

















SteadyWin GIM3505-8 Вбудований планетарний редукторний мотор — модуль суглоба квадрупедного робота, передача 8:1, 24В, CAN, IP54
SteadyWin GIM3505-8 Вбудований планетарний редукторний мотор — модуль суглоба квадрупедного робота, передача 8:1, 24В, CAN, IP54
SteadyWin
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
SteadyWin GIM3505-8 вбудований планетарний редукторний мотор для квадрупедного робота, спроектований для компактних роботизованих суглобів та приводних вузлів. GIM3505-8 інтегрує планетарний редуктор 8:1 з безщітковим мотором та варіантами вбудованого драйвера для забезпечення контрольованого руху квадрупедних роботів, роботизованих рук, гуманоїдних суглобів та подібних мехатронних систем.
Ключові особливості
- Сучасна планетарна передача для низького зворотного ходу та плавного руху (зворотний хід передачі: 15 дугових хвилин).
- Широка адаптивність до напруги: номінальна напруга 24 В з робочим діапазоном 12~48 В.
- Висока щільність крутного моменту та ефективність: постійна крутного моменту 0.52 N·m/A з номінальним крутним моментом 0.65 N·m та піковим крутним моментом 1.27 N·m.
- Компактний розмір: Ø43 × 23.6 мм (без драйвера); Ø43 × 30 мм (з драйвером).
- Інтегровані засоби безпеки: захист від перегріву, перенапруги та перевантаження (трислойний захист, зазначений у документації продукту).
- Інтерфейс зв'язку CAN; підтримує окремий енкодер та необов'язкове індивідуальне гальмо.
Технічні характеристики
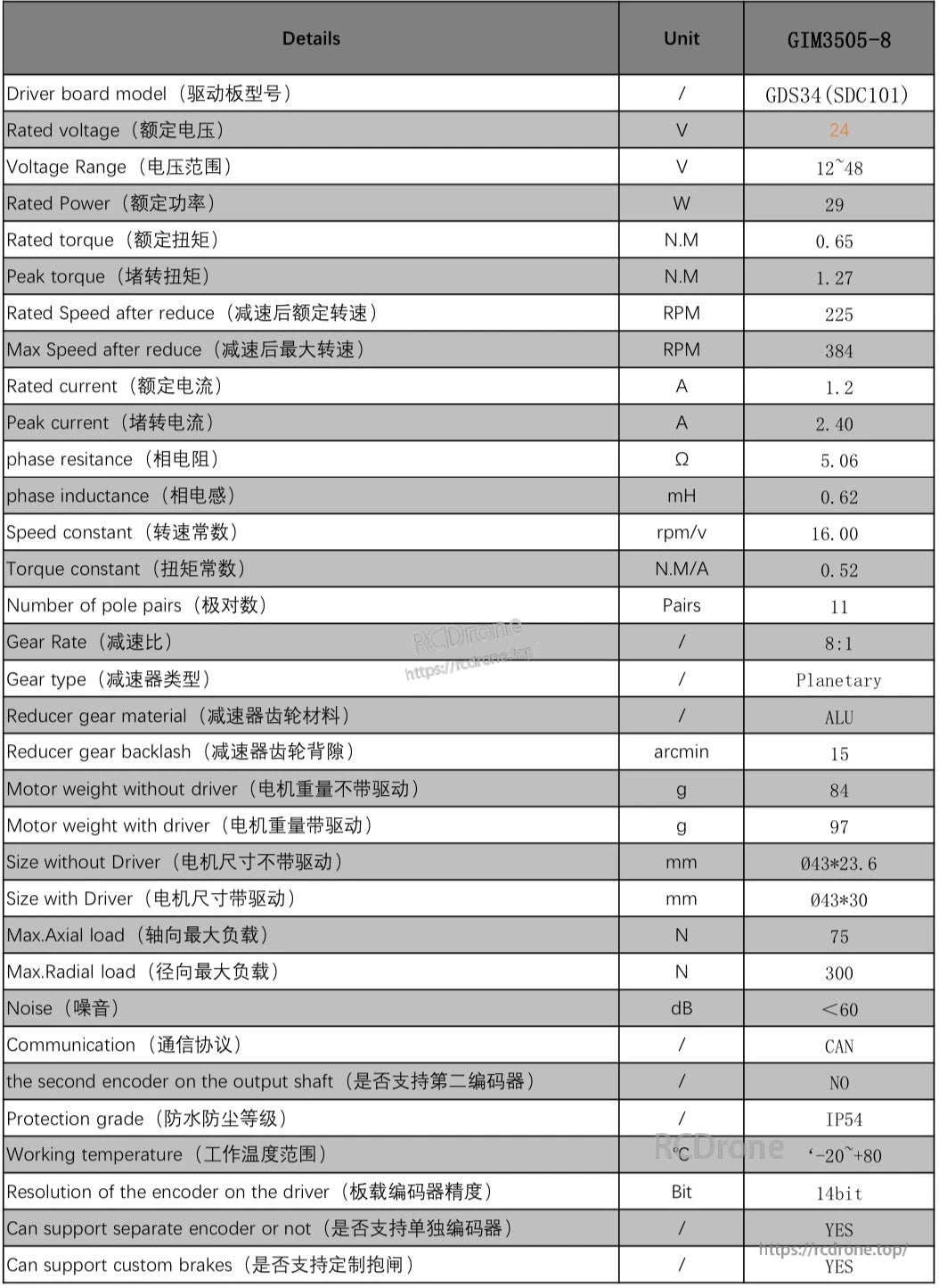
Параметр Значення ---------------------------------------- -------------------------- Модель GIM3505-8 Модель плати драйвера GDS34 (SDC101) Номінальна напруга 24 В Діапазон напруги 12~48 В Номінальна потужність 29 Вт Номінальний крутний момент 0.65 N·м Максимальний (стопорний) крутний момент 1.27 N·м Номінальна швидкість після редукції 225 об/хв Максимальна швидкість після редукції 384 об/хв Номінальний струм 1.2 А Максимальний (стопорний) струм 2.4 А Опір фази 5.06 Ω Індуктивність фази 0.62 мГн Постійна швидкість 16 об/хв/В Постійний момент 0.52 Н·м/А Кількість пар полюсів 11 пар Передавальне співвідношення 8:1 Тип передачі Планетарна Матеріал редуктора Алюміній Зазор редуктора 15 дуг. хв. Вага мотора (без драйвера) 84 г Вага мотора (з драйвером) 97 г Розмір (без драйвера) Ø43*23.6 мм Розмір (з приводом) Ø43*30 мм Максимальне осьове навантаження 75 Н Максимальне радіальне навантаження 300 Н Шум <60 дБ Зв'язок CAN Другий енкодер на вихідному валу НІ Клас захисту IP54 Температура експлуатації -20°C до +80°C Роздільна здатність енкодера на приводі 14 біт Окрема підтримка енкодера ТАК Індивідуальна підтримка гальма ТАК
Застосування
- Чотириногі роботи (суглоби та приводи ніг)
- Суглоби гуманоїдних роботів
- Роботизовані руки та маніпулятори
- Приводи екзоскелетів
- Модулі керування та артикуляції AGV/AMR
- Автономні дослідницькі та університетські проекти в галузі робототехніки
Для запитів щодо обслуговування клієнтів та технічних запитів звертайтеся до [email protected].
Посібники
Деталі


SteadyWin технічні характеристики GIM3505-8: 24V, 29W, 0.65N.M крутний момент, планетарний редуктор, CAN зв'язок, клас захисту IP54, підтримує індивідуальні гальма та окремі енкодери, працює в діапазоні -20°C до +80°C.
Related Collections

















