Holybro Pixhawk 6X Autopilot H753 Flight Controller Module Standard Base / Mini Base PM02D M9N M10 GPS RC Мультироторні літаки
Holybro Pixhawk 6X Autopilot H753 Flight Controller Module Standard Base / Mini Base PM02D M9N M10 GPS RC Мультироторні літаки
HolyBro
Не вдалося завантажити інформацію про можливість самовивозу
Модуль контролера польоту Holybro Pixhawk 6X Autopilot H753 для багатороторних дронів і літаків
Контролер польоту Holybro Pixhawk 6X Autopilot H753 — це вдосконалений модульний контролер польоту, розроблений для промислових і комерційних багатороторних дронів і літаків з нерухомим крилом. Завдяки передовим технологіям і різноманітним конфігураціям, Pixhawk 6X забезпечує неперевершену продуктивність і надійність для вимогливих додатків.
Ключові характеристики
1. Розширене резервування та технологія BalancedGyro™
Pixhawk 6X має потрійне резервування з трьома датчиками ICM-45686 IMU (±32g) і двома датчиками барометра. Ці датчики повністю ізольовані та працюють на окремих шинах з окремим керуванням живленням, забезпечуючи надійність у критичних місіях. Технологія BalancedGyro™ оптимізує точність і стабільність сенсора.
2. Високопродуктивний процесор
Завдяки процесору STM32H753 із тактовою частотою до 480 МГц контролер польоту пропонує виняткові обчислювальні можливості. Він містить 2 МБ флеш-пам’яті та 1 МБ оперативної пам’яті для безперебійного виконання місії.
3. Модульний дизайн
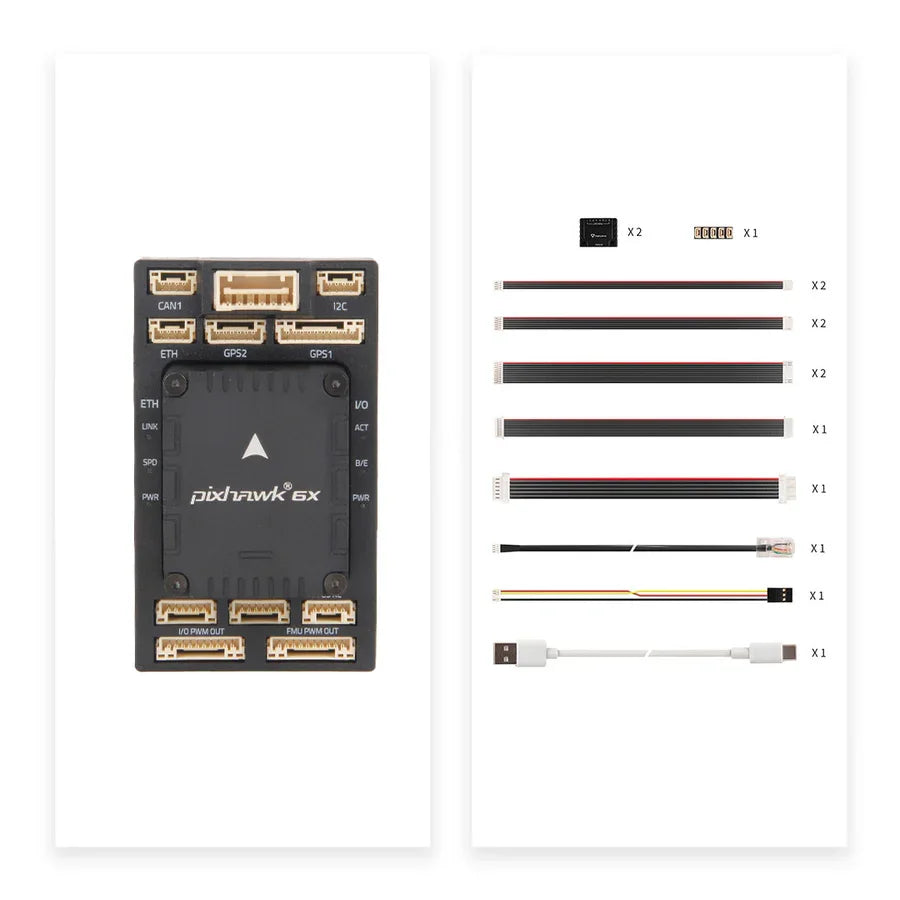
Pixhawk 6X має модульну конструкцію з окремими системами IMU, FMU і Base. Ці компоненти з’єднані між собою за допомогою 100-контактного та 50-контактного роз’ємів Pixhawk® Autopilot Bus, що забезпечує гнучку настройку та обслуговування.
4. Нова система віброізоляції
Використовуючи розроблений на замовлення міцний віброізоляційний матеріал, інноваційна система амортизації Pixhawk 6X забезпечує оптимальну продуктивність IMU з резонансними частотами у вищому спектрі, що робить його ідеальним для промислового та комерційного застосування.
5. Інтерфейс Ethernet
Інтерфейс Ethernet підтримує високошвидкісну інтеграцію з комп’ютером місії, забезпечуючи безперебійний обмін даними для вдосконаленого керування місією.
6. Плата IMU з контрольованою температурою
Плата IMU працює в оптимальному діапазоні температур, забезпечуючи стабільну роботу навіть у складних умовах.
7. Широка сумісність прошивки
Версія Rev 8 підтримує мікропрограму PX4 (1.14.3 або пізнішої версії) та мікропрограму Ardupilot (4.5.0 або пізнішої версії). Користувачі можуть встановити прошивку через Mission Planner або QGroundControl відповідно до своїх конкретних вимог.
Конфігурації
Holybro Pixhawk 6X доступний у різних конфігураціях для задоволення різноманітних потреб:
-
Стандартний плінтус: Розміри: 52,4 x 102 x 16,7 мм; Вага: 72,5 г (алюміній)
-
Міні плінтус: Розміри: 43,4 x 72,8 x 14,2 мм; Вага: 26.5г
-
Додаткові модулі GPS: M9N, M10 GPS для точної навігації
-
Модулі живлення: PM02D для надійного живлення
Технічні характеристики
Процесори та датчики:
-
Процесор FMU: STM32H753 32 Bit Arm® Cortex®-M7, 480 МГц, 2 МБ флеш-пам’яті, 1 МБ RAM
-
IO процесор: STM32F103 32 Bit Arm® Cortex®-M3, 72 МГц, 64 КБ SRAM
-
Датчики IMU: 3x ICM-45686 з технологією BalancedGyro™
-
Барометри: ICP20100 і BMP388
-
Магнітометр: BMM150
-
Елемент безпеки: Обладнання NXP EdgeLock SE050 Plug & Trust
Електричні дані:
-
Номінальна напруга:
-
Максимальна вхідна напруга: 6В
-
Вхід живлення USB: 4,75~5,25 В
-
Вхід сервоприводу: 0~36 В
-
-
Поточні рейтинги:
-
Обмежувач вихідного струму Telem1: 1.5A
-
Комбінований обмежувач вихідного струму всіх інших портів: 1,5 А
-
-
Напруга сигналу ШІМ: За замовчуванням 3,3 В (регулюється до 5 В за допомогою модифікації вбудованого резистора)
Механічні дані:
-
Розміри модуля контролера польоту: 38,8 x 31,8 x 16,8 мм; Вага: 31,3 г
-
Варіанти плінтуса:
-
Стандартний плінтус: 52,4 x 102 x 16,7 мм; Вага: 72,5 г
-
Міні-плінтус: 43,4 x 72,8 x 14,2 мм; Вага: 26,5 г
-
Додатки
Holybro Pixhawk 6X призначений для:
-
Промислові та комерційні багатороторні дрони
-
Навігація літака
-
Розширений контроль місії з високошвидкісною інтеграцією даних
Автопілот Holybro Pixhawk 6X пропонує універсальне, міцне та надійне рішення, незалежно від того, створюєте ви індивідуальний мультиротор чи покращуєте систему з нерухомим крилом. Його модульна конструкція, передова технологія та численні параметри конфігурації гарантують, що він відповідає потребам будь-якого професійного застосування.
Related Collections