




Набір роботизованої руки CEREBOTO OpenArm 7DOF – DIY або зібраний, відкритий код, керування ROS/Python
Набір роботизованої руки CEREBOTO OpenArm 7DOF – DIY або зібраний, відкритий код, керування ROS/Python
CEREBOTO
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
Роботизована рука CEREBOTO OpenArm 7DOF є дослідницьким класом, роботизованою рукою людського масштабу, розробленою для університетів, лабораторій, стартапів та серйозних виробників. З 7 ступенями свободи, досяжністю руки 633 мм, типовим навантаженням 4,1 кг та піковим навантаженням 6,0 кг на руку, OpenArm забезпечує високу точність руху, безпечну фізичну взаємодію та багаті інструменти з відкритим кодом.
Ви можете вибрати комплект апаратного забезпечення для самостійної збірки або готову до використання, фабрично відкалібровану руку. Доступні конфігурації з одною рукою, двома руками та чотирма руками.
Ключові особливості
-
Роботизована рука людського масштабу 7DOF – розроблена для відповідності довжині людської руки 160–165 см для природного маніпулювання та телепередачі.
-
Високе навантаження &та стабільність – типове навантаження 4,1 кг, пікове навантаження 6,0 кг на руку, з вагою руки 5,5 кг.
-
Мотори з можливістю зворотного приводу &і гнучка структура – безпечна, плавна взаємодія для співпраці людини з роботом та завдань з контролем сили.
-
Контрольна петля CAN-FD на 1 кГц – управління в реальному часі з низькою затримкою для високопродуктивних досліджень та промислових застосувань.
-
Повністю металеве виконання – міцна основна структура з алюмінієвого сплаву та нержавіючої сталі для жорсткості та довговічності.
-
Відкрите апаратне &і програмне забезпечення – відкриті CAD, PCB, прошивка та програмне забезпечення для контролю для глибокої кастомізації.
-
Підтримка ROS, Python та C++ – офіційна інтеграція ROS плюс API Python/C++ для швидкої розробки алгоритмів.
-
Багата екосистема та розширення – підтримує спритні роботизовані руки, рукавички для захоплення руху та мобільні бази для повноцінних роботизованих платформ.
Технічні характеристики
-
Кількість ступенів свободи: 7 DOF на руку
-
Дальність руки: 633 мм
-
Типове навантаження: 4.1 кг
-
Максимальне навантаження: 6.0 кг на руку
-
Вага руки: приблизно 5.5 кг на руку
-
Матеріали: алюмінієві сплави та конструкційні частини з нержавіючої сталі
-
Інтерфейс управління: CAN / CAN-FD, UART (через включений адаптер USB2CANFD-X2 на версіях з двома/чотирма руками)
-
Частота управління: до 1 кГц CAN-FD цикл
-
Підтримка програмного забезпечення: ROS фреймворк, Python API, C++ API
-
Ергономіка: довжина руки, що підходить для користувачів з ростом 160–165 см
Програмне забезпечення &та екосистема з відкритим кодом
OpenArm - це повністю відкрита платформа роботизованих рук.Офіційні ресурси включають:
-
Вебсайт: openarm.dev
-
Документація: docs.openarm.dev
-
GitHub: github.com/enactic/openarm
-
Відео-урок: офіційний посібник YouTube для початку
З відкритими файлами CAD, PCB та прошивки ви можете модифікувати механіку, електроніку та програмне забезпечення управління, або розширити руку новими сенсорами та кінцевими ефекторами для ваших власних дослідницьких тем.
Типові сценарії застосування
OpenArm розроблений як універсальна, високоточна платформа для досліджень та навчання для:
-
Курсів робототехніки в університетах та лабораторних експериментів
-
Дослідницьких інститутів та лабораторних проектів
-
Досліджень навчання з підкріпленням та фізично обґрунтованого штучного інтелекту
-
Взаємодії людини з роботом та досліджень колаборативних роботів
-
Мейкерських просторів та команд з відкритим апаратним забезпеченням
-
Платформ для інженерної освіти та навчання
Завдяки своєму розміру в людському масштабі та сумісному актуатору, OpenArm ідеально підходить для маніпуляцій, телеправління, навчання наслідуванню, асистивної робототехніки та багато іншого.
Версії продукту &та конфігурації
Версія 1 – Набір апаратного забезпечення для самостійного складання
-
Для користувачів з сильними практичними навичками, які хочуть глибоко зрозуміти механічну структуру.
-
Включає всі механічні, електричні та 3D-друковані частини; ви самостійно збираєте та калібруєте руку, слідуючи інструкції.
Версія 2 – Готова роботизована рука
-
Для науково-дослідних інститутів, лабораторій, компаній та освітян, яким потрібна платформа "підключи та працюй".
-
Повністю зібрана, налаштована та калібрована перед відправкою; готова до використання з коробки.
Доступні конфігурації рук (залежно від списку):
-
Набір для самостійної збірки – Одна рука
-
Готова рука – Одна рука
-
Набір для самостійної збірки – Дві руки
-
Готові руки – Дві руки
-
Набір для самостійної збірки – Чотири руки
-
Готові руки – Чотири руки
Зміст пакету
Кожен набір OpenArm або готова система зазвичай включає:
-
Основні структурні компоненти з алюмінієвого сплаву та нержавіючої сталі
-
Двигуни, плати драйверів, блок живлення та кабелі
-
Деталі, надруковані на 3D-принтері, та набори гвинтів
Версії з двома і чотирма руками: один офіційний пристрій, сумісний з BOM USB2CANFD-X2 (CEREBOTO є уповноваженим внутрішнім агентом) для зв'язку ПК з CAN-FD.
Підтримувані апаратні розширення
OpenArm підтримує кілька апаратних доповнень (продаються окремо), що дозволяє вам створити повну роботизовану систему:
-
Декстерна роботизована рука – для тонкого маніпулювання та досліджень захоплення.
-
Набір рукавичок для захоплення руху – для інтуїтивного телепереміщення та навчання імітації.
-
Мобільна база – щоб перетворити OpenArm на мобільну маніпуляторну платформу.
Часті запитання
Q: Чи можна відразу використовувати роботизовану руку?
A: Версія готової руки повністю налаштована та відкалібрована на заводі — просто увімкніть її та почніть працювати. Набір апаратного забезпечення DIY вимагає, щоб ви зібрали та налаштували систему відповідно до інструкцій.
Q: Чи сумісний OpenArm з ROS або іншими проміжними програмами?
A: Так. OpenArm офіційно підтримує фреймворк ROS, а також ви можете керувати рукою через API на Python та C++.
Q: Для кого призначений цей продукт?
A: Дослідники університетів та інститутів, лабораторії штучного інтелекту &та робототехніки, навчальні курси, центри інженерної підготовки та просунуті хобісти.
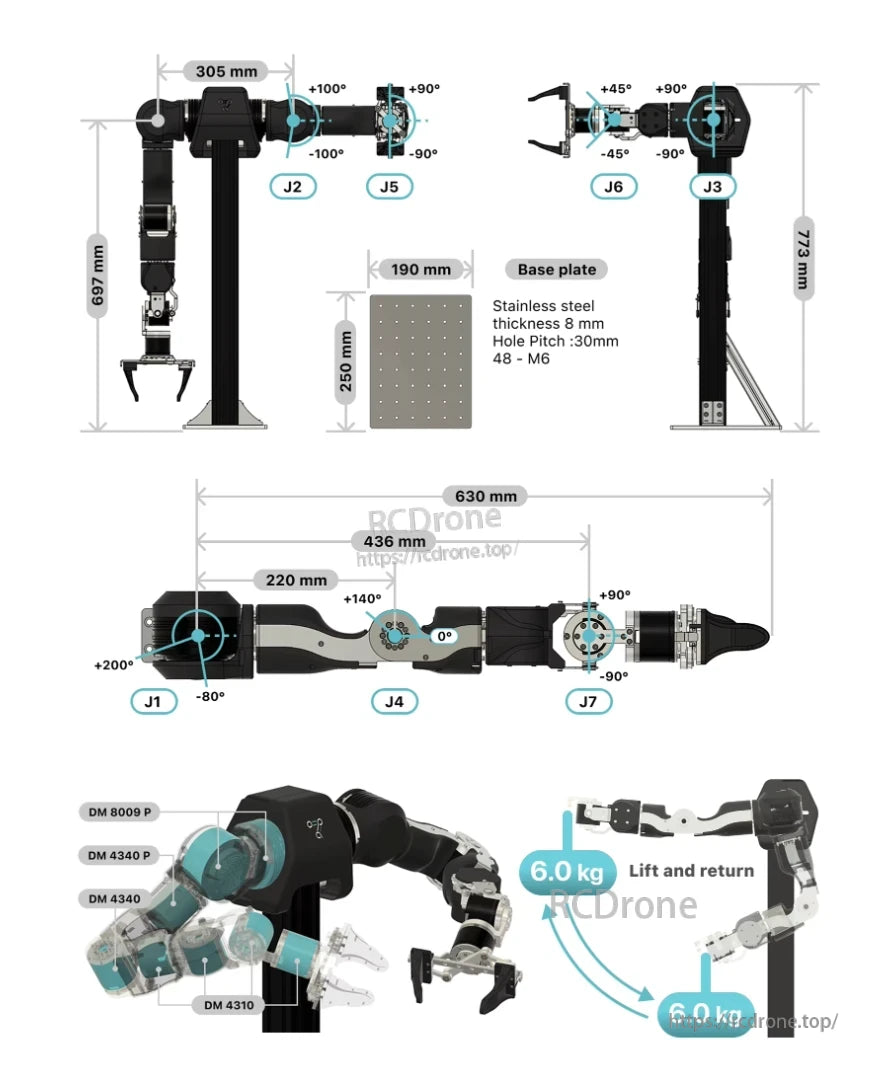
Роботизована рука Cereboto OpenArm 7DOF має сім суглобів (J1–J7) з визначеними кутовими діапазонами. Вона має висоту 697 мм або 773 мм, досягає 630 мм і монтується на основі з нержавіючої сталі розміром 190×250 мм — товщиною 8 мм з 48 отворами M6, розташованими з кроком 30 мм. Приводиться в дію моторами DM8009P, DM4340P, DM4340 та DM4310, вона обробляє вантажі до 6,0 кг з точністю. Розроблена для промислового та дослідницького використання, вона поєднує структурну міцність з точною системою керування рухом.

Related Collections



