Контролер польоту з автопілотом Holybro Pixhawk 5X
Контролер польоту з автопілотом Holybro Pixhawk 5X
HolyBro
Не вдалося завантажити інформацію про можливість самовивозу
Pixhawk® 5X — це останнє оновлення успішного сімейства Pixhawk® контролери польоту на основі відкритого стандарту Pixhawk® FMUv5X і стандарту Pixhawk® Autopilot Bus. Він поставляється з попередньо встановленою найновішою версією PX4 Autopilot®, потрійним резервуванням, контрольованою температурою, ізольованим датчиком, що забезпечує неймовірну продуктивність і надійність.
Всередині Pixhawk® 5X ви можете знайти STM32F7 на базі STMicroelectronics® у поєднанні з сенсорною технологією від Bosch®, InvenSense®, що дає вам гнучкість і надійність для керування будь-яким автономним транспортним засобом, придатним як для академічних, так і для комерційних застосувань. . Мікроконтролер F7 Pixhawk® 5X має 2 МБ флеш-пам’яті та 512 КБ RAM. Автопілот PX4 використовує переваги збільшеної потужності та оперативної пам’яті. Завдяки оновленій обчислювальній потужності розробники можуть бути більш продуктивними та ефективними у своїй роботі над розробкою, дозволяючи створювати складні алгоритми та моделі.
Відкритий стандарт FMUv5X включає в себе високопродуктивні IMU з низьким рівнем шуму, призначені для кращої стабілізації. Потрійний резервований IMU та подвійний резервований барометр на окремих шинах. Коли автопілот PX4 виявляє збій датчика, система плавно перемикається на інший, щоб підтримувати надійність керування польотом.
Незалежний LDO живить кожен набір датчиків із незалежним керуванням потужністю. Нова конструкція віброізоляції для фільтрації високочастотної вібрації та зменшення шуму для забезпечення точних показань, що дозволяє транспортним засобам досягати кращих загальних характеристик польоту. Зовнішня шина датчиків (SPI5) має дві лінії вибору мікросхеми та сигнали готовності даних для додаткових датчиків і корисного навантаження з інтерфейсом SPI, а також із вбудованим Microchip Ethernet PHY (LAN8742AI-CZ-TR), високошвидкісним зв’язком з комп’ютерами місії через Ethernet тепер підтримується. Два розумних порти моніторингу батареї (SMBus), підтримка модуля живлення INA226 SMBus.
Pixhawk® 5X ідеально підходить для розробників корпоративних дослідницьких лабораторій, стартапів, науковців (дослідників, викладачів, студентів) і комерційних програм. Pixhawk 5X сумісний з обома PX4 Автопілот & Прошивка Ardupilot.
Примітка:
- Для Pixhawk 5X потрібен протокол I2C для даних про напругу та струм від модуля живлення, наприклад PM02D, аналоговий модуль живлення (PM02, PM06, PM07) не сумісні з Pixhawk 5X. Порівняльна таблиця силового модуля
- Він поставляється з прошивкою PX4 за замовчуванням. Користувач також може використовувати мікропрограму Ardupilot, оновивши мікропрограму через Mission Planner або QGroundControl.
Ключові моменти дизайну
- Модульний контролер польоту: розділені IMU, FMU і базова система, з’єднані 100-контактним і 50-контактним роз’ємом Pixhawk® Autopilot Bus, призначені для гнучких і настроюваних систем
- Резервування: 3 датчики IMU та 2 датчики барометра на окремих шинах, що дозволяє паралельно та безперервно працювати навіть у разі апаратного збою
- Домени з потрійним резервуванням: повністю ізольовані домени датчиків з окремими шинами та окремим керуванням живленням
- Система віброізоляції для фільтрації високочастотної вібрації та зменшення шуму для забезпечення точних показань
- Інтерфейс Ethernet для високошвидкісної інтеграції комп'ютера
- Автоматичне калібрування датчика, що усуває різні сигнали та температуру
- Контроль температури IMU здійснюється за допомогою бортових нагрівальних резисторів, що забезпечує оптимальну робочу температуру IMU
Технічна специфікація
- Процесор FMU: STM32F765
- 32-розрядний ARM® Cortex®-M7, 216 МГц, 2 МБ пам’яті, 512 КБ RAM
- Процесор IO: STM32F100
- 32-бітний Arm® Cortex®-M3, 24 МГц, 8 КБ SRAM
- Бортові датчики
- Розгін/гіроскоп: ICM-20649 (з жорстким монтажем)
- Прискорення/гіроскоп: ICM-42688P (м’який монтаж)
- Прискорення/гіроскоп: ICM-20602 або BMI088 (м'який монтаж)
- Магніт: BMM150
- Барометр: 2x BMP388
Електричні дані
- Номінальна напруга:
- Максимальна вхідна напруга: 6В
- Вхід живлення USB: 4,75~5,25 В
- Вхід сервоприводу: 0~36 В
Інтерфейси
- 16- ШІМ серво виходи
- Вхід ПДУ для Spektrum / DSM
- Виділений вхід ПДУ для PPM і S.Bus
- Виділений аналоговий / PWM вхід RSSI і S.Вихід шини
- 4 послідовні порти загального призначення
- 3 з повним контролем потоку
- 1 з окремим обмеженням струму 1A
- 1 з I2C і додатковою лінією GPIO для зовнішнього зчитувача NFC
- 2 порти GPS
- 1 повний GPS плюс порт безпеки
- 1 базовий порт GPS
- 1 порт I2C
- 1 порт Ethernet
- Безтрансформаторні програми
- 100 Мбіт/с
- 1 шина SPI
- 2 лінії вибору мікросхем
- 2 лінії, готові до даних
- 1 лінія SPI SYNC
- 1 лінія скидання SPI
- 2 шини CAN для периферійних пристроїв CAN
- Шина CAN має індивідуальне безшумне керування або керування ESC RX-MUX
- 2 порти живлення з SMBus
- 1 порт AD & IO
- 2 додаткових аналогових входу
- 1 ШІМ/вхід захоплення
- 2 виділені лінії налагодження та GPIO
Механічні дані
- Розміри
- Модуль контролера польоту: 38,8 x 31,8 x 14,6 мм
- Міні-плінтус: 43,4 x 72,8 x 14,2 мм
- Стандартна плінтус v1: 52,4 x 103,4 x 16,7 мм
- Стандартна плінтус v2A: 40,2 x 92,3 x 18,4 мм
- Стандартна плінтус v2B: 40,2 x 98,3 x 16,9 мм
- вага
- Модуль контролера польоту: 23g
- Міні-плінтус: 26.8г
- Стандартна плінтус v1: 51 г
- Стандартна плінтус v2A: 58 г
- Стандартна плінтус v2B: 58 г
Артикул 11045 включає:
- Модуль польотного контролера Pixhawk 5X
SKU 20307/SKU 20320/SKU20310 містить:
- Модуль польотного контролера Pixhawk 6X
- Standard Baseboard v2A/v2B або Mini Baseboard
- Силовий модуль HV PM02D
- Набір кабелів
- Модуль польотного контролера Pixhawk 6X
- Standard Baseboard v2A/v2B або Mini Baseboard
- Силовий модуль HV PM02D
- Набір кабелів
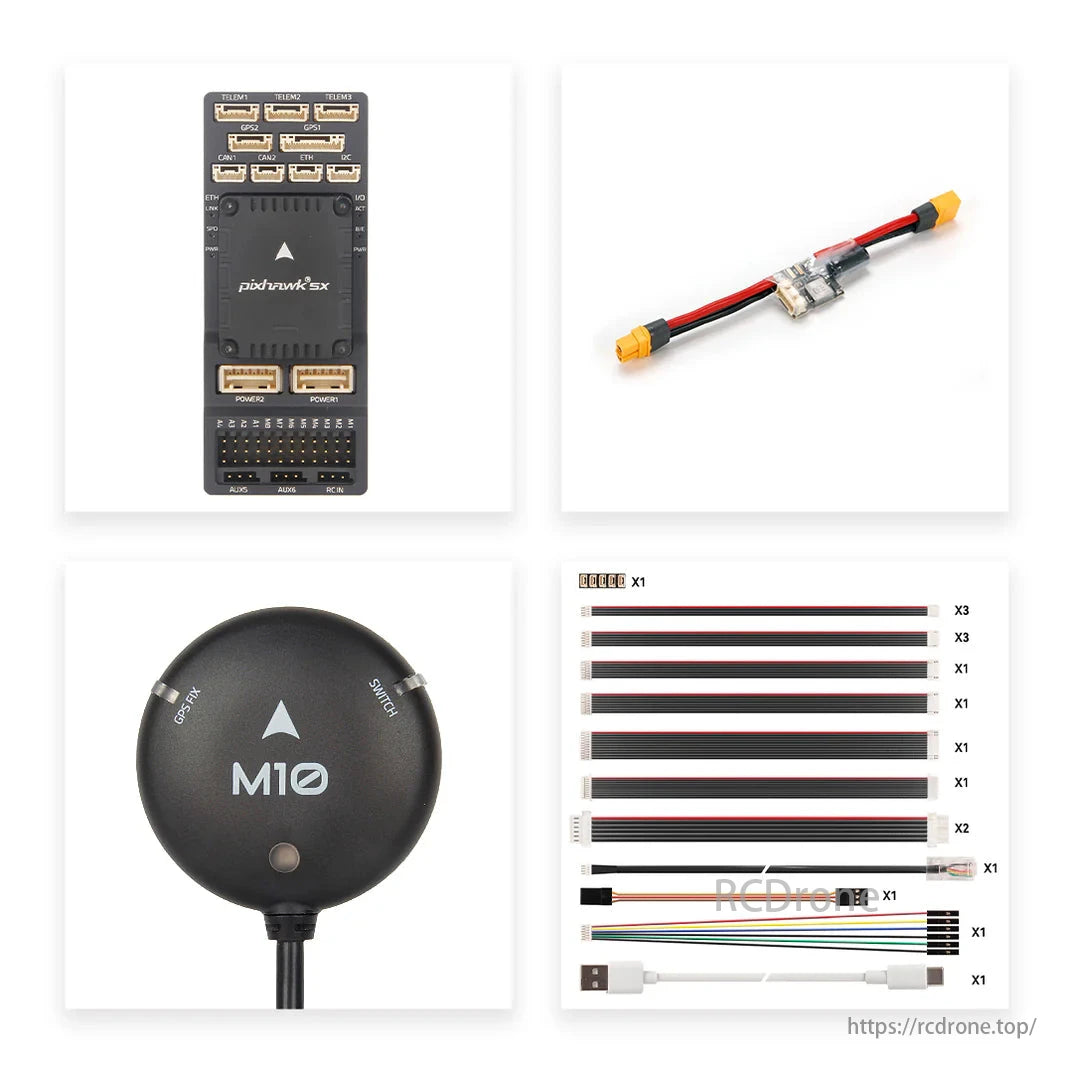
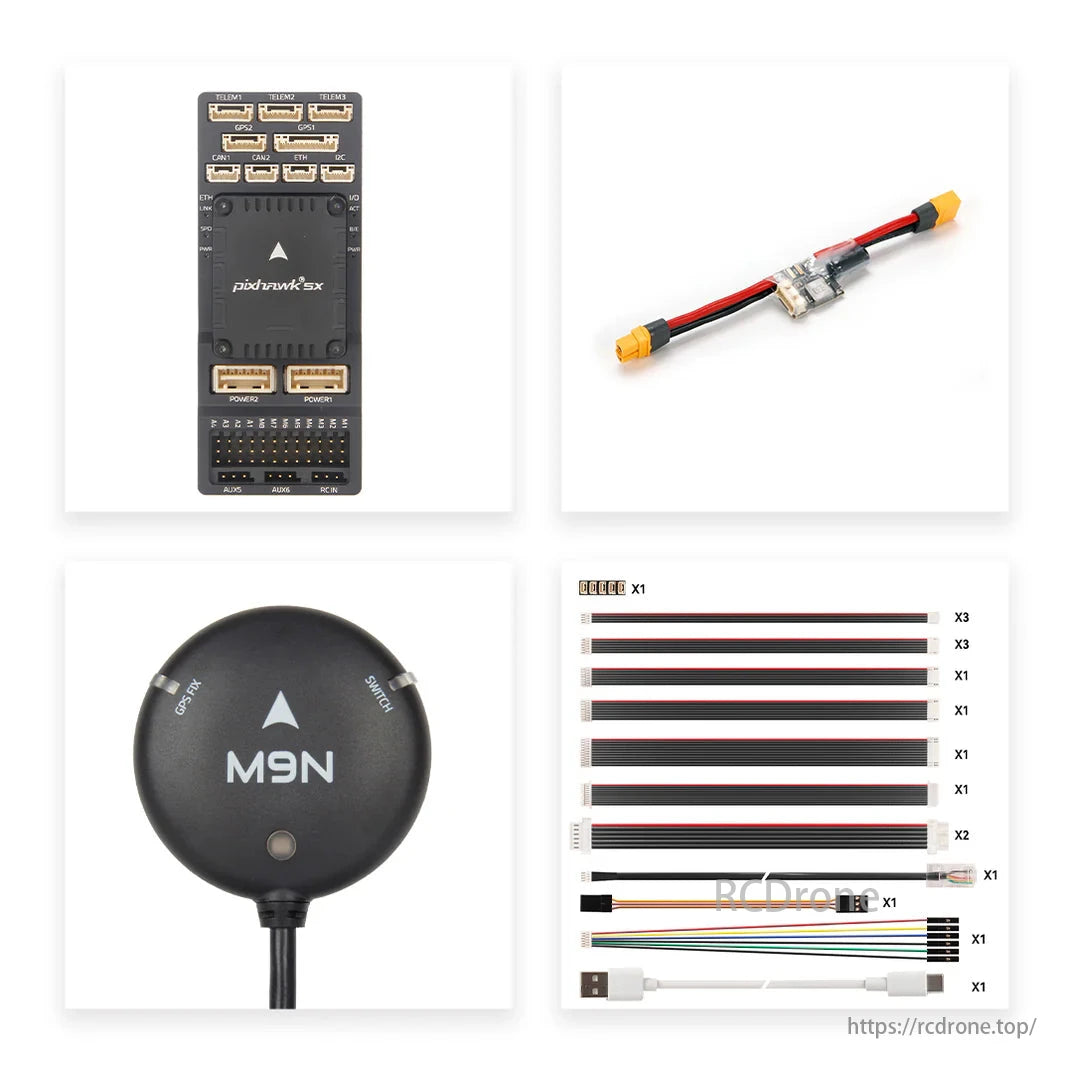
- M9N/M10 GPS
Pixhawk mini, Pixhawk Baseboard v1 і два варіанти Pixhawk Baseboard v2 (v2A та v2B) показані з розмірами. Mini має розміри 43,4 x 72,8 мм, v1 — 52 x 101,90 мм, v2A — 40,2 x 92,3 мм, а v2B — 40,2 x 98,3 мм.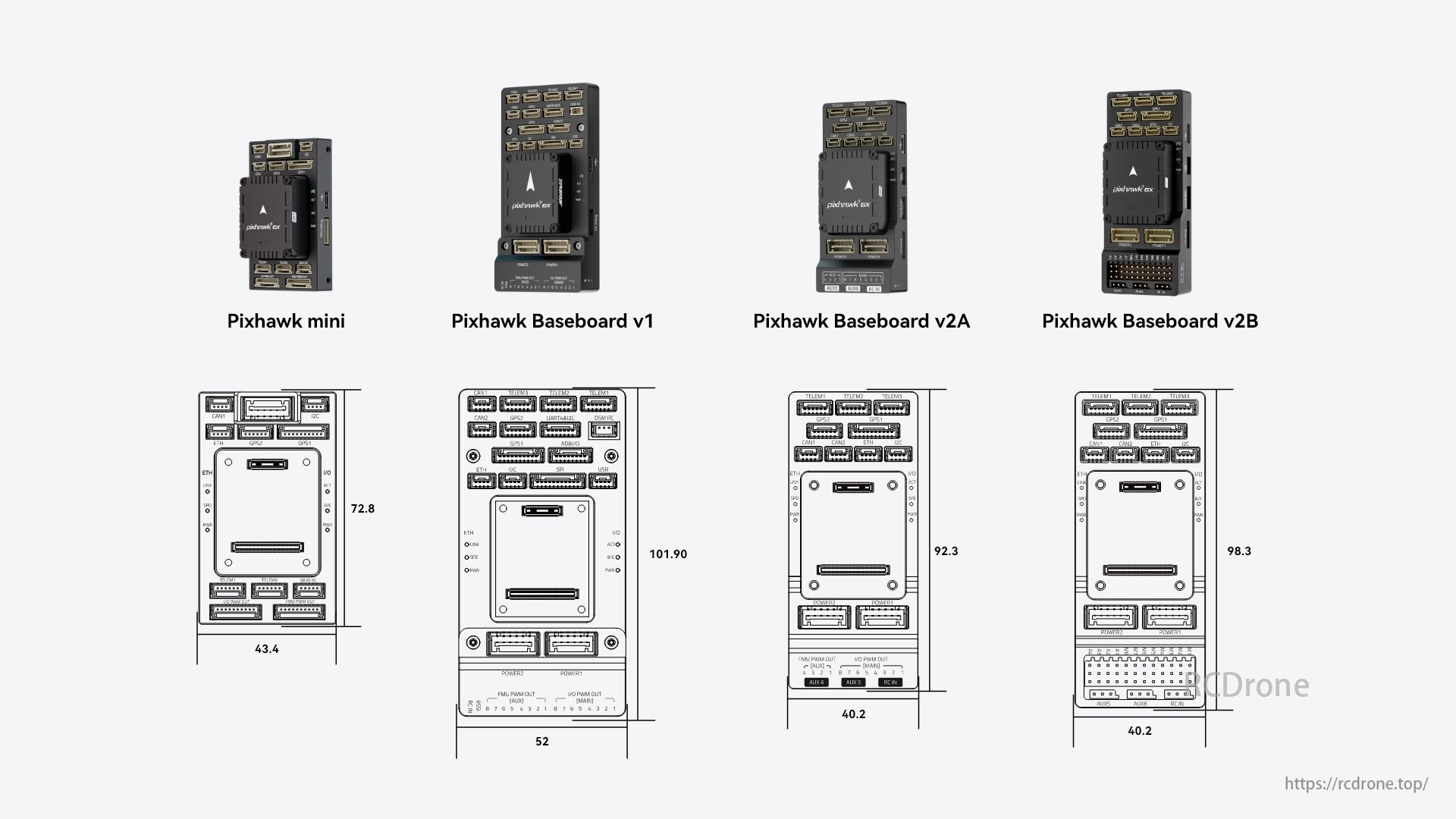
Посібник із зразків електропроводки

Діаграма Holybro Pixhawk 5X включає первинний і вторинний GPS, порти UART4 і I2C, CAN1 і 2, приймач DSM RC, телеметричну радіостанцію, IP-камеру HD FPV, батарею, модуль живлення, ESC і плату розподілу живлення.
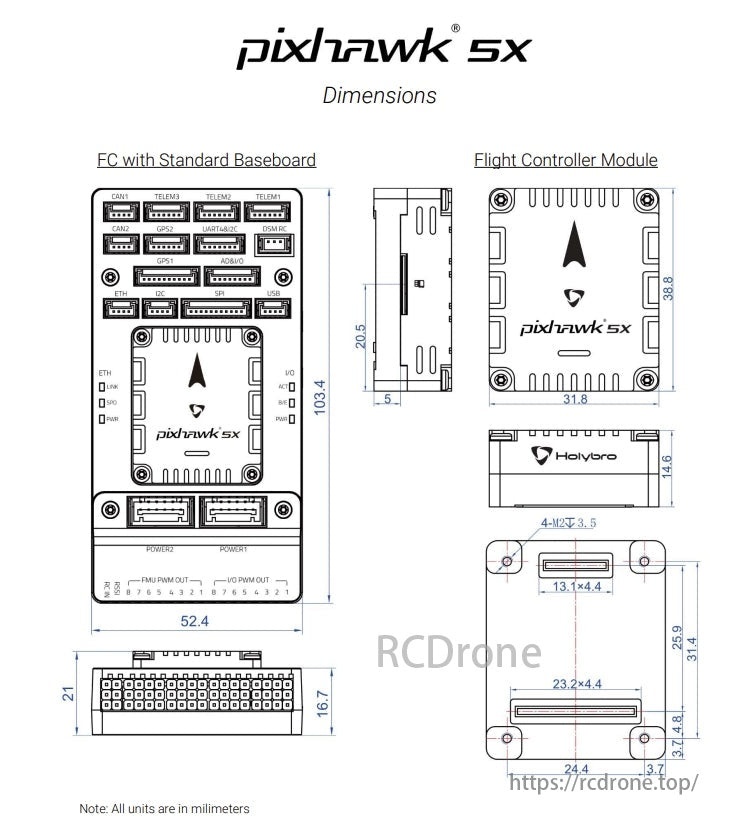
Розміри Pixhawk SX включають модуль польотного контролера та FC зі стандартною цоколем. Модуль має розміри 31,8 x 38,8 мм, а плінтус — 103,4 x 52,4 мм. Усі одиниці в міліметрах.

Стандартні розміри основної плати: 103,4 x 58 x 10,7 мм, з різними портами та роз’ємами, включаючи USB, Ethernet і входи живлення.


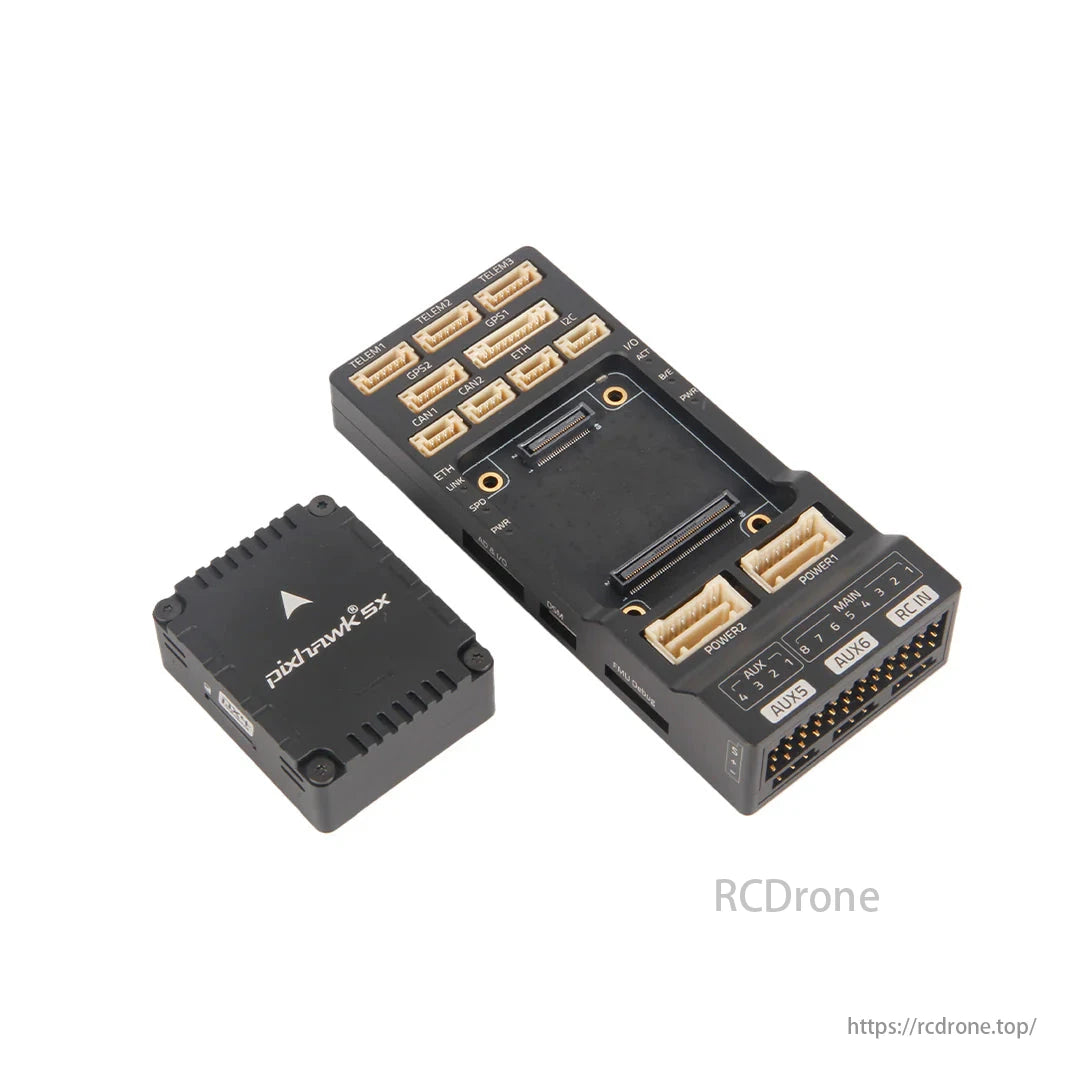
Контролер польоту Pixhawk 5X з портами TELEM1-3, GPS1-2, CAN1-2, ETH, I2C, POWER1-2, AUX5-6 і RC IN.
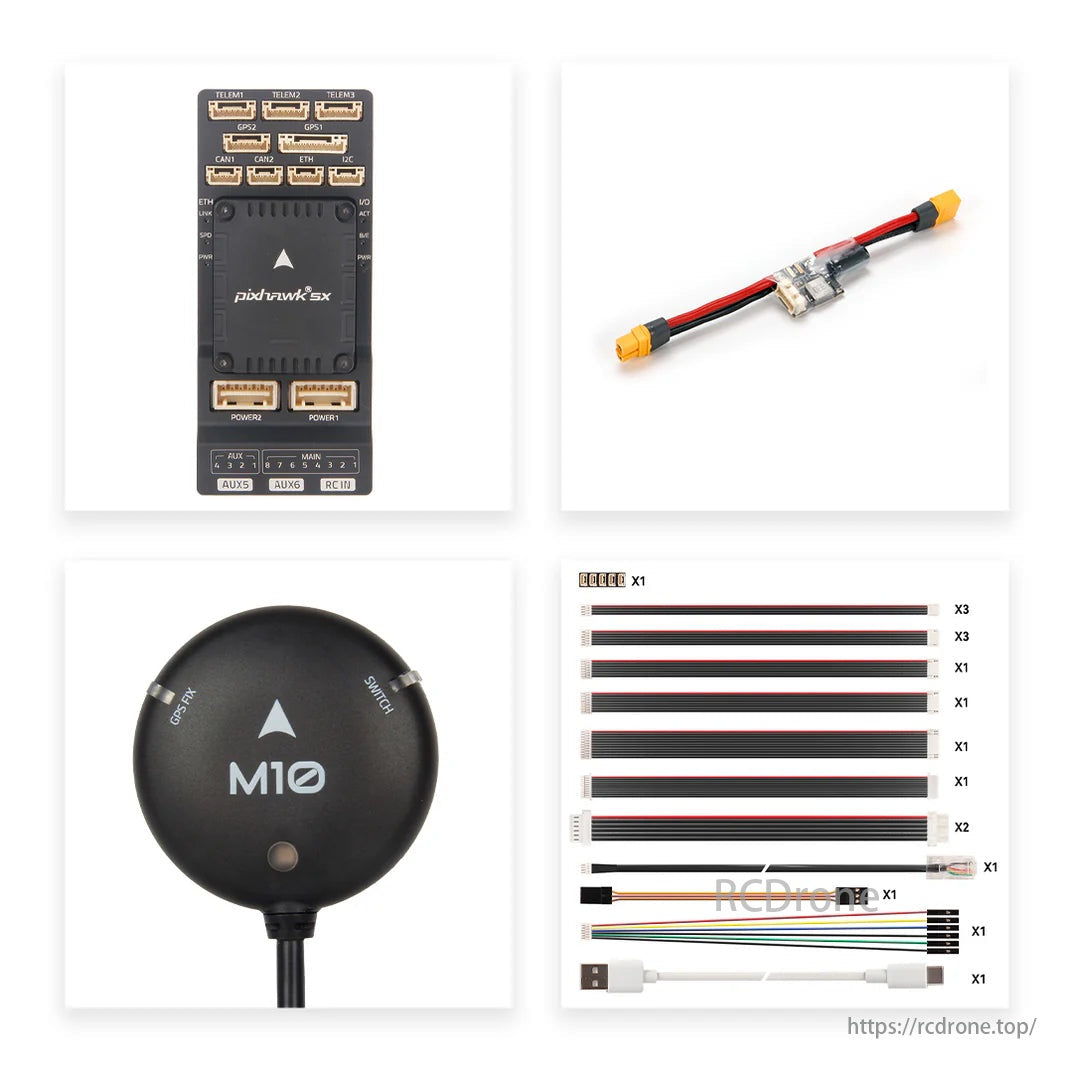
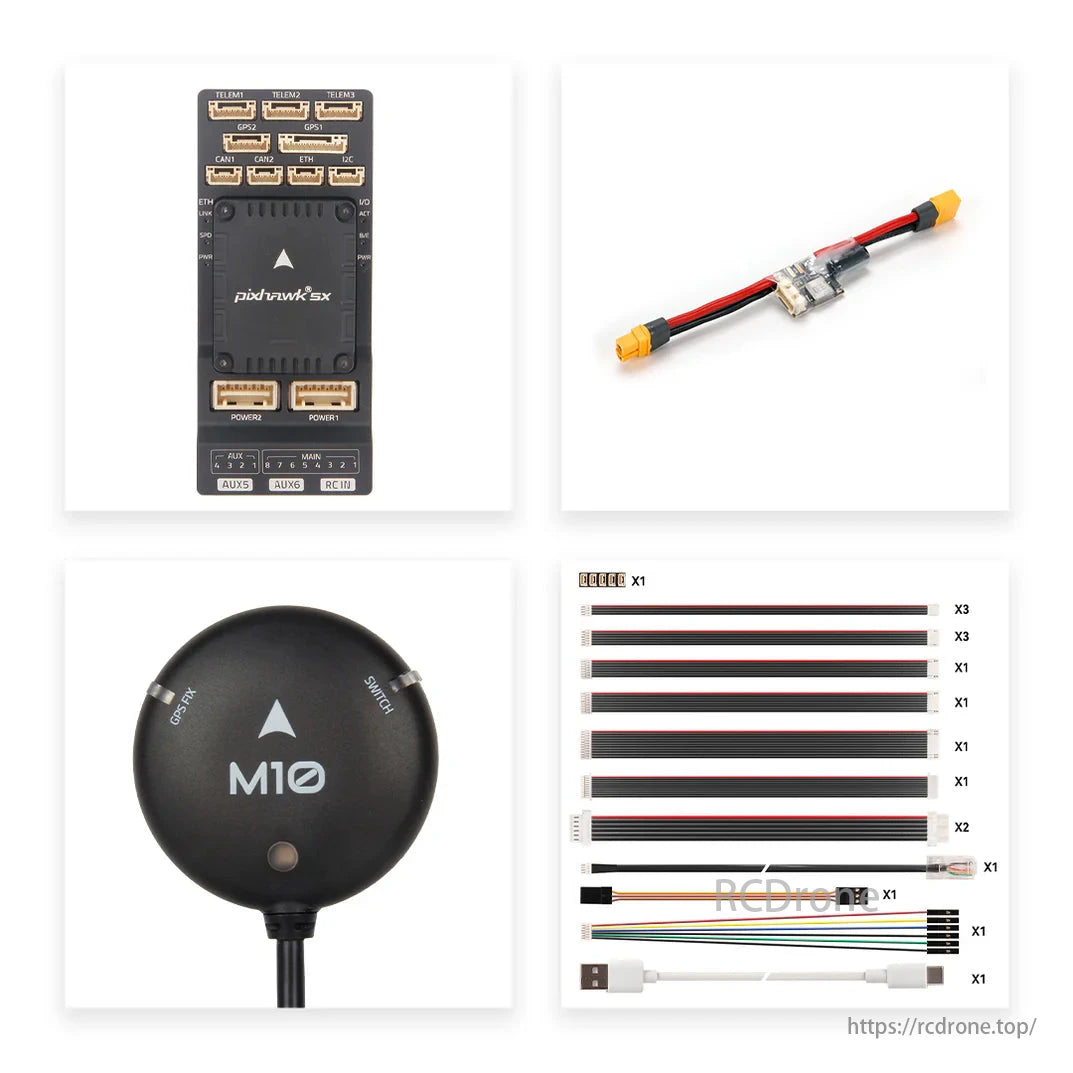
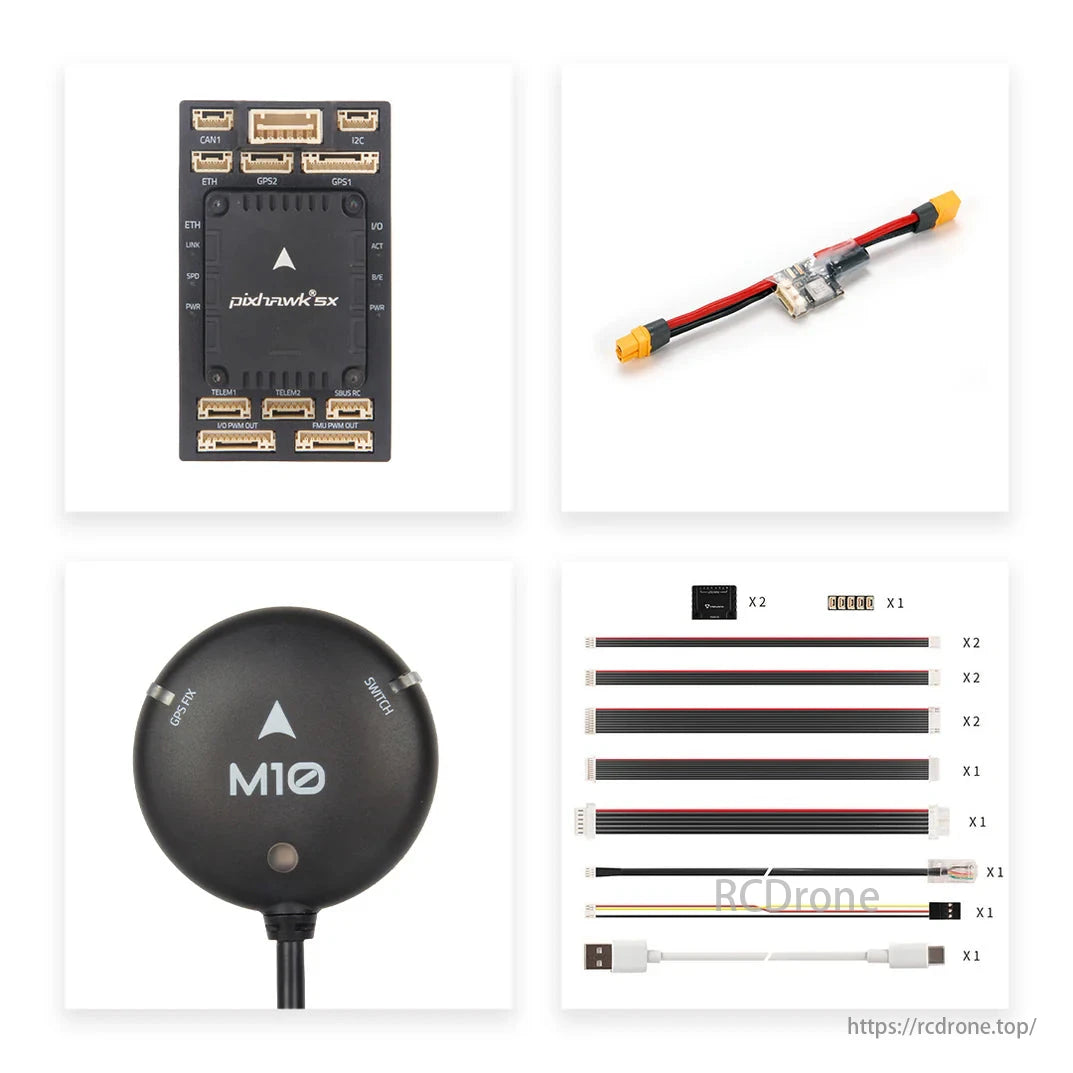
Контролер польоту Pixhawk 5X, модуль GPS M10, модуль живлення та різні кабелі для складання дрона.
Related Collections