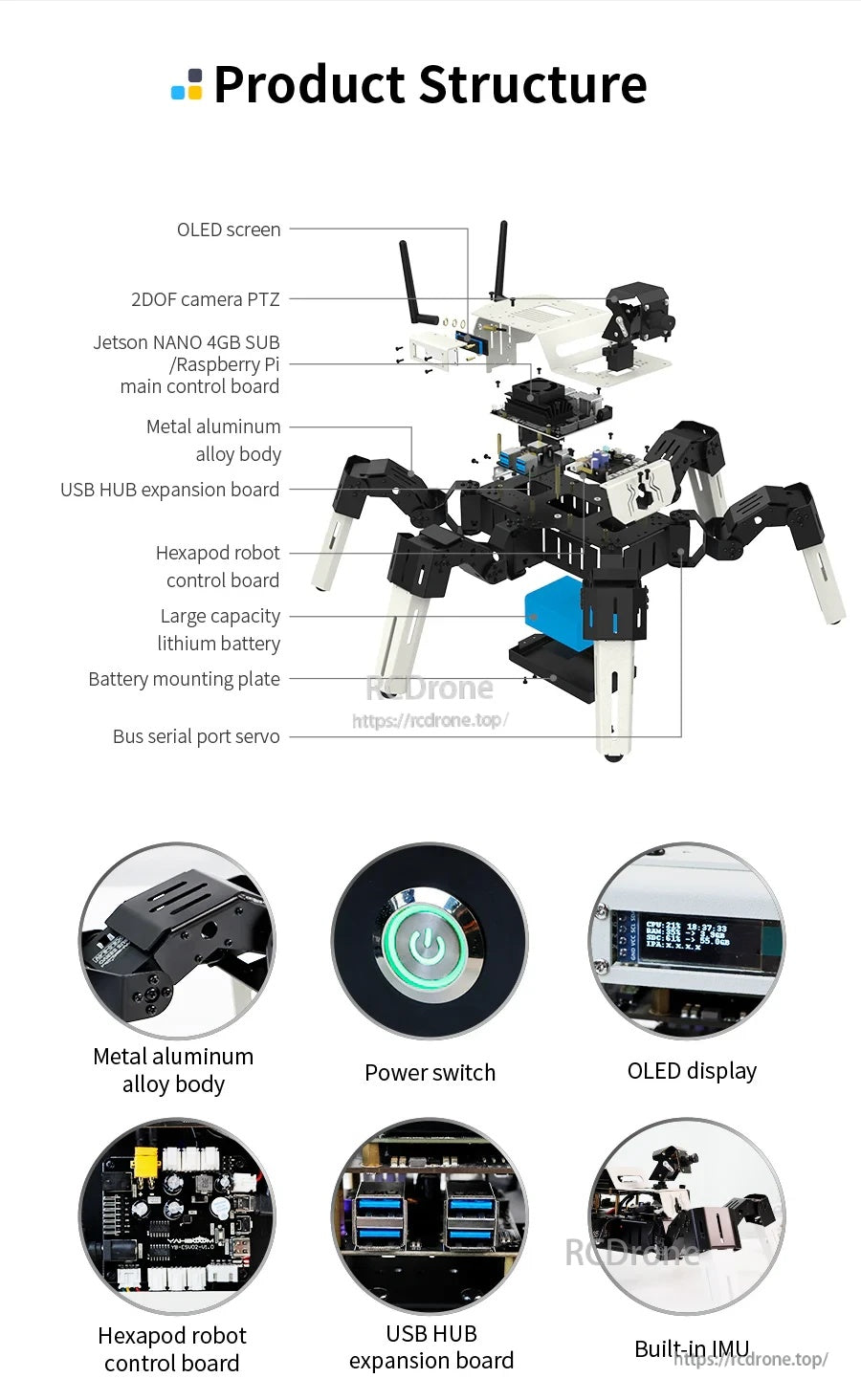
Muto S2 altı bacaklı düzeni, bir OLED ekran, 2DOF kamera PTZ modülü, USB hub genişletme kartı ve büyük bir lityum pil yuvası içerir.

Muto S2, 0–270° eklem aralığına sahip akıllı bir seri veri yolu servosu kullanır ve 35kgf·cm tork ve 6.0–8.4V çalışma dahil olmak üzere listelenen özelliklere sahiptir.
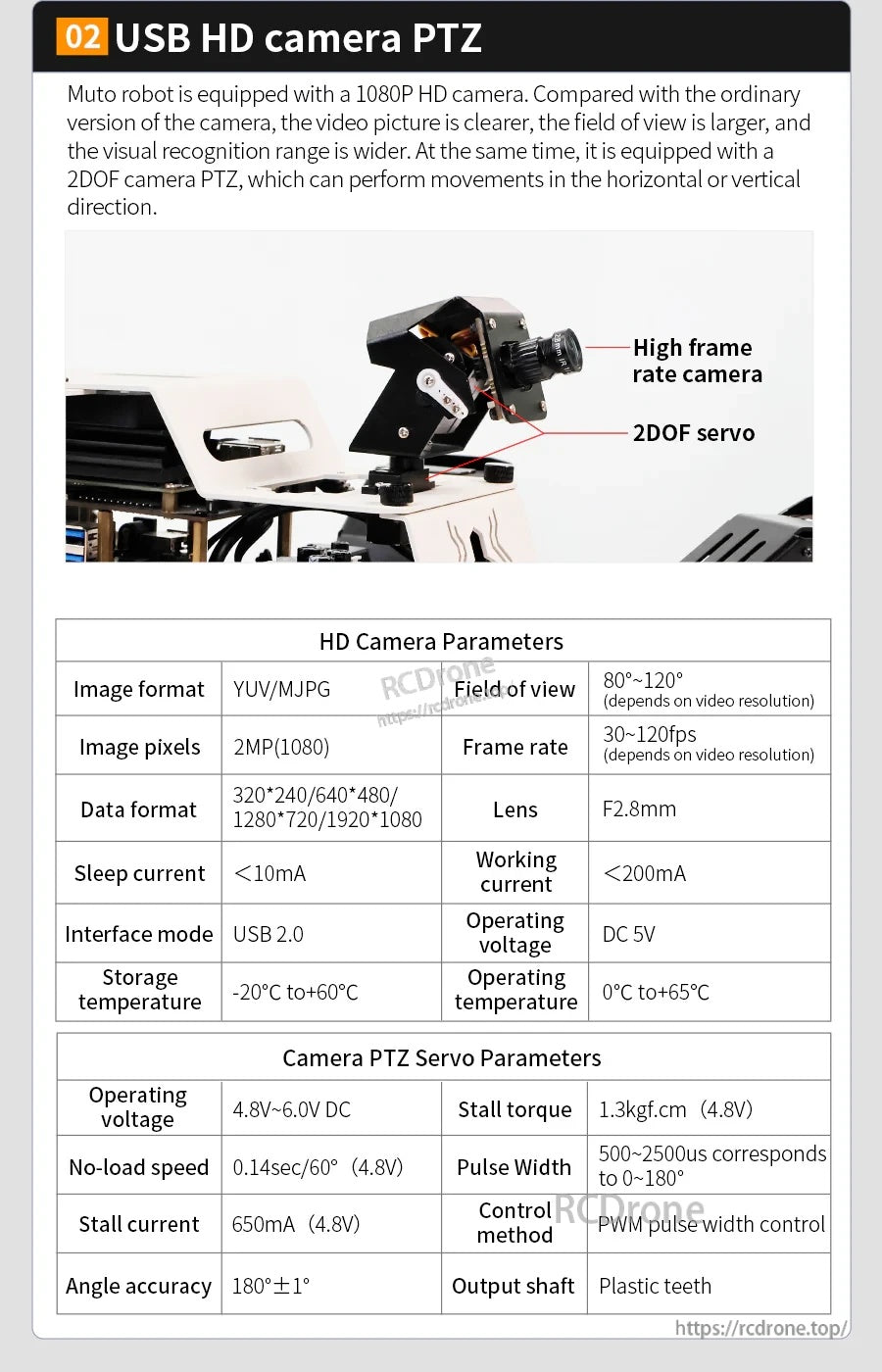
USB HD 1080P kamera PTZ, pan/tilt kontrolü için 2DOF servo kullanır ve USB 2.0 üzerinden bağlanır, 80–120° görüş alanına kadar destekler.
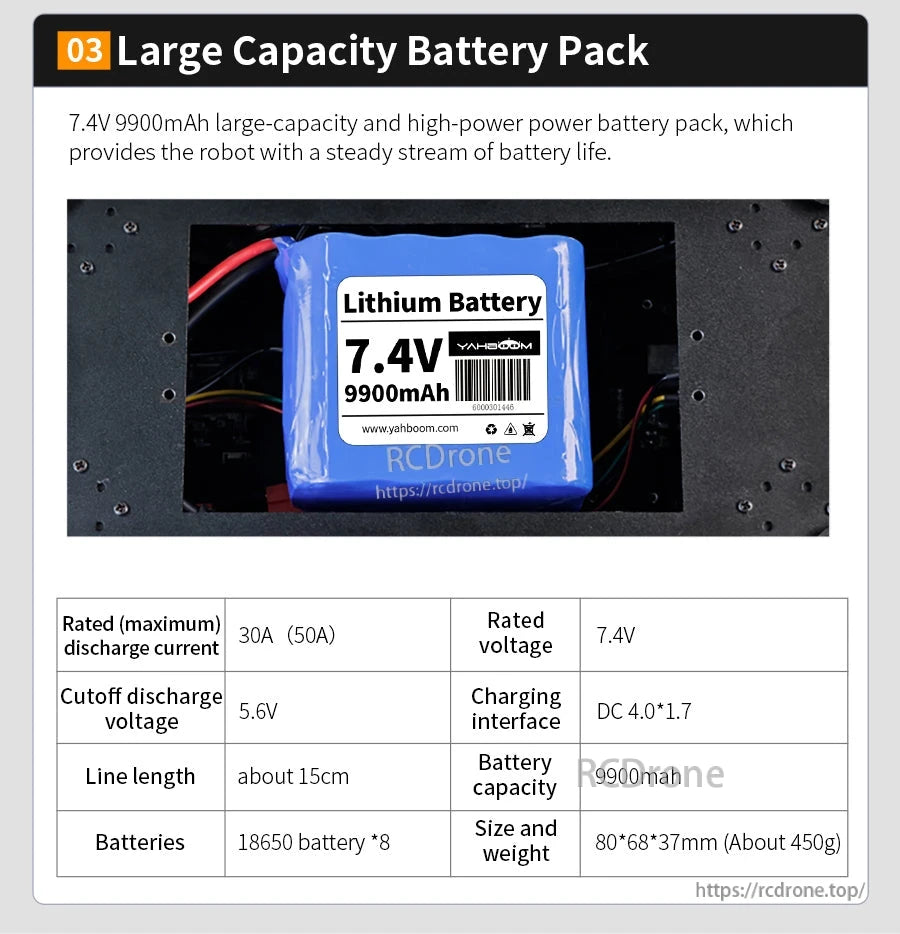
7.4V 9900mAh lityum pil paketi, kolay bağlantı için DC 4.0×1.7 şarj arayüzü ve yaklaşık 15cm kablo kullanır.
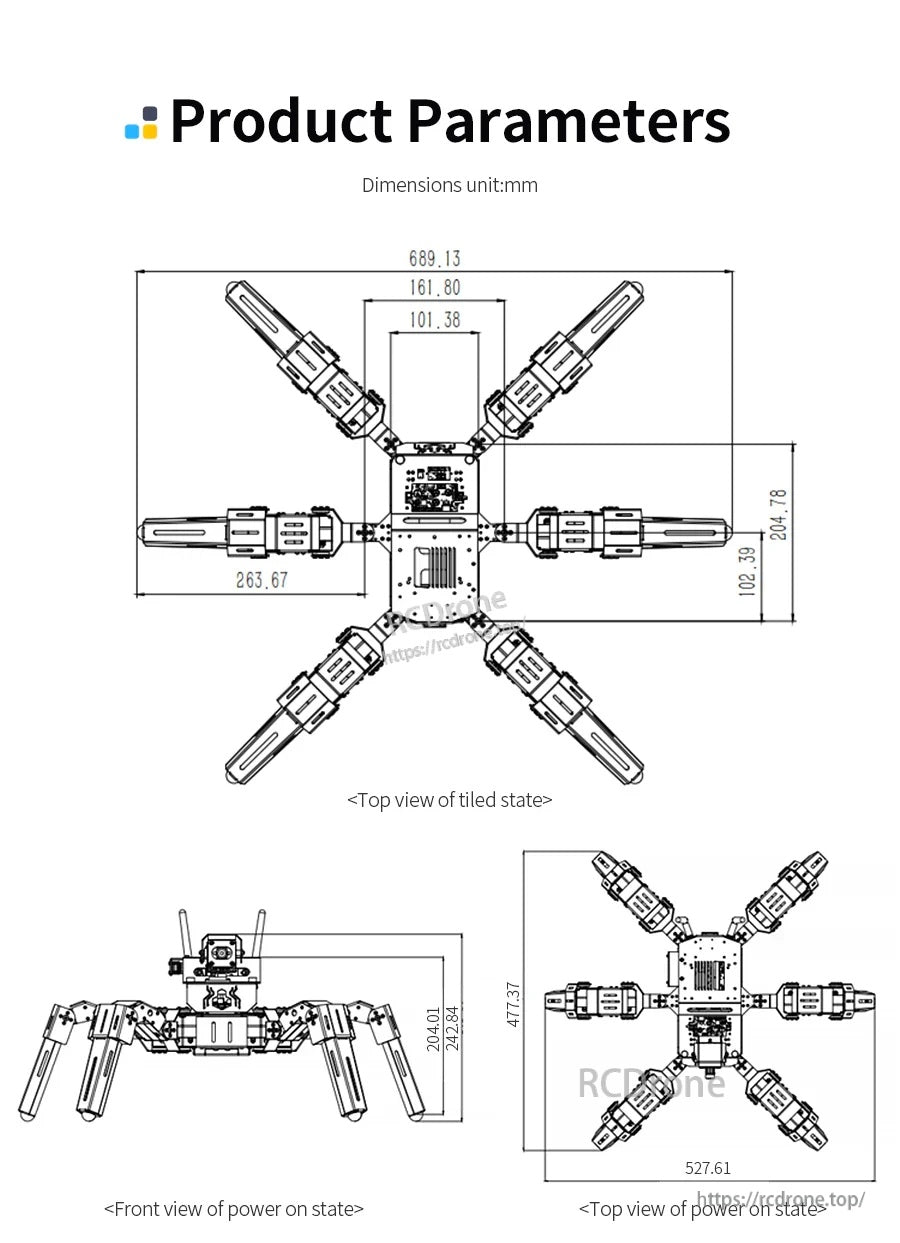
Yahboom Muto S2, yerleştirme ve boşluk planlaması için milimetre cinsinden ölçümlerle üst ve ön görünümleri gösteren boyutlandırılmış bir düzen ile birlikte gelir.
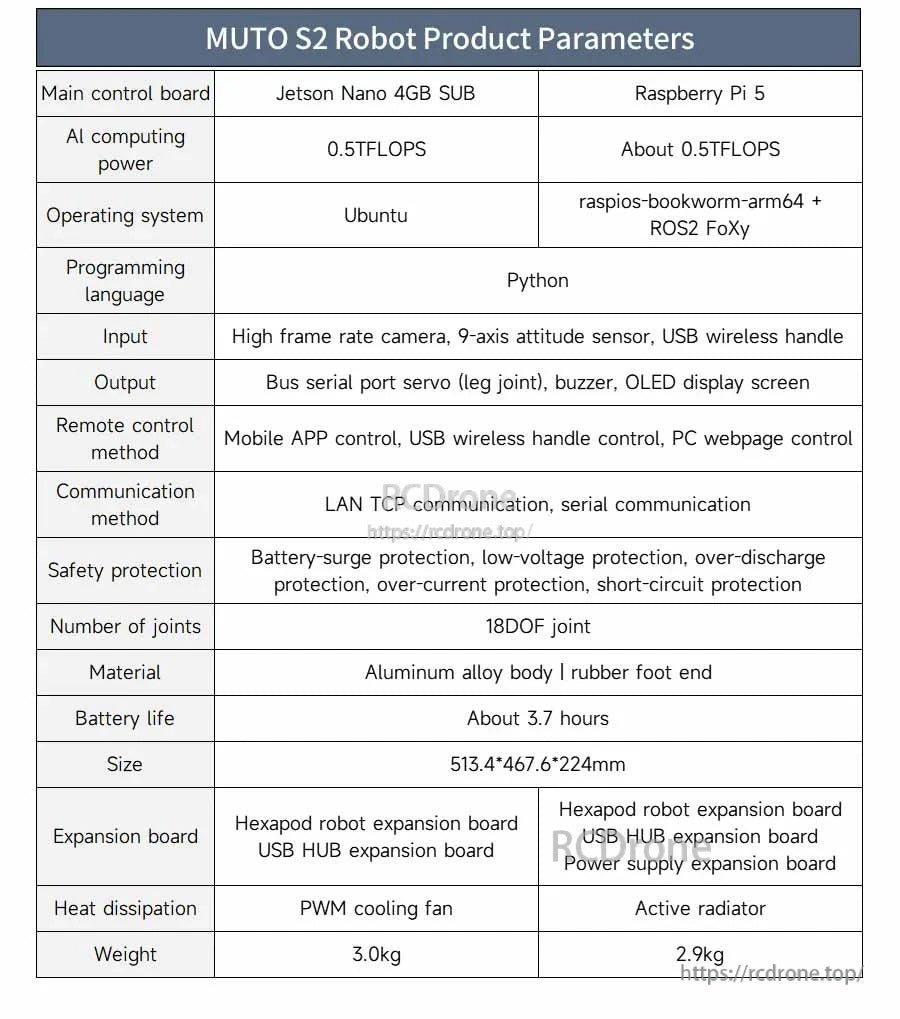
MUTO S2, Python'u destekleyen, 18DOF eklemleri ve yaklaşık 3.7 saat pil ömrü sunan Jetson Nano 4GB USB veya Raspberry Pi 5 ana kontrol kartı ile mevcuttur.
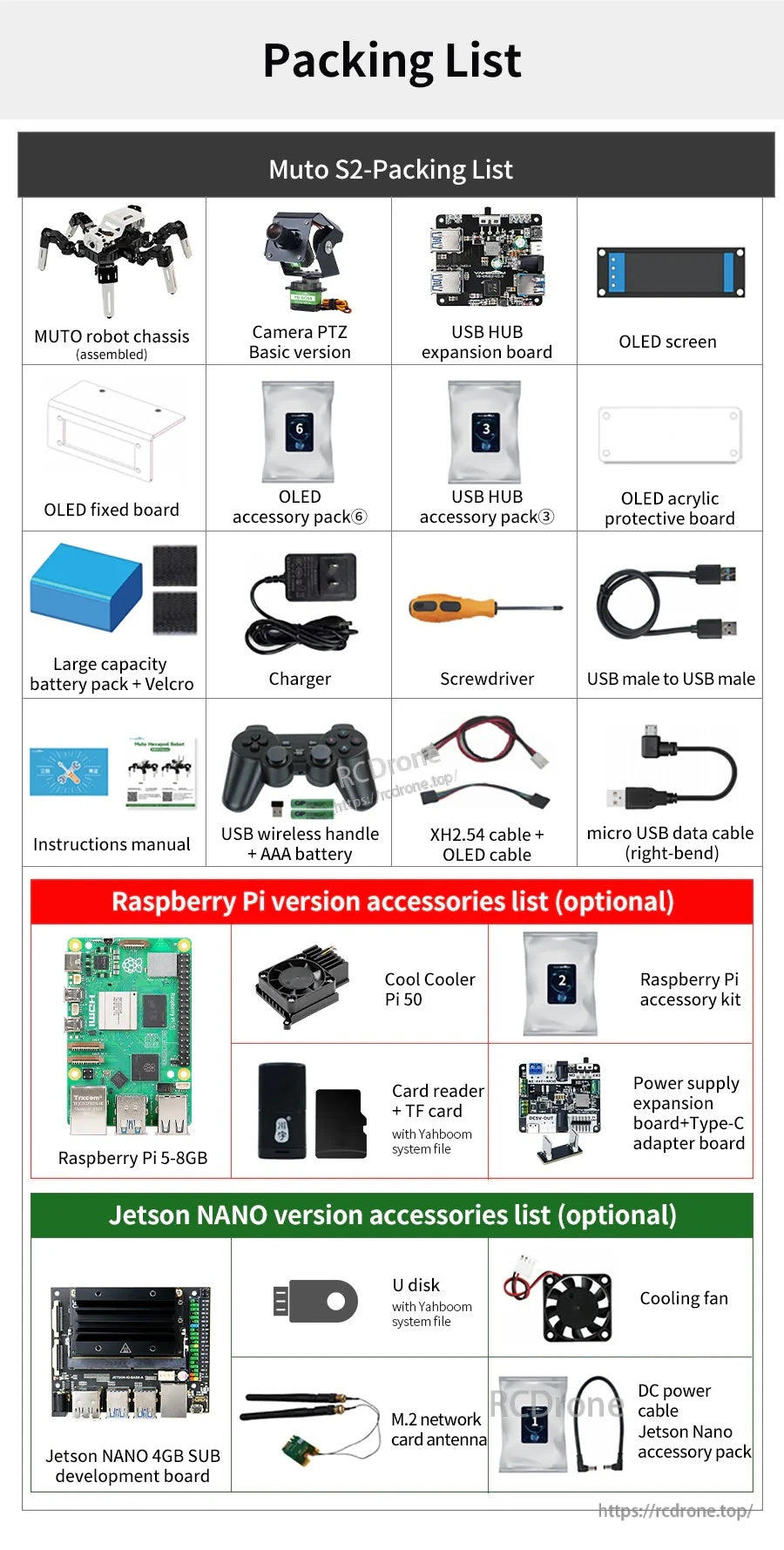
Muto S2 hexapod kiti, robot şasisi, PTZ kamera modülü, OLED bileşenleri, USB hub genişletme kartı, pil paketi, şarj cihazı, kablolar ve temel araçları içerir, Raspberry Pi veya Jetson Nano aksesuarları ek olarak listelenmiştir‑
Related Collections











