




Фрамлесний внутрішній мотор CubeMars RI60 KV120 | 0,57 Нм, 120KV, 48В BLDC для коботів і екзоскелетів
Фрамлесний внутрішній мотор CubeMars RI60 KV120 | 0,57 Нм, 120KV, 48В BLDC для коботів і екзоскелетів
CubeMars
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
Мотор CubeMars RI60 KV120 безрамний Inrunner розроблений для компактних, високопродуктивних роботизованих застосувань. Підтримуючи робочі напруги 24V/36V/48V, цей безрамний BLDC мотор забезпечує високу щільність крутного моменту, плавний рух з низьким крутним моментом та точну роздільну здатність контролю 0.01°. З компактним зовнішнім діаметром Φ60mm та вагою всього 155.9g, він ідеально підходить для рук колаборативних роботів, екзоскелетів та роботизованих суглобів з обмеженим простором.
Цей мотор має ручний обмотуваний статер для оптимального коефіцієнта заповнення міді, криві постійні магніти для ефективної синусоїдальної реакції BEMF та варіанти для інтеграції датчика Холла та енкодера. Він підтримує керування з орієнтацією на поле (FOC), надійно працює в діапазоні температур від -20°C до 50°C і витримує до 1.63 Нм пікового моменту. Версія з підвищеним ротором підвищує точність датчика Холла, збільшуючи діапазон виявлення на 2 мм.
Ключові особливості
-
Безрамна конструкція BLDC з внутрішнім ротором – без зовнішнього корпусу, ідеально підходить для вбудованих установок
-
Висока щільність моменту – максимальне співвідношення моменту до ваги 10.46 Нм/кг
-
Точне керування – сумісний з енкодерами високої роздільної здатності, підтримує 0.01° позиціонування
-
Низький крутний момент при обертанні – Плавна робота, зменшена вібрація та шум
-
Термостійкість – Працює в умовах навколишнього середовища при температурах від -20°C до 50°C
-
Багаторазові інтерфейси управління – Підтримує зворотний зв'язок з енкодером та датчиком Холла
-
Ручний обмотувальний статер – Відмінне заповнення міддю, 0.5мм зазор для легкого складання
-
Додаткова версія ротора – +2мм висота ротора покращує вирівнювання датчика Холла
Технічні характеристики
Застосування та конфігурація
| Параметр | Значення |
|---|---|
| Застосування | Рука-колаборатор / Екзоскелет |
| Спосіб приводу | FOC |
| Фаза | 3 фази |
| Тип обмотки | Дельта |
| Пар півдоларів | 14 |
| Клас ізоляції | C |
| Напруга ізоляції | 500В 5мА/2с |
| Опір ізоляції | 500В 10МΩ |
| Температура експлуатації | -20℃ ~ 50℃ |
Електричні характеристики
| Параметр | Значення |
|---|---|
| Номінальна напруга (В) | 24 / 36 / 48 |
| Швидкість без навантаження (об/хв) | 2532 / 3798 / 5064 |
| Номінальна швидкість (об/хв) | 1440 / 2320 / 3190 |
| Номінальний момент (Нм) | 0.57 |
| Піковий момент (Нм) | 1.63 |
| Номінальний струм (А) | 5.6 |
| Піковий струм (А) | 16.8 |
| Kv (об/хв/В) | 120 |
| Ke (В/коб/хв) | 9.03 |
| Kt (Нм/А) | 0.100 |
| Опір фази (мΩ) | 900 |
| Індуктивність фази (μH) | 877.5 |
| Інерція (г·см²) | 33.05 |
| Км (Нм/√Вт) | 0.1054 |
| Механічна часова константа (мс) | 0.3 |
| Електрична часова константа (мс) | 0.98 |
| Вага (г) | 155.9 |
| Співвідношення моменту/ваги | 10.46 Нм/кг |
Варіанти енкодера та датчика Холла
-
З датчиком Холла: Покращене визначення ротора, рекомендовано для високоточних вимірювань позиції
-
Без датчика Холла: Компактний дизайн для обмежених умов
-
Підтримувані енкодери: Renishaw, Sick, інші високоточні енкодери (0.01° розділення)
Механічні розміри
| Версія | Зовнішній діаметр | Внутрішній діаметр | Висота ротора | Максимальна товщина |
|---|---|---|---|---|
| Без датчика Холла | Ø60 мм | Ø30 мм | 15 мм | 21 мм (макс) |
| З датчиком Холла | Ø60 мм | Ø30 мм | 15 мм | 23 мм (макс) |
Зверніться до технічних креслень для точних допусків та схем монтажних отворів.
Крива продуктивності
Випробувано при 24VDC:
-
Максимальна ефективність при ~0.3 Нм
-
Пікова вихідна потужність >125W при ~1.1 Нм
-
Максимальна швидкість ~2500 об/хв
-
Стабільна реакція струму в діапазоні крутного моменту
Інформація про проводку та з'єднувачі
| Провід | Колір + Розмір |
|---|---|
| U | Чорний + 18# силікон |
| V | Жовтий + 18# силікон |
| W | Червоний + 18# силікон |
| Hu | Синій + 30# силікон |
| Hv | Зелений + 30# силікон |
| Hw | Жовтий + 30# силікон |
| VCC | Червоний + 30# силікон |
| GND | Чорний + 30# силікон |
Схема підключення:
Hu-U, Hv-V, Hw-W
Завантаження посібників
Застосування
-
Співпраця роботизованих рук
-
Суглоби екзоскелетів
-
Роботи на ніжках та чотириногі
-
Прецизійна медична робототехніка
-
Вбудовані серво-модулі
Деталі
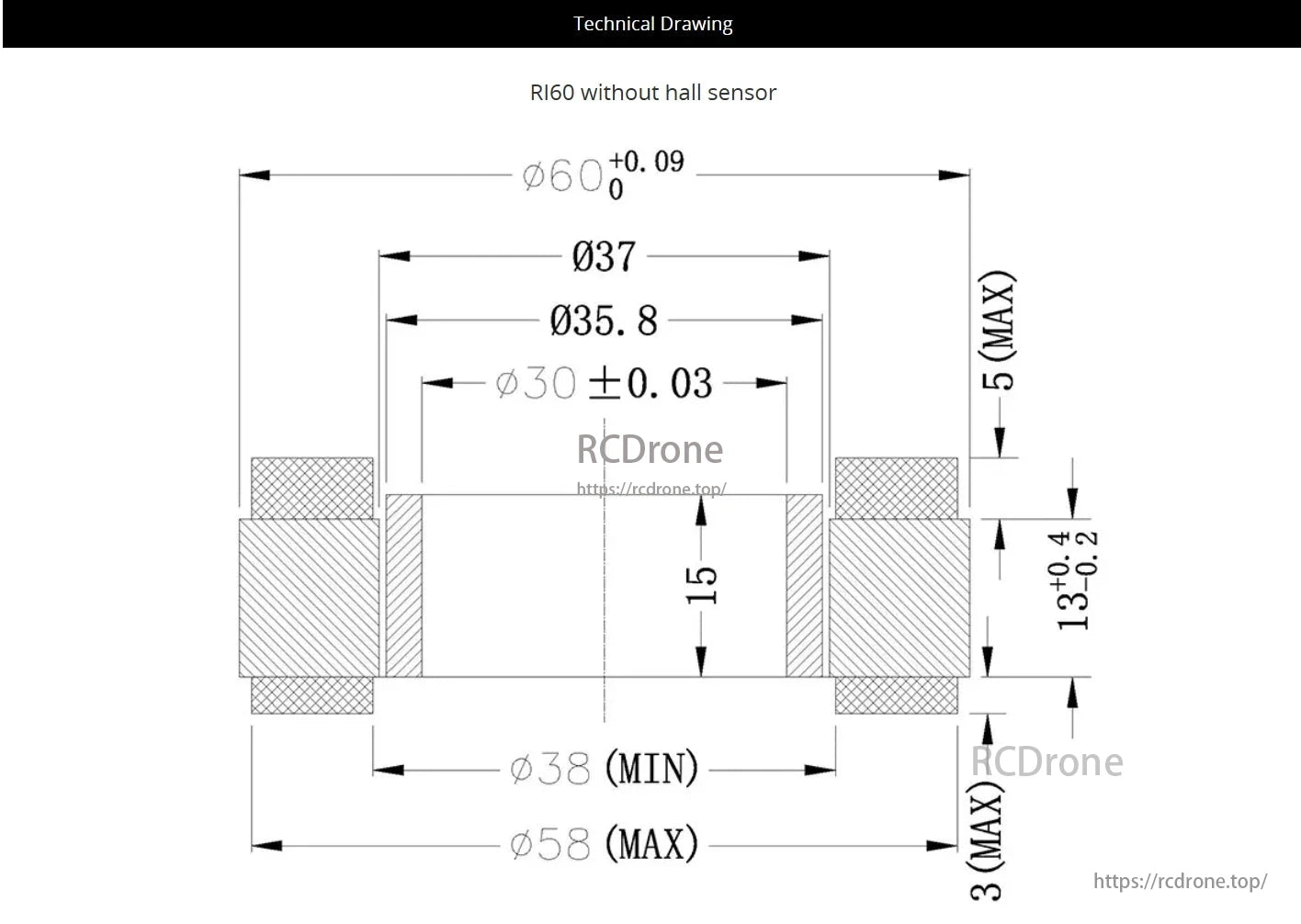
CubeMars Розміри мотора RI60: Ø60, Ø37, Ø35.8, Ø30, Ø38 (мін), Ø58 (макс), 15 довжина, 5 макс висота, 13 ±0.4 ширина.
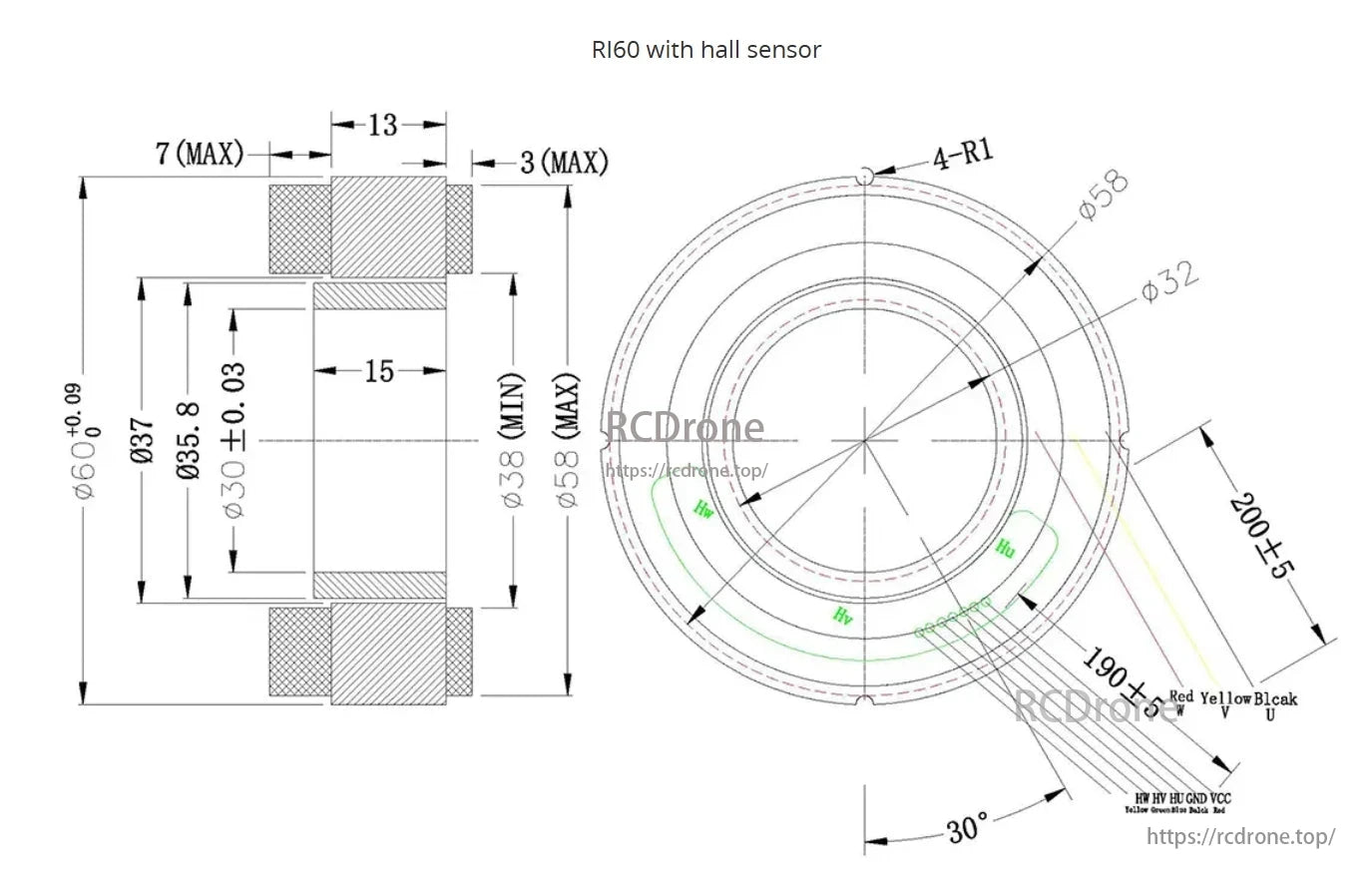
Мотор CubeMars RI60 з датчиком Холла. Розміри: діаметр 60 мм, довжина 200 мм. Має позначки 4-R1, φ58, φ32 та кут 30°. Включає етикетки HW, HV, HU.
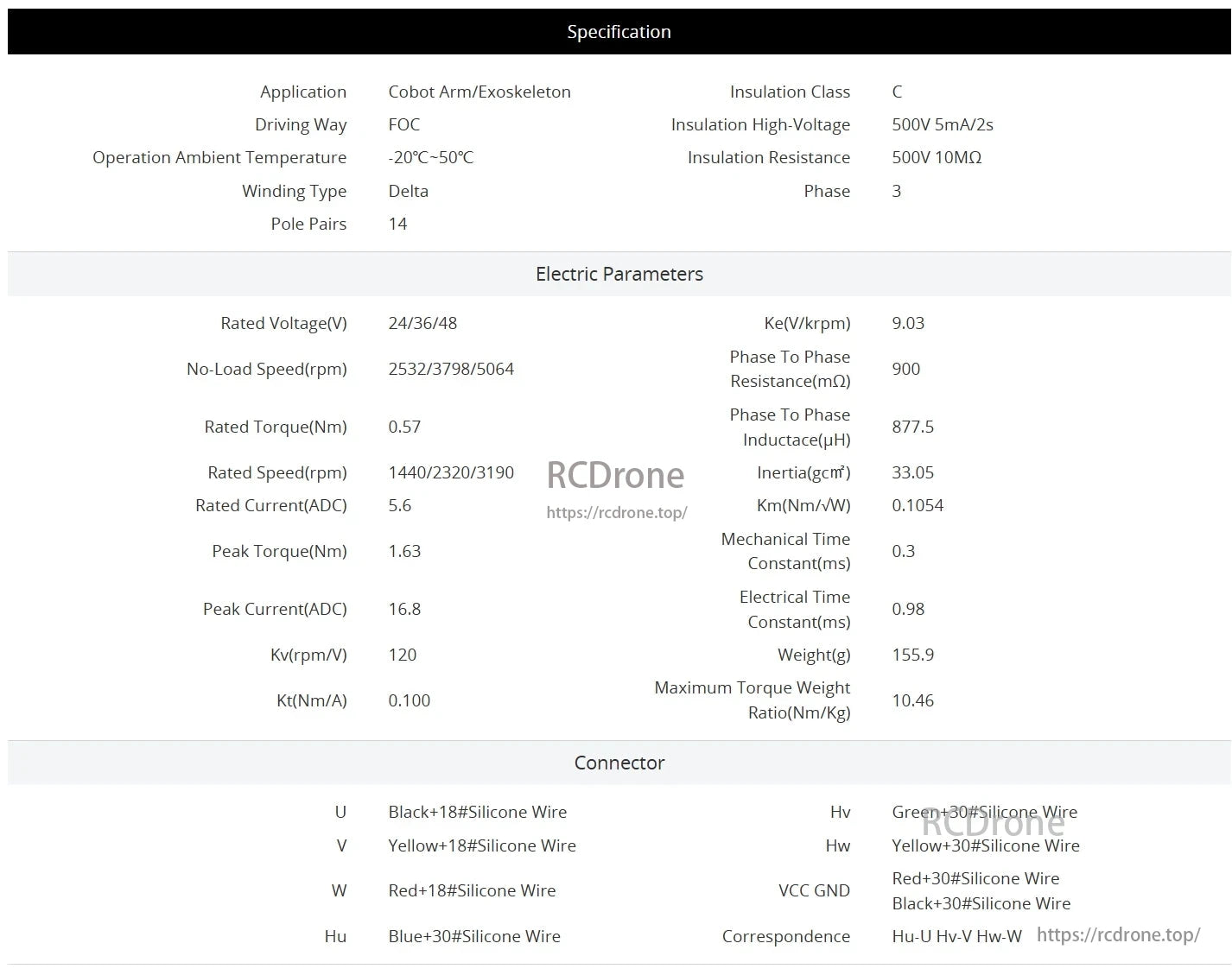
Мотор CubeMars RI60: застосування в роботизованих руках/екзоскелетах, FOC управління, робоча температура -20°C-50°C, 14 пар полюсів. Номінальна напруга 24/36/48V, швидкість без навантаження 2532/3798/5064 об/хв, номінальний момент 0.57Nm, піковий момент 1.63Nm.
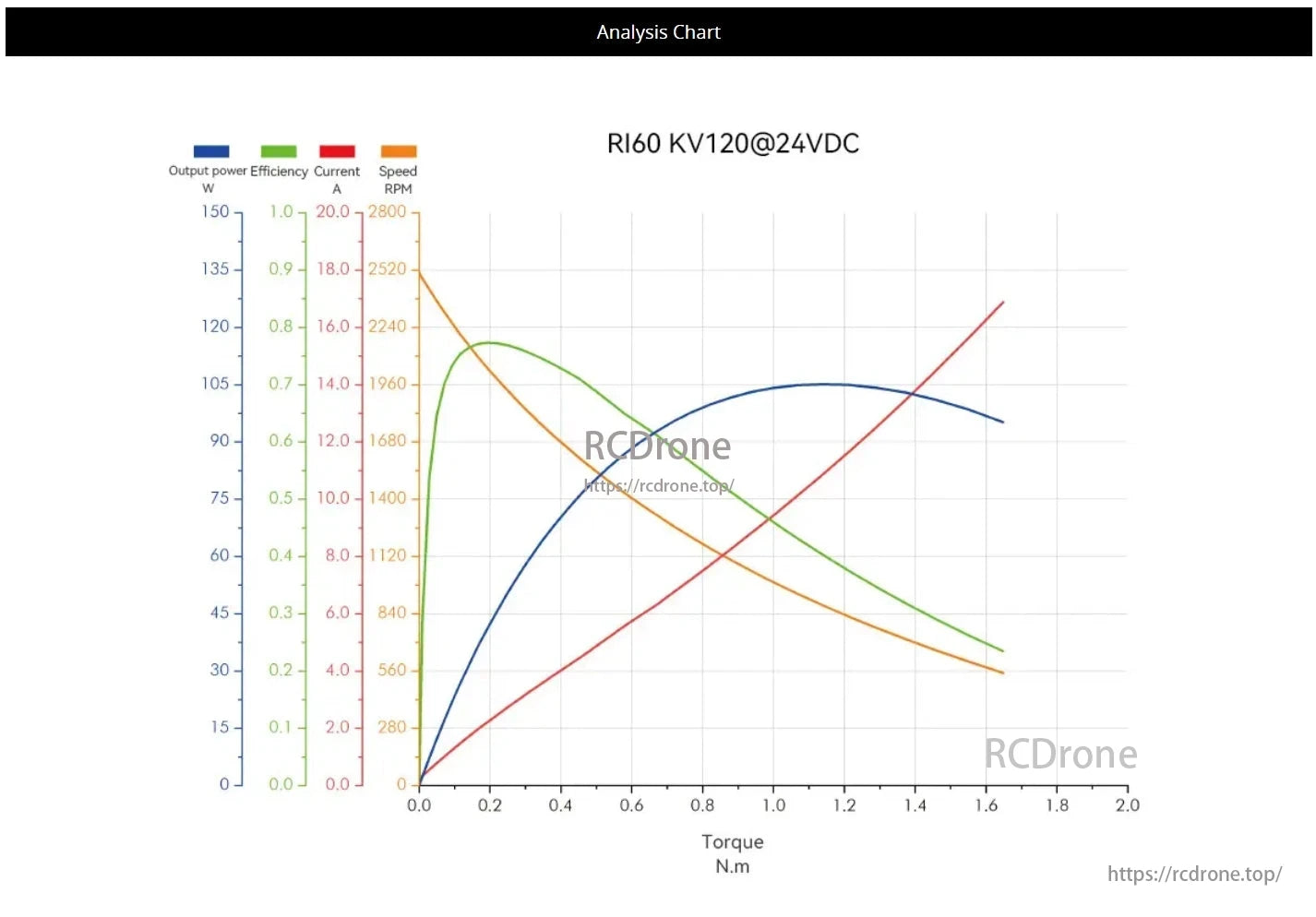
Графік аналізу мотора CubeMars RI60 на KV120@24VDC. Dispпоказує вихідну потужність, ефективність, струм та швидкість в залежності від моменту. Ефективність досягає піку близько 0.2 N.m, при цьому швидкість зменшується з ростом моменту.
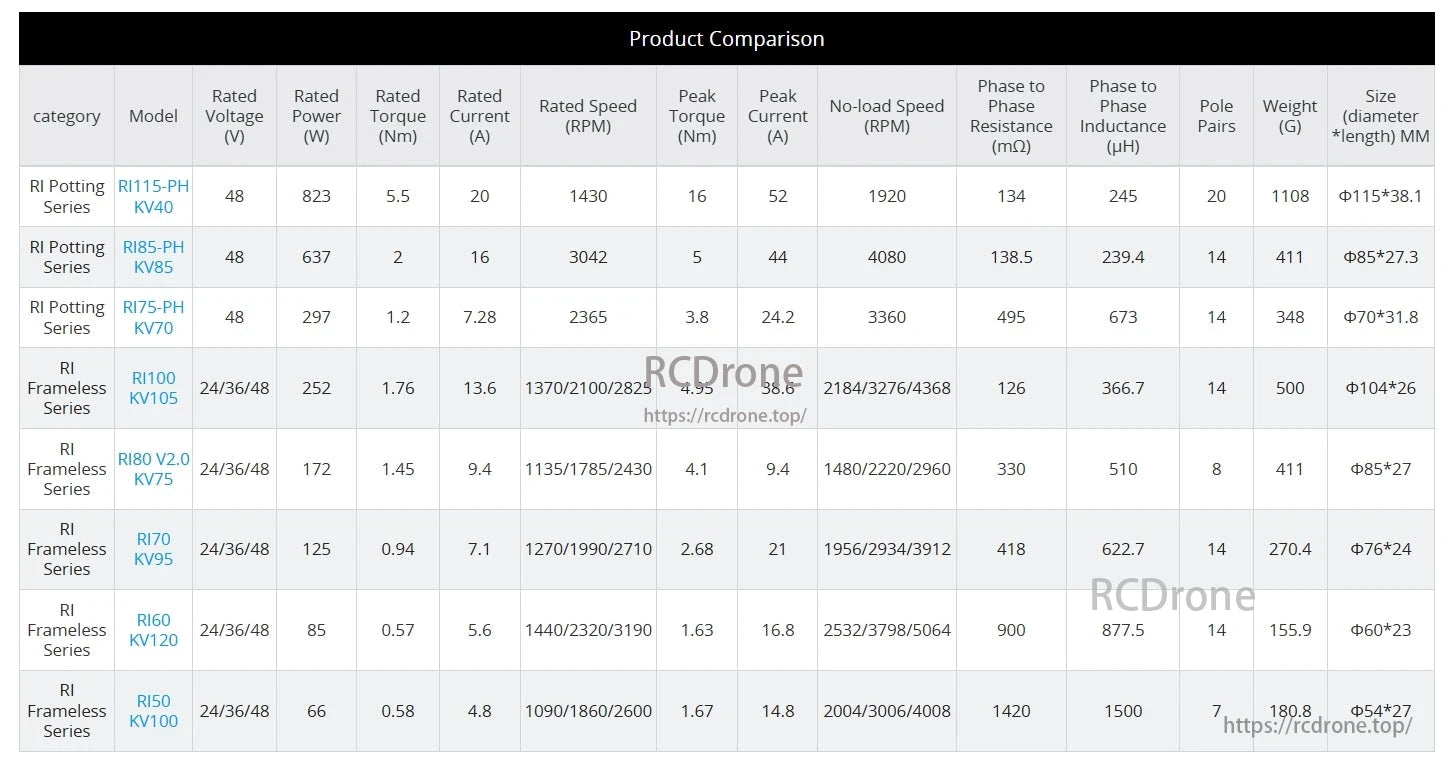
Мотор CubeMars RI60 KV120: 24/36/48V, 85W, момент 0.57Nm, струм 5.6A, швидкість 1440/2320/3190 об/хв, піковий момент 1.63Nm, піковий струм 16.8A, опір 900mΩ, індуктивність 877.5µH, 14 пар полюсів, вага 155.9g, розмір φ60*23мм.

CubeMars RI60 Мотор: Нижчий крутний момент, плавний хід, низький рівень шуму, сильна динаміка.

Ручна обмотка статора з зазором 0,5 мм для оптимальної продуктивності.

Згнутий постійний магніт для дизайну мотора BEMF Sinus, що забезпечує легке управління.

RI60 Ротор Підвищеної Версії. Загальна висота збільшена на 2 мм для кращого сприйняття датчиком Холла.
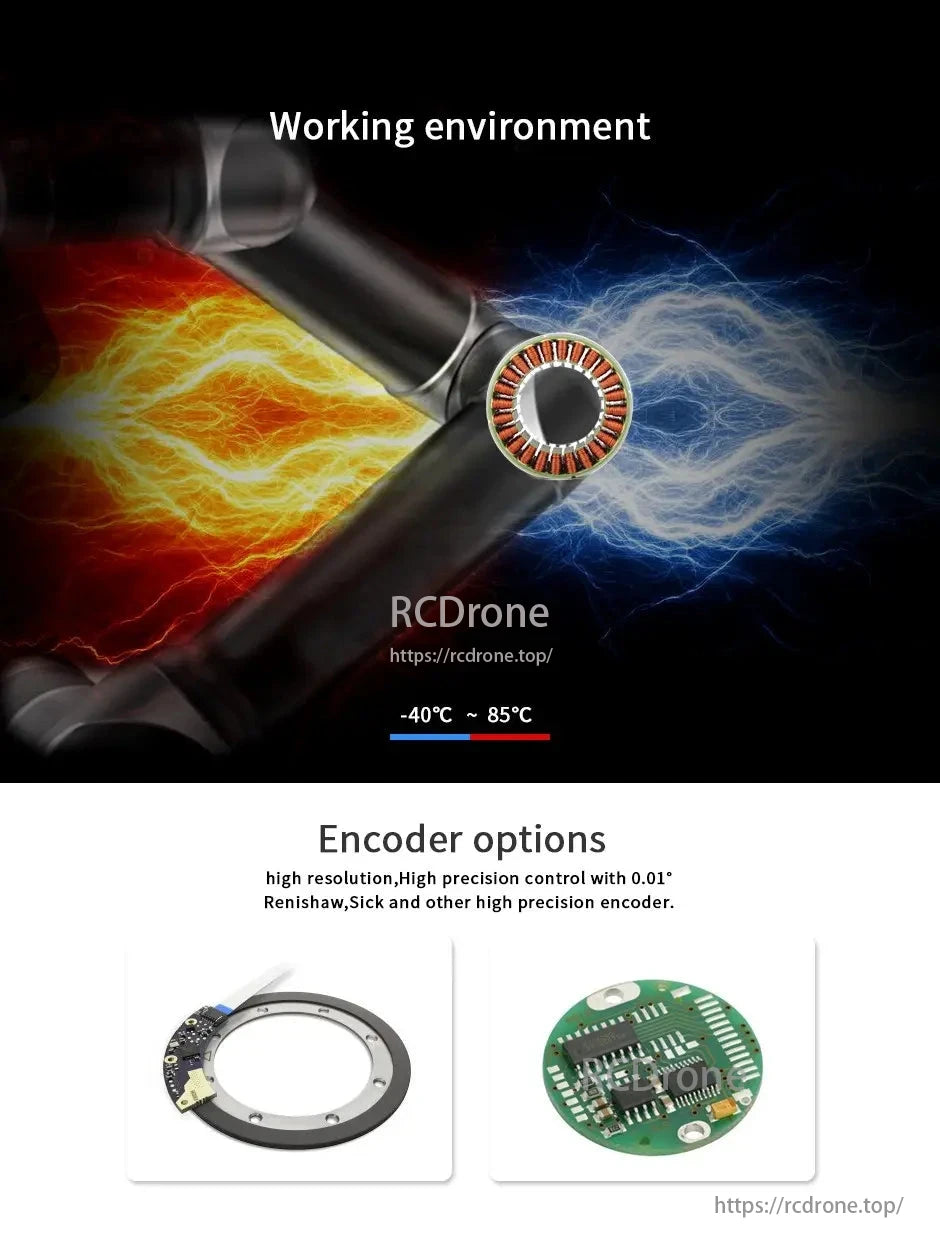
CubeMars RI60 Мотор: -40°C до 85°C, варіанти високоякісних енкодерів.
Related Collections




