




Модуль DFRobot SEN0142 MPU6050 6 DOF гіроскоп-акселерометр IMU з I2C цифровим процесором руху для Arduino & Робототехніка
Модуль DFRobot SEN0142 MPU6050 6 DOF гіроскоп-акселерометр IMU з I2C цифровим процесором руху для Arduino & Робототехніка
DFRobot
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
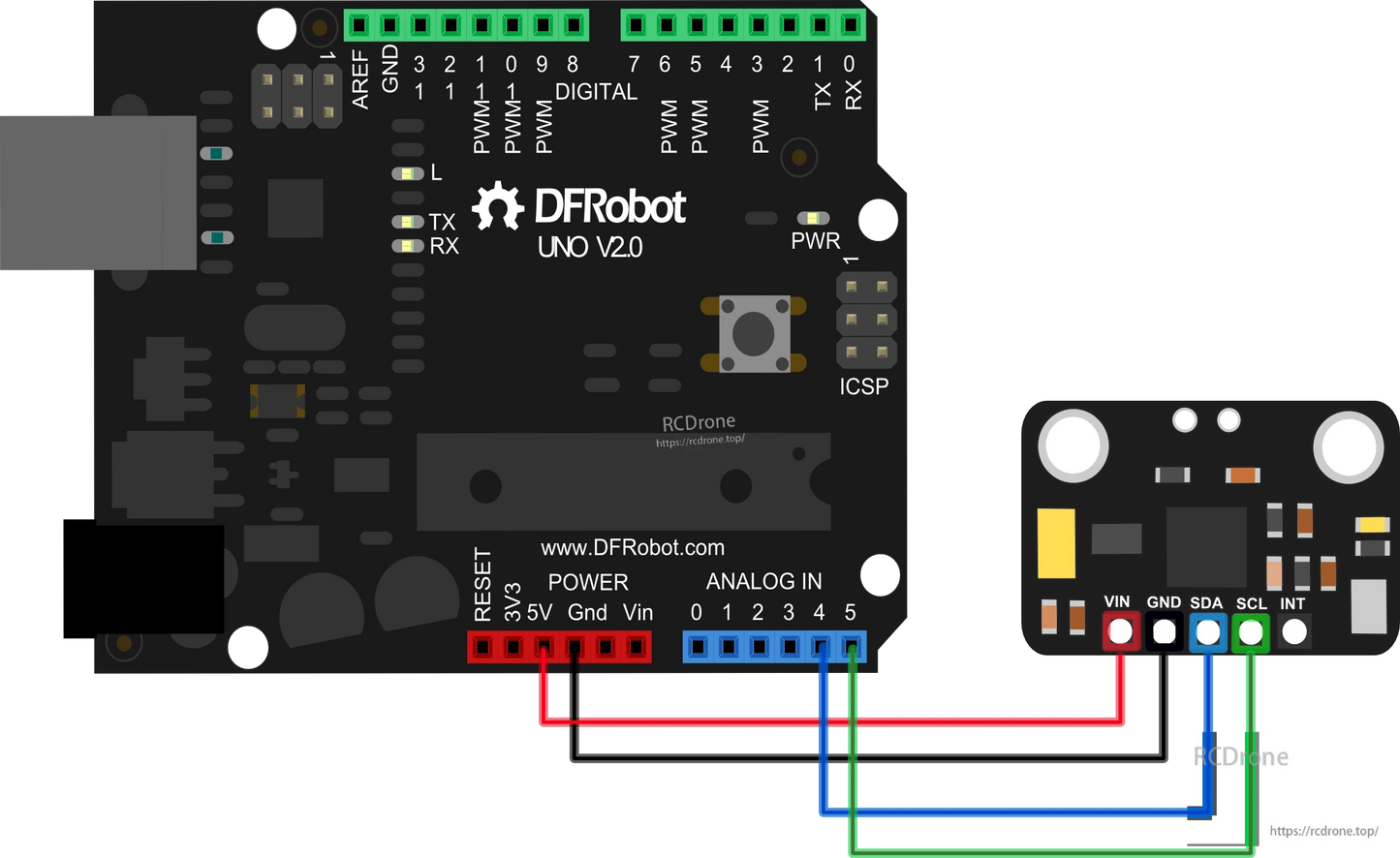
Модуль DFRobot SEN0142 MPU6050 6 DOF IMU інтегрує 3-осевий гіроскоп та 3-осевий акселерометр на одному чіпі, забезпечуючи точне виявлення руху для робототехніки, дронів, носимих пристроїв та проектів на базі Arduino. Завдяки Цифровому процесору руху (DMP), він підтримує розширені алгоритми MotionFusion на 6 осей та 9 осей, що дозволяє отримувати вихідні дані у вигляді кватерніонів, кутів Ейлера та сирих даних з сенсорів. З широким діапазоном вхідної напруги 3V–5V, MPU6050 можна безпосередньо підключити до Arduino та інших мікроконтролерів для відстеження руху в реальному часі та виявлення жестів.
Ключові особливості
-
Поєднує 3-осевий гіроскоп та 3-осевий акселерометр в одному чіпі
-
Програмований діапазон акселерометра: ±2g, ±4g, ±8g, ±16g
-
Чутливість гіроскопа: ±250, ±500, ±1000, ±2000 dps
-
Цифровий процесор руху (DMP) для вбудованої MotionFusion та розпізнавання жестів
-
I2C цифровий інтерфейс підтримує матричний, кватерніонний, Ейлеровий та сирі формати даних
-
Вбудована калібровка &посилювача та компаса для покращення точності
-
Сумісний з Arduino та носимою електронікою через I2Cdevlib
Специфікації
-
Робоча напруга: 3–5 V
Вихід: I2C цифрові (дані MotionFusion 6/9-осей)
-
Акселерометр: ±2g / ±4g / ±8g / ±16g програмований діапазон
-
Гіроскоп: ±250 / ±500 / ±1000 / ±2000 dps чутливість
-
Формат даних: Матриця обертання, кватерніон, кути Ейлера, сирі дані
-
Розміри: 14 × 21 мм
Застосування
-
Сенсори руху в робототехніці
-
Arduino &та DIY електронні проекти
-
Взаємодія людини з комп'ютером (HCI)
-
Носимі пристрої та управління жестами
-
Навігаційні та балансувальні системи (e.g., Транспортні засоби типу Segway)
-
Стабілізація дронів та відстеження руху
Деталі



Приклад коду
Будь ласка, спочатку завантажте бібліотеки для всіх IMU сенсорів!




- Вибір вибору призводить до повного оновлення сторінки.
- Відкриється в новому вікні.