








CUAV X25 EVO Автопілотний контролер польоту - STM32H7, потрійний IMU, подвійний барометр, RM3100, CAN, 16 PWM, PX4/ArduPilot
CUAV X25 EVO Автопілотний контролер польоту - STM32H7, потрійний IMU, подвійний барометр, RM3100, CAN, 16 PWM, PX4/ArduPilot
CUAV
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
CUAV X25 EVO є контролером з високою надійністю для безпілотних систем. Він поєднує процесор STM32H7 (480 МГц, 2 МБ Flash) з триразовим промисловим IMU масивом, подвійними барометрами та магнітометрами RM3100. Перероблена архітектура живлення підтримує 10–18 В на вході та забезпечує до 5 В/12 А зовнішнього виходу для живлення важких вантажів. Контролер інтегрує подвійну резервовану систему живлення, всебічний захист від ЕМП/перепадів струму, RGB індикацію стану та модульний дизайн CORE/носія. Він сумісний з ArduPilot та PX4, і підходить для мультикоптерів, літаків з фіксованим крилом, VTOL, вертольотів, UGV/USV/UUV та інших платформ.
Ключові особливості
-
Високопродуктивні обчислення: STM32H7 @ 480 МГц, 2 МБ Flash; низьке використання ЦП для складних алгоритмів (навігація без GPS, FFT фільтри, LUA скрипти).
-
Промисловий сенсорний комплект:
-
IMU: 2× TDK IIM-42653 (±4000 °/с, ±32 g) + 1× TDK IIM-42652 (±2000 °/с, ±16 g).
-
Магнітометри: PNI RM3100 (антиінтерференційний).
-
Барометри: TDK ICP20100 & Bosch BMP581 (подвійний).
-
Гетерогенна матриця IMU з відмовостійким перемиканням.
-
-
Система компенсації температури з подвійним контролем для IMU: компенсація в реальному часі ±0.5 °C; у порівнянні з попереднім поколінням—15% нижчий дрейф температури, 25% краща узгодженість рішення щодо орієнтації.
-
Ізоляція вібрацій: 4-е покоління нахиленої симетричної нейлонової матриці демпфування; опціональні зовнішні фіксовані вушні ізолятори для придушення аномально високочастотних вібрацій та покращення достовірності даних.
-
Енергетична архітектура: вбудований 5 В/15 А високопотужний DC-DC; зовнішній порт підтримує 5 В/12 А вихід; діапазон вхідної напруги 10–18 В.
-
Мережі &та шини: CAN шина (розумний акумулятор/ESC/серво, зворотний зв'язок телеметрії) + 100 М Ethernet.
-
Багаторазові I/O: до 16 PWM через серво порти; до 32 PWM через розширення CAN.
-
Устойчивість &та QA: двоканальна резервність живлення, захист від ESD &та перевантаження, антистатичний дизайн роз'єму, конформне покриття PCB та повністю автоматизоване тестування.
-
RGB індикатор стану: багатокольорові світлодіоди для збройового режиму, живлення, GNSS/позиції, режимів несправностей тощо.
html
Специфікації
| Категорія | Деталі |
|---|---|
| Процесор | STM32H7 Arm® Cortex®-M7 @ 480 МГц, 2 МБ Flash |
| Версія | X25 EVO |
| IMU | IIM-42653 ×2 (гіроскоп ±4000 °/с; акселерометр ±32 g); IIM-42652 ×1 (гіроскоп ±2000 °/с; акселерометр ±16 g) |
| Магнітометр | RM3100 |
| Барометри | TDK ICP20100 / Bosch BMP581 (подвійний) |
| PWM виходи | 16 (серво банк M1–M16) |
| Вхід живлення (CAN) | 2 |
| GPS порти | 2 |
| TELEM порти | 2 |
| UART4 | 1 |
| RC вхід | 1 (PPM / SBUS / DSM тощоhtml ) |
| DEBUG (DSU) | 1 |
| Ethernet | 1 (100 M) |
| CAN | CAN1 ×3, CAN2 ×2 (всього 5) |
| SPI6 розширення | 1 |
| ADC | 1× 3V3, 1× 6V6 |
| USB | 1× Type-C |
| I²C | 3 |
| RSSI | 1 |
| Модуль живлення | PMU 2 Lite |
Умови експлуатації &та фізичні
| Товар | Значення |
|---|---|
| Вхідна напруга (контролер) | 10–18 В |
| USB | 4.75–5.25 V |
| Діапазон живлення PMU 2 Lite | 20–70 V |
| Зовнішня шина 5 V | до 12 A виходу (для периферійних пристроїв/важких вантажів) |
| Температура експлуатації | −20 °C до +85 °C |
| Розміри | 76.5 × 45.45 × 32.2 мм |
| Вага | 110 г |
Інтерфейси &та основні особливості макета
-
Подвійні POWER C1/C2 шини, RC IN, M1–M16 сервобанк.
-
Бічні з'єднувачі для UART/TELEM, ADC, USB-C (debug/IO), I²C, CAN1/CAN2, ETH.
-
Розроблений CORE, який можна від'єднати для розробки кастомної плати носія.
Сумісність &та застосування
-
ПЗ: повністю сумісне з ArduPilot та PX4 (драйвери &та функції).
-
Транспортні засоби: мультикоптери, літаки з фіксованим крилом, VTOL, вертольоти, UGV, USV, UUV/підводні, та інші безпілотні платформи.
У комплекті (X25 EVO Kit)
-
X25 EVO контролер польоту × 1
-
CAN PMU2 Lite (15 V) модуль живлення × 1
-
CAN розширювальна плата × 1
-
CAN дані кабелі (35 см) × 2
-
USB Type-C кабель (100 см) × 1
-
TELEM кабелі (30 см) × 2
-
RSSI кабель (22 см) × 1
-
RC IN кабель (30 см) × 1
-
CAN PMU2 Lite 15 V смарт контролер кабель живлення (30 см) × 1
Деталі

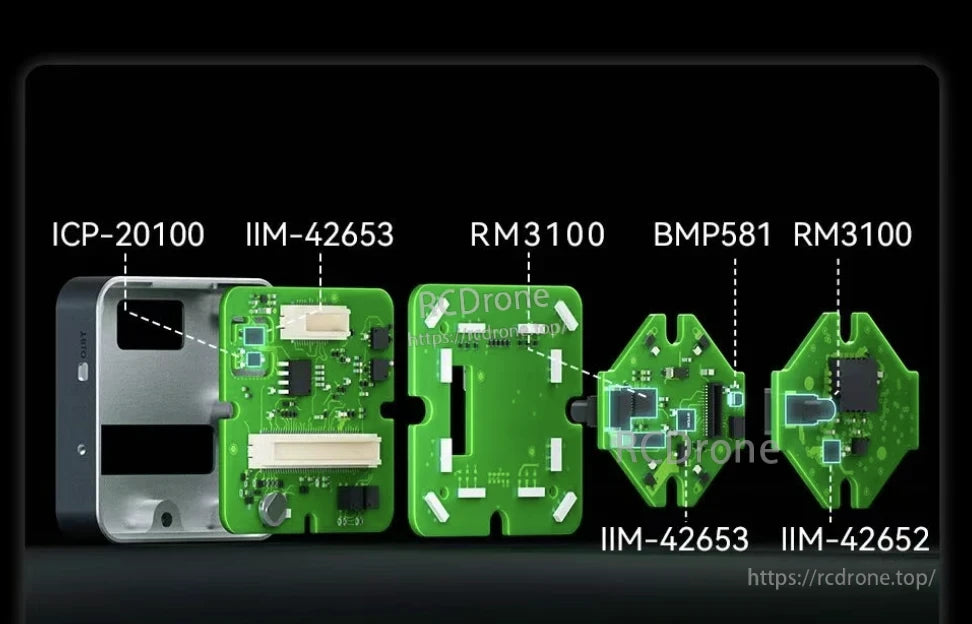
CUAV X25 EVO компоненти контролера польоту, позначені моделями чіпів.


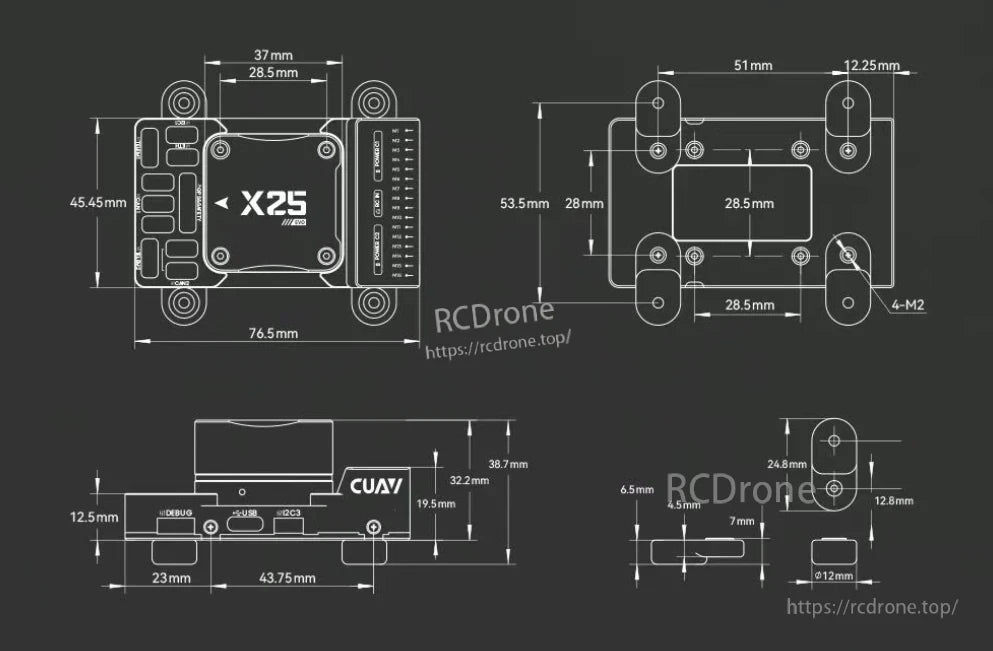
CUAV X25 EVO контролер польотів має розміри 76.5мм x 45.45мм, оснащений портами для налагодження, USB та I2C3, а також включає чотири гвинти M2 для надійного кріплення.

X25 EVO Автопілот включає контролер польотів, модуль живлення, плату розширення CAN, кабелі даних та телеметрії, кабель Type-C, дроти RSSI та RC IN, а також лінію живлення.
Related Collections








