Контролер польоту з автопілотом Holybro Pixhawk 4
Контролер польоту з автопілотом Holybro Pixhawk 4
HolyBro
Не вдалося завантажити інформацію про можливість самовивозу
Pixhawk® 4 оснащений передовою процесорною технологією від STMicroelectronics®, сенсорною технологією від Bosch®, InvenSense® та операційною системою реального часу NuttX, що забезпечує неймовірну продуктивність, гнучкість і надійність для керування будь-яким автономним транспортним засобом. .
Мікроконтролер Pixhawk 4 має 2 МБ флеш-пам'яті та 512 КБ RAM. Завдяки збільшеній потужності та ресурсам оперативної пам’яті розробники можуть продуктивніше та ефективніше працювати над розробкою. На автопілоті можуть бути реалізовані більш складні алгоритми та моделі.
Високопродуктивні IMU з низьким рівнем шуму призначені для стабілізації. Сигнали готовності до даних від усіх датчиків направляються на окремі контакти переривань і захоплення таймерів на автопілоті, що дозволяє точне відмітку часу даних датчиків. Нова конструкція віброізоляції забезпечує точніші зчитування, дозволяючи автомобілям досягати кращих загальних характеристик польоту.
Дві зовнішні шини SPI та шість пов’язаних ліній вибору мікросхем дозволяють додавати додаткові датчики та корисне навантаження з інтерфейсом SPI. Загалом є чотири шини I2C, дві призначені для зовнішнього використання, а дві згруповані з послідовними портами для модулів GPS/Compass.
Примітка:
- Потрібен M10 GPS PX4 1.14 & ArduPilot 4.3 або новіша версія.
- Порівняльна таблиця силового модуля
Технічні характеристики
- Основний процесор FMU
- STM32F765 - 32 Bit Arm ® Cortex® -M7, 216 МГц, 2 МБ пам'яті, 512 КБ RAM
- STM32F765 - 32 Bit Arm ® Cortex® -M7, 216 МГц, 2 МБ пам'яті, 512 КБ RAM
- IO процесор
- STM32F103 - 32-бітний Arm® Cortex®-M3, 72 МГц, 64 КБ SRAM (поточний)
- STM32F100 - 32 Bit Arm ® Cortex® -M3, 24 МГц, 8 КБ SRAM (знято з виробництва)
- Бортові датчики
- Розгін/гіроскоп: ICM-20689
- Розгін/гіроскоп: BMI055/ICM-20602
- Маг.: IST8310
- Барометр: MS5611
- Розгін/гіроскоп: ICM-20689
Електричні дані
- Вихід модуля живлення: 4,9~5,5 В
- Максимальна вхідна напруга: 6В
- Максимальний струм вимірювання: 120A
- Вхід живлення USB: 4,75~5,25 В
- Вхід сервоприводу: 0~36 В
- Робоча температура: -25-85°C
Механічні дані
- Розміри: 44x84x12 мм
- Вага (пластиковий корпус): 33.3g
- Вага (алюмінієвий корпус): 49 г
Завантаження:
Артикул 11032/11035 Включає:
- Контролер польоту Pixhawk 4 (пластик або алюміній)
- Набір кабелів
Артикул 20045/20046/20114/20115 Включає:
- Контролер польоту Pixhawk 4 (Пластмаса або Алюміній)
- Модуль живлення: PM02 V3 12S/PM07 14S
- Набір кабелів
Артикул 20139/20140/20141/20142/20269/20270/20271/20272 Включає:
- Контролер польоту Pixhawk 4
- Модуль живлення: PM02 V3 12S/PM07 14S
- GPS: M9N/M10
- Набір кабелів

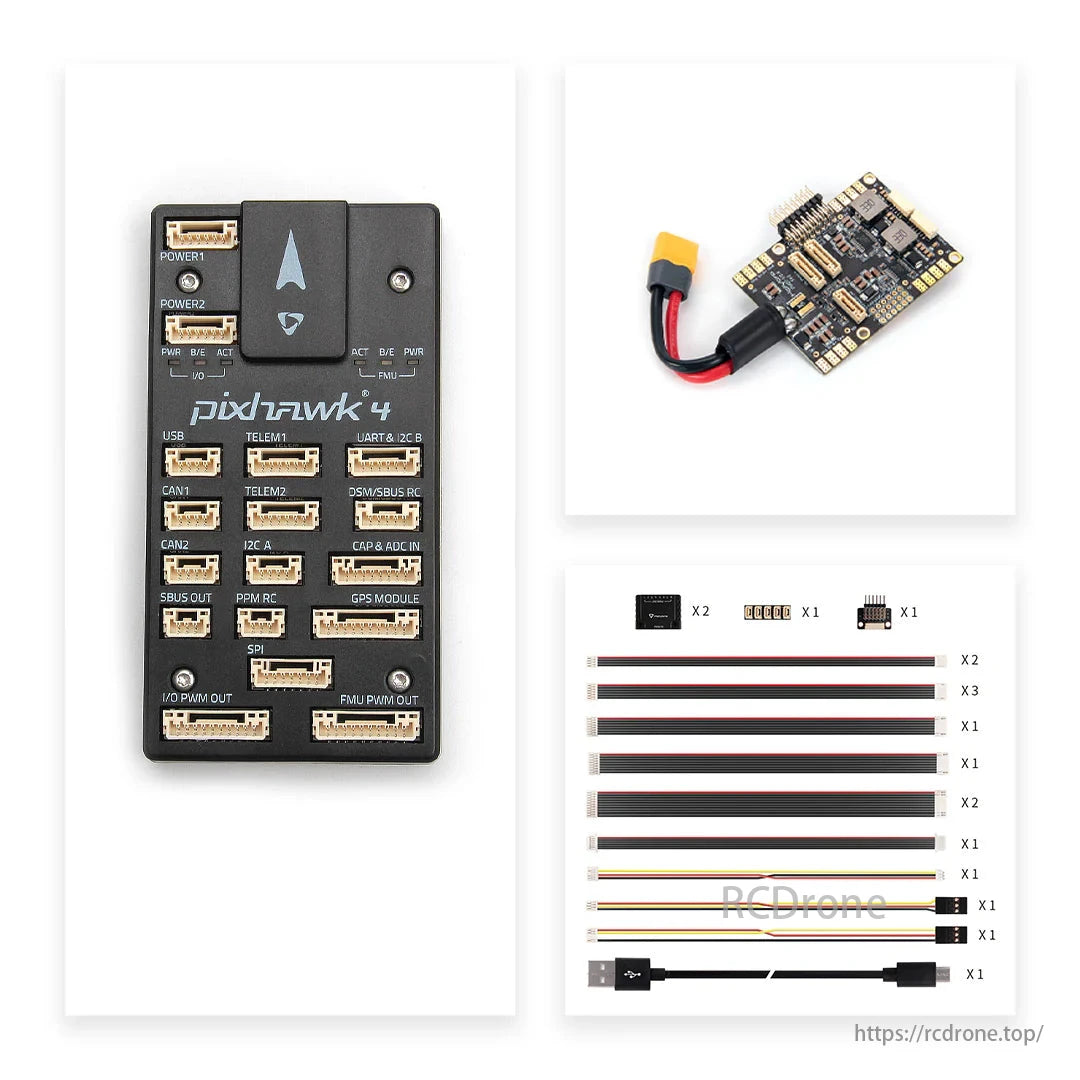
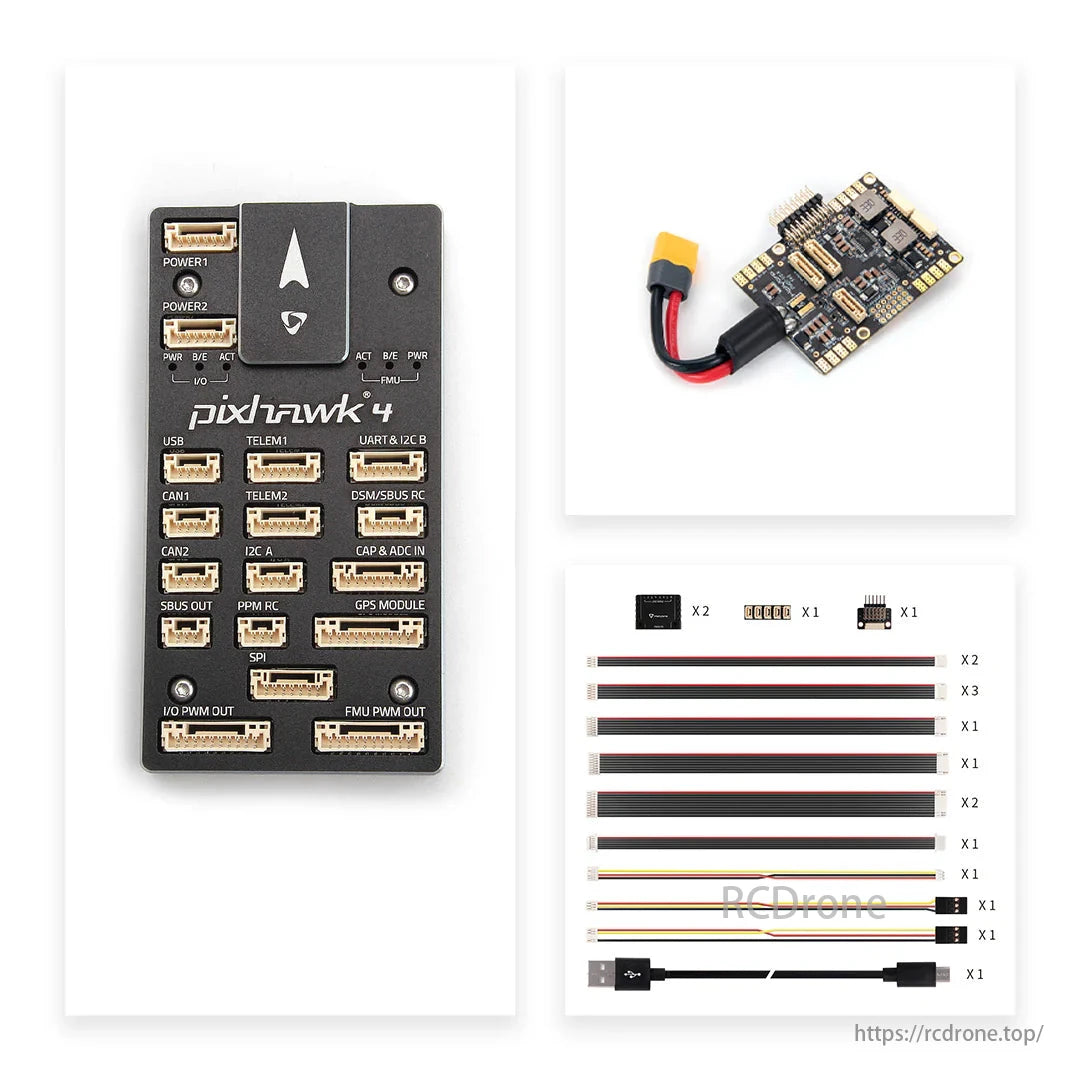
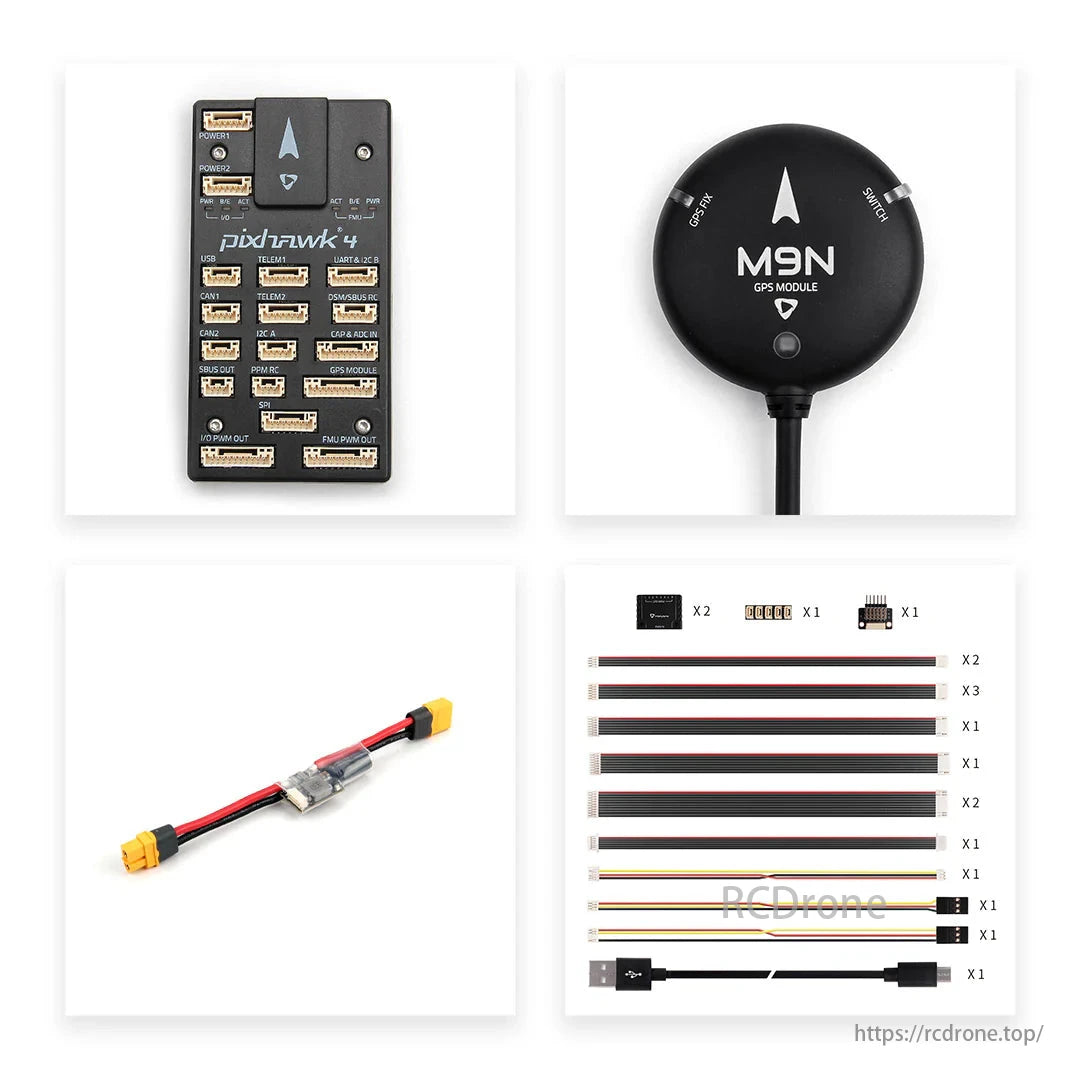
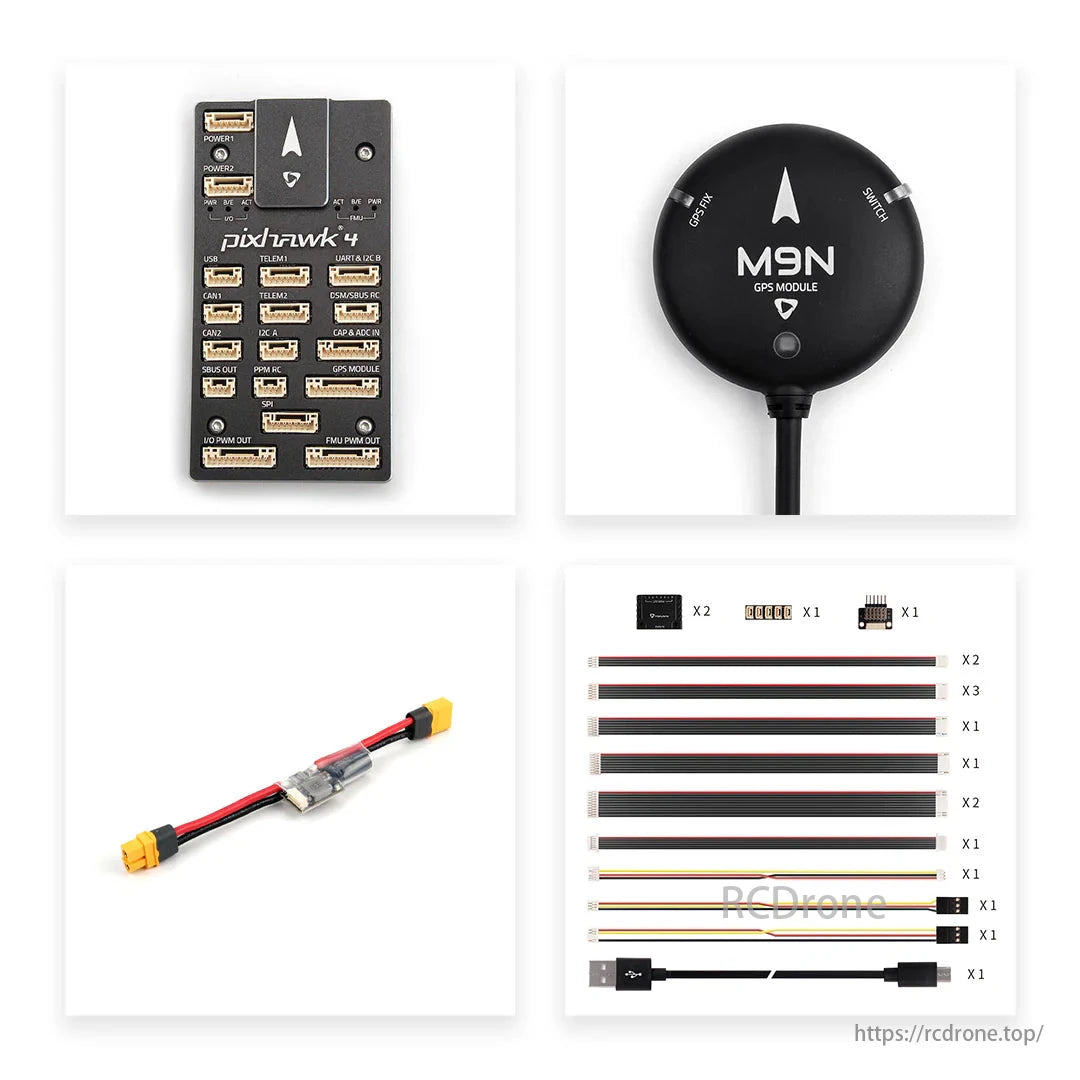
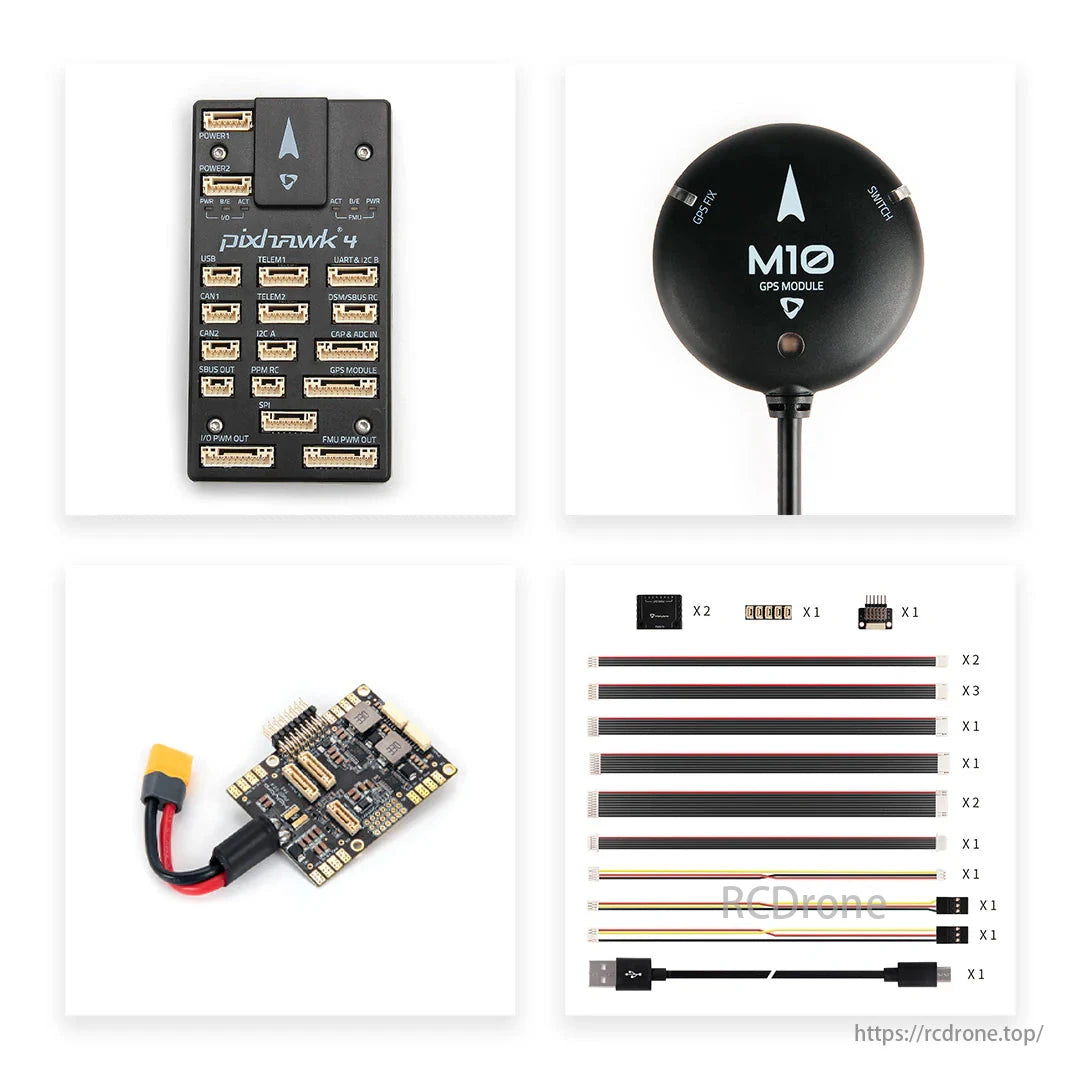
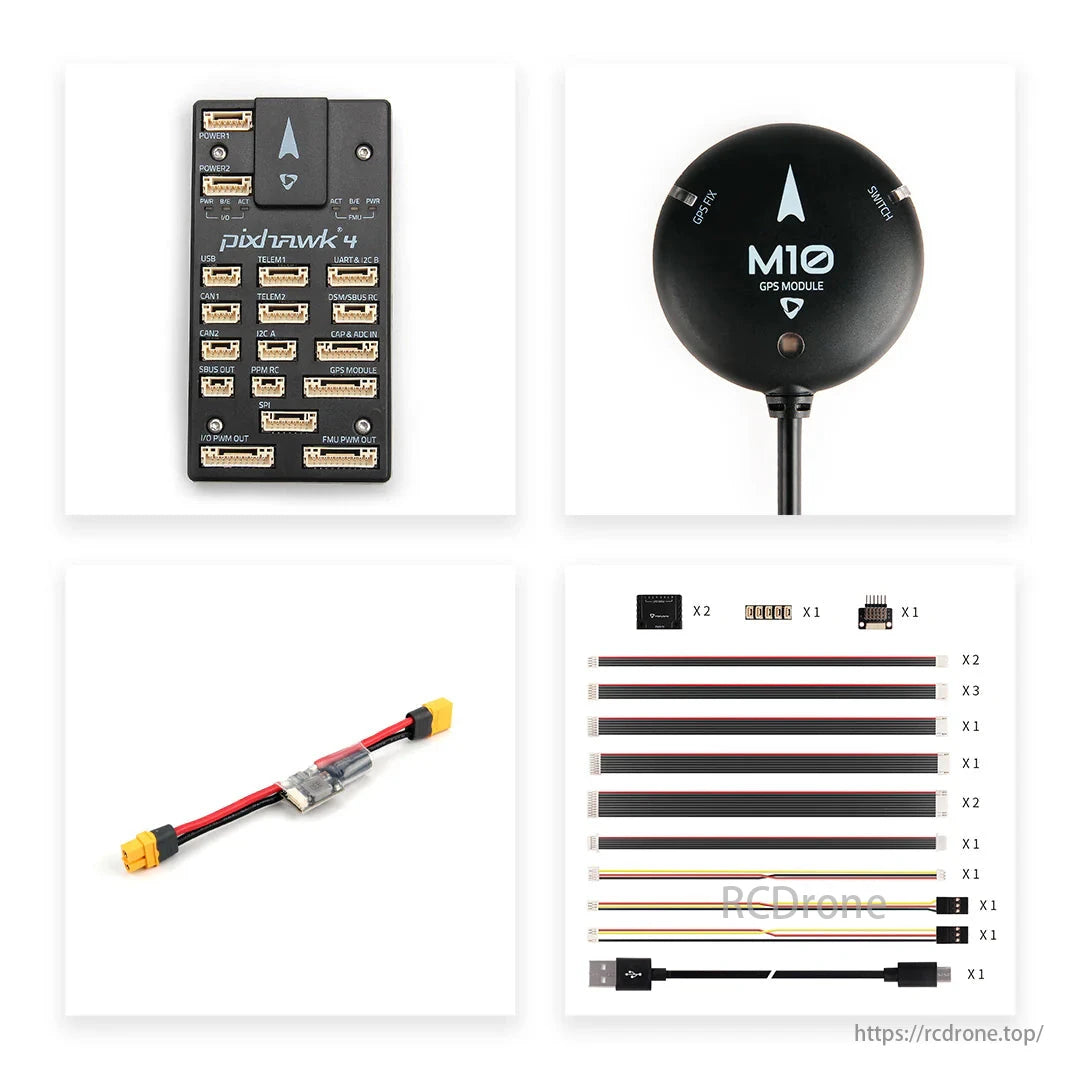
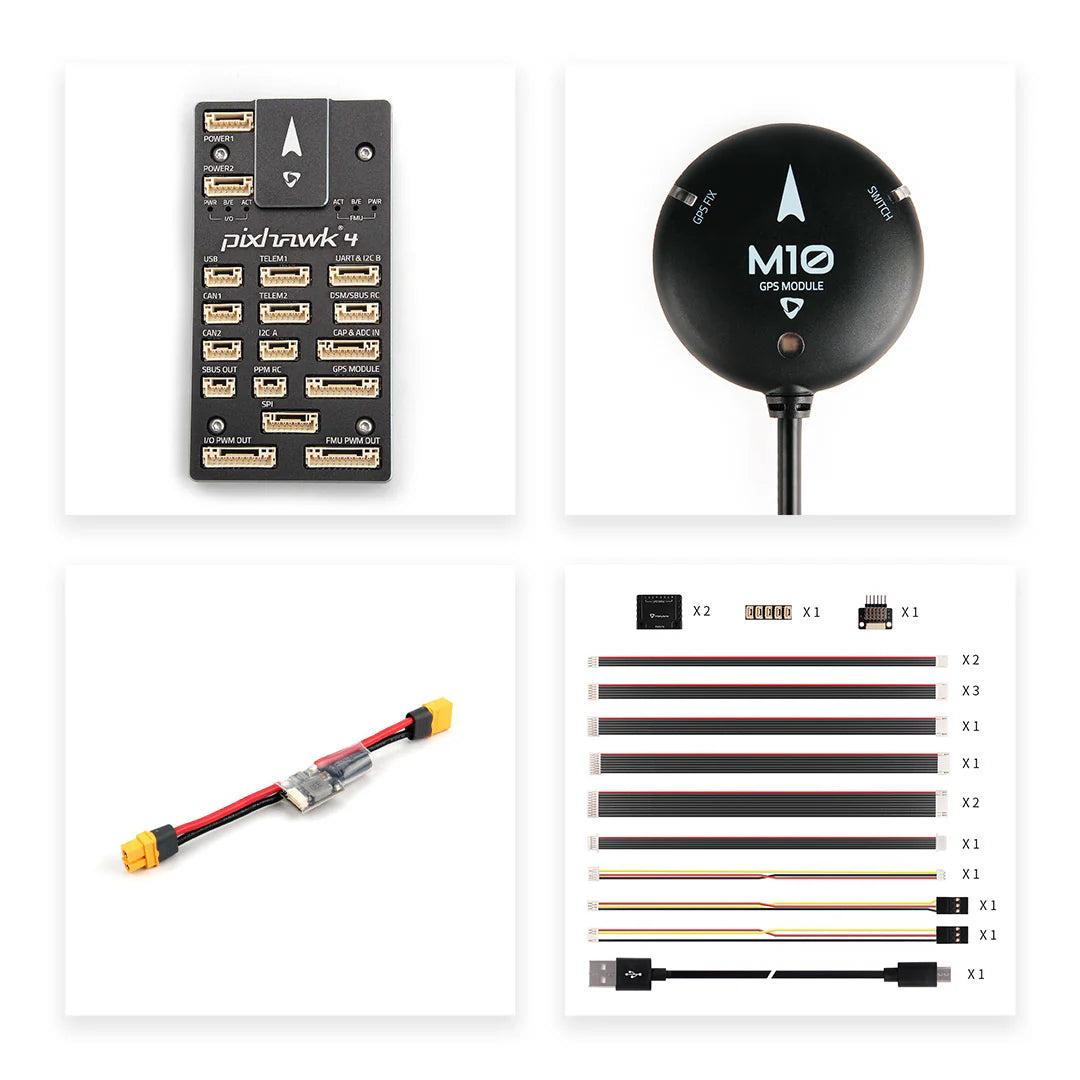
Контролер польоту Pixhawk 4 з різними портами, включаючи USB, CAN, TELEM, UART, I2C, SBUS OUT, PPM RC, SPI та GPS MODULE.

Контролер польоту Pixhawk, оснащений системою автопілота PX4.

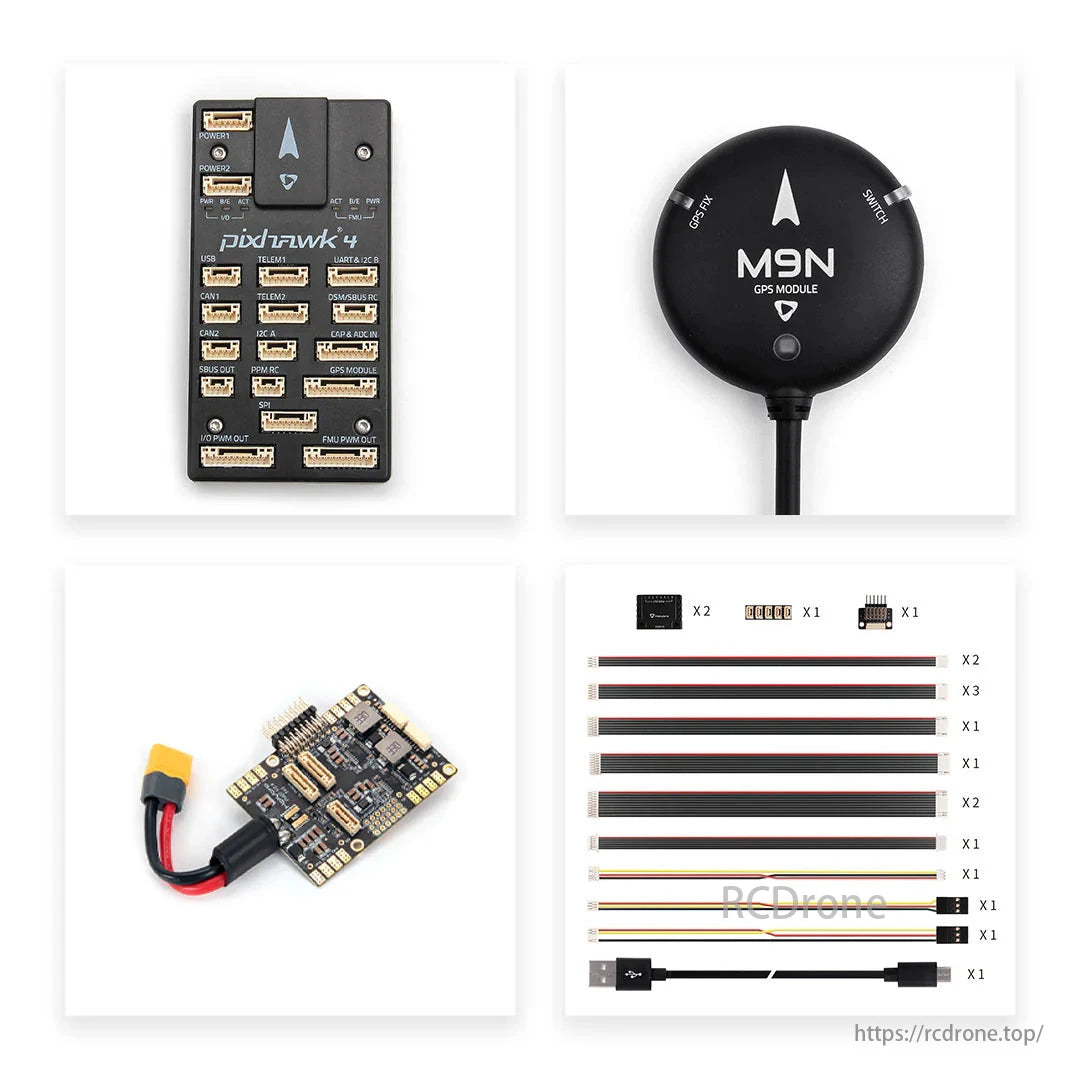
Контролер польоту Pixhawk 4, модуль GPS M9N, модуль живлення з роз'ємом XT60 і різні кабелі для збірки RC дрона.

Контролер польоту Pixhawk 4 з різними портами, включаючи USB, CAN і модуль GPS. Включає модуль живлення та кілька кабелів для підключення.

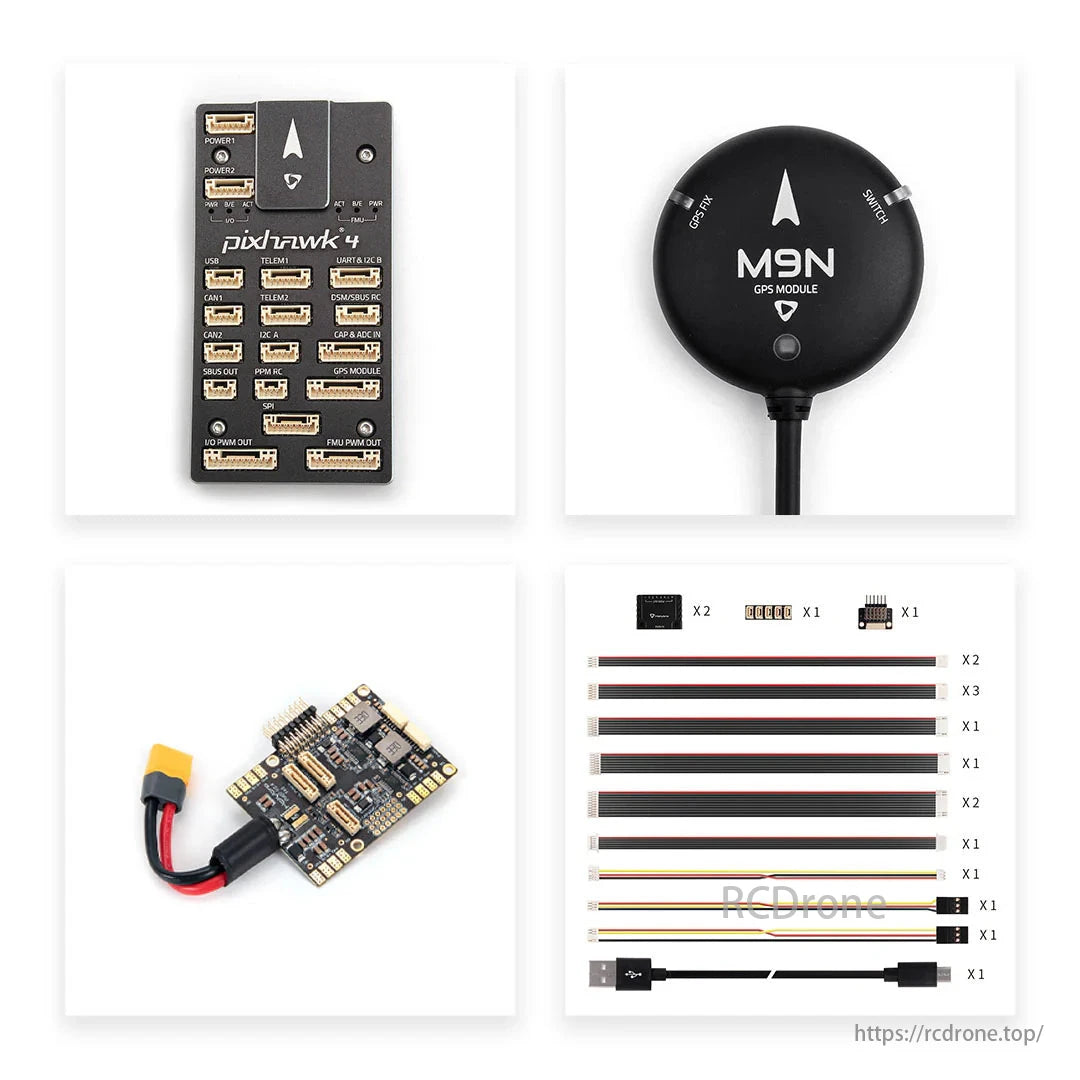
Контролер польоту Pixhawk 4, модуль GPS M9N, модуль живлення з роз'ємом XT60 і різні кабелі для підключення.
Related Collections