Holybro Pixhawk 6X (ICM-45686) контролер польоту – потрійний резервний IMU, STM32H753, Ethernet, сумісний з PX4 та ArduPilot
Holybro Pixhawk 6X (ICM-45686) контролер польоту – потрійний резервний IMU, STM32H753, Ethernet, сумісний з PX4 та ArduPilot
HolyBro
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
Модульний автопілот Holybro Pixhawk 6X (ICM-45686) є високопродуктивним, модульним контролером польоту, розробленим для вимогливих промислових та комерційних дронів. Він оснащений триплексно-резервними ICM-45686 IMU з технологією BalancedGyro™, подвійними барометрами та процесором STM32H753, що працює на частоті 480 МГц. Pixhawk 6X забезпечує неперевершену надійність, реальний час виконання та гнучкість. Його модульна архітектура, вдосконалена ізоляція від вібрацій та інтерфейс Ethernet роблять його ідеальним для систем БПЛА, які потребують надійного контролю, точності та адаптивності до місії.
Ключові особливості
-
Подвійна надмірність IMU: 3x ICM-45686 IMU (±32g) з технологією BalancedGyro™ для стійкої інерційної навігації
-
Два барометри: ICP20100 та BMP388 для підвищеної точності висоти
-
Процесор високої швидкості: STM32H753 Cortex-M7, 480MHz, з 2MB Flash & 1MB RAM
-
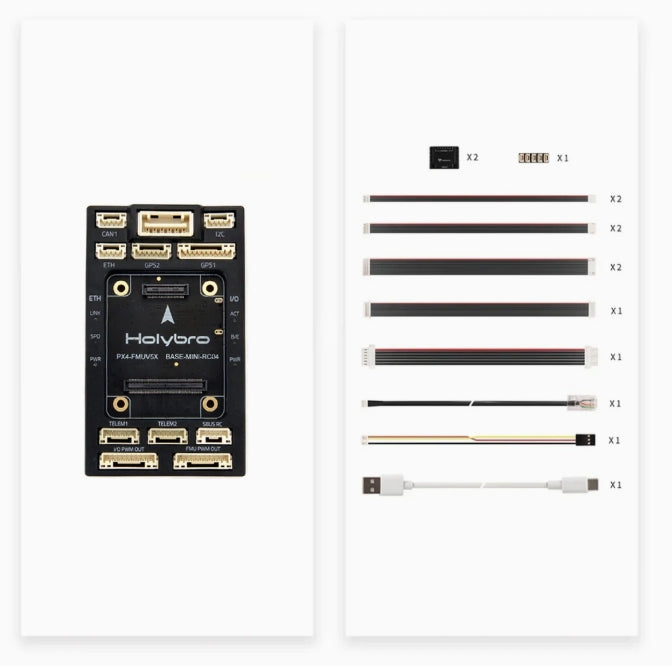
Модульний дизайн: Розділяє FMU, IMU та базову плату, з'єднані через 100-контактний та 50-контактний шини Pixhawk®
-
Плата IMU з контролем температури: Забезпечує оптимальну роботу сенсорів в різних температурних діапазонах
-
Інтеграція Ethernet: Підтримує високо-швидкісну комунікацію з комп'ютерами місії
-
Підтримка цифрового блоку живлення: Забезпечує більш точні вимірювання напруги та струму
Розширена система ізоляції: Міцний, спеціально розроблений матеріал забезпечує високу амортизацію вібрацій
-
Сумісність з прошивкою: Поставляється з PX4 (v1.14.3+), підтримує ArduPilot (v4.5.0+)
Специфікації
Процесори та датчики
| Компонент | Деталі |
|---|---|
| FMU Процесор | STM32H753, ARM Cortex-M7, 480MHz, 2MB Flash, 1MB RAM |
| IO Процесор | STM32F103, ARM Cortex-M3, 72MHz |
| IMU Датчики | 3x ICM-45686 (BalancedGyro™) |
| Барометр | ICP20100 & BMP388 |
| Магнітометр | BMM150 |
| Безпечний елемент | NXP SE050 Plug & Trust |
Електричні параметри
| Параметр | Value |
|---|---|
| Максимальна вхідна напруга | 6В |
| USB живлення | 4.75~5.25V |
| Напруга сервоприводу | 0~36V |
| Обмеження струму Telem1 & GPS2 | 1.5A в сумі |
| Обмеження струму інших портів | 1.5A в сумі |
| Напруга PWM сигналу | За замовчуванням 3.3V (перемикається на 5V через резистор) |
| Температура експлуатації | -25°C до +85°C |
Механічні розміри та вага
| Компонент | Розміри (мм) | Вага (г) |
|---|---|---|
| Контролер польоту | 38.8 x 31.8 x 16.8 | 31.3g |
| Стандартна базова плата | 52.4 x 102 x 16.7 | 72.5g |
| Міні базова плата | 43.4 x 72.8 x 14.2 | 26.5г |
Сумісність з прошивкою
-
PX4: Повна підтримка з версії 1.14.3 і вище
-
ArduPilot: Повна підтримка з версії 4.5.0 і вище
-
Підтримується прошивка мікропрограми через Mission Planner або QGroundControl
Застосування
Ідеально підходить для інтеграції в:
-
Промислові дрони
-
Комерційні системи БПЛА
-
Літаки VTOL
-
Академічні дослідницькі платформи
-
Місії з багатосенсорними системами та високою надійністю
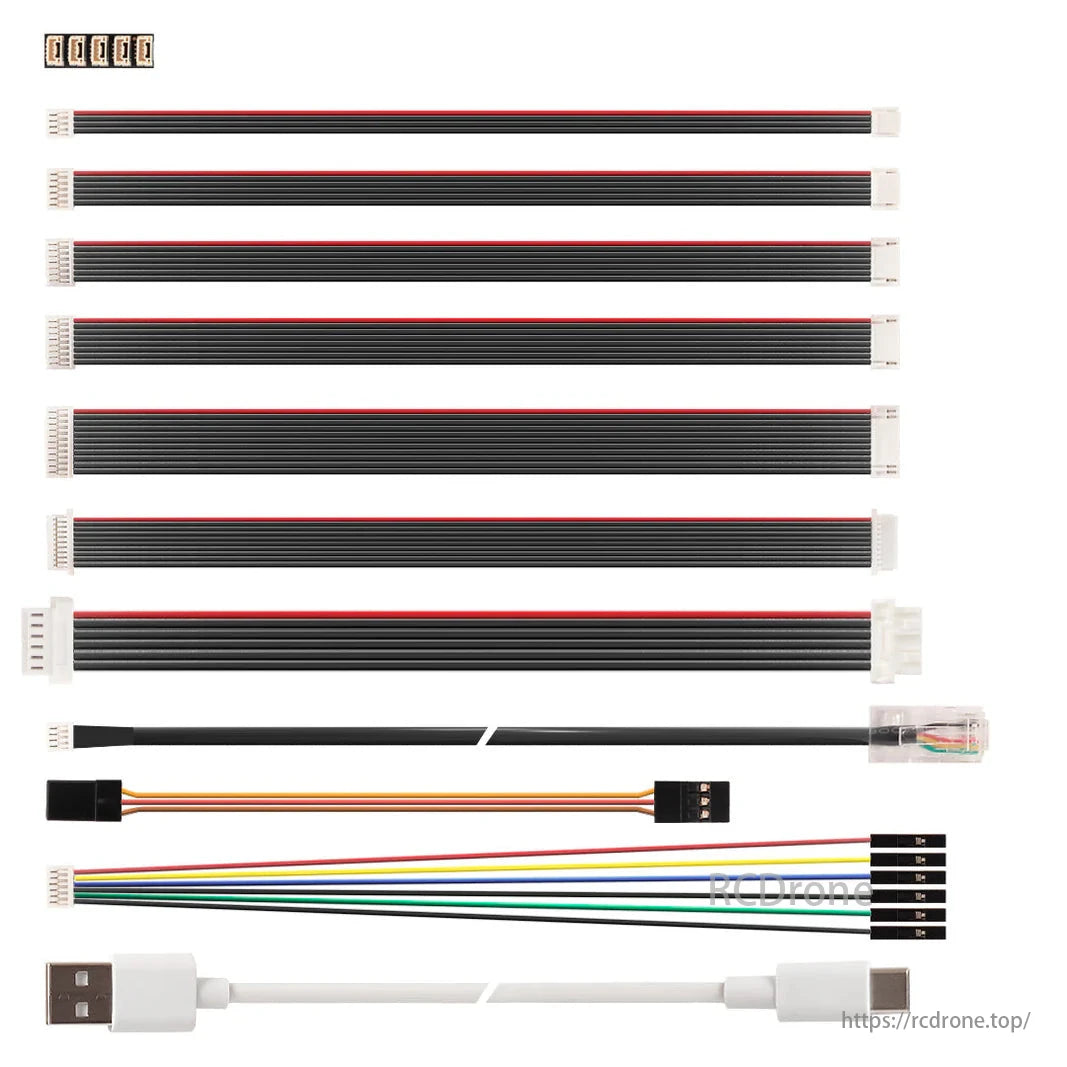
Деталі

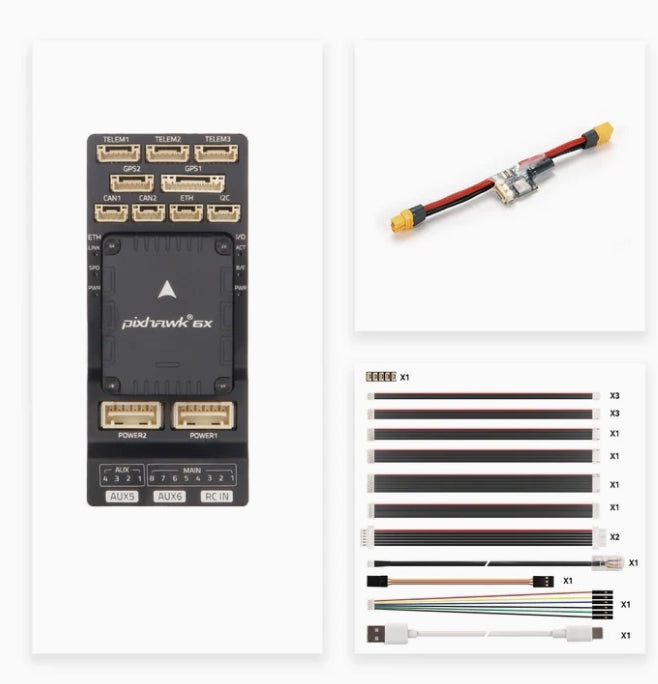
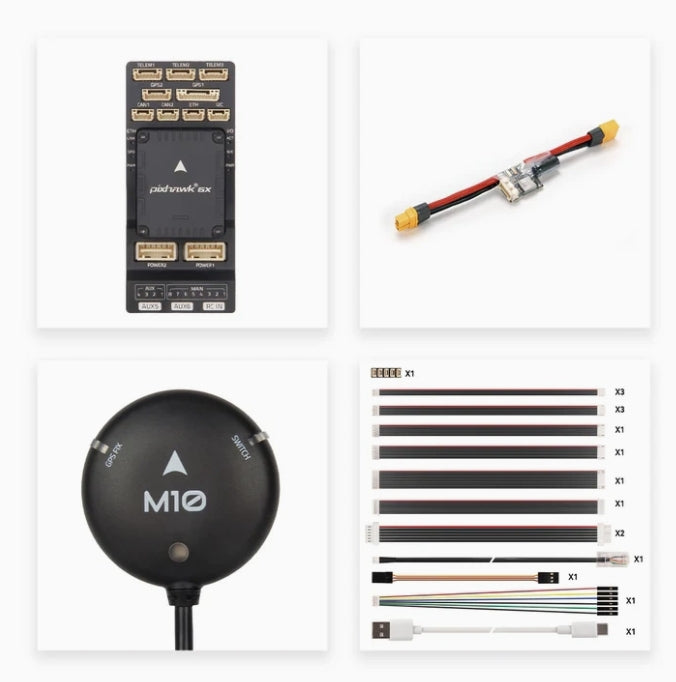
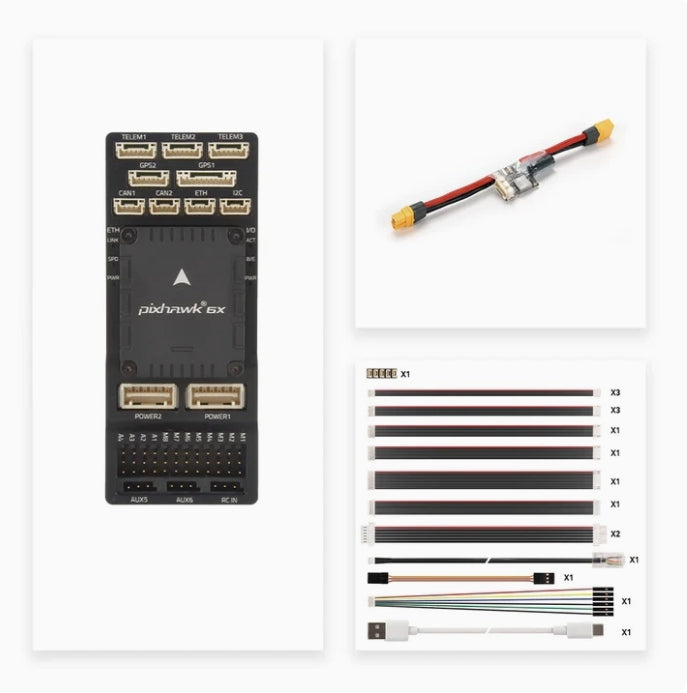
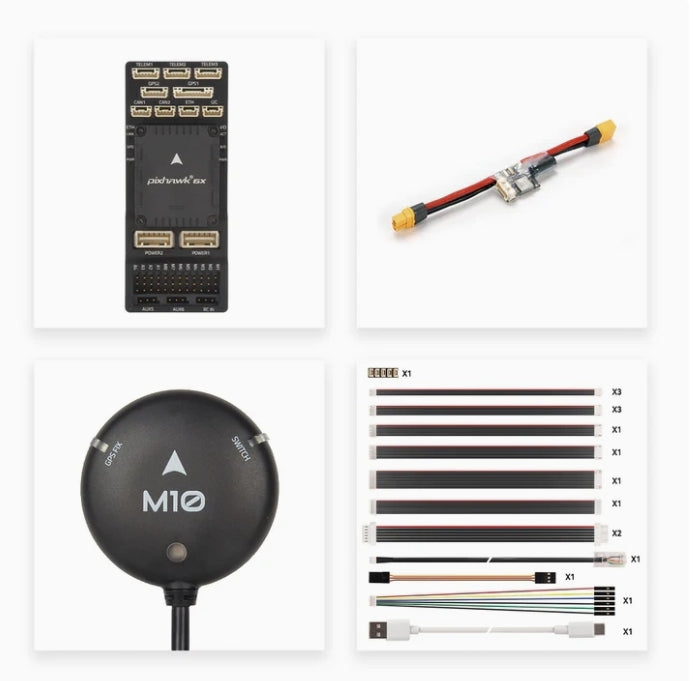
Pixhawk 6X пропонує більш тонкий дизайн з двома моделями. Він має покращений пін-хедер для кращого з'єднання та продуктивності, що робить його ідеальним для просунутих застосувань. Виберіть правильну модель для ваших потреб.
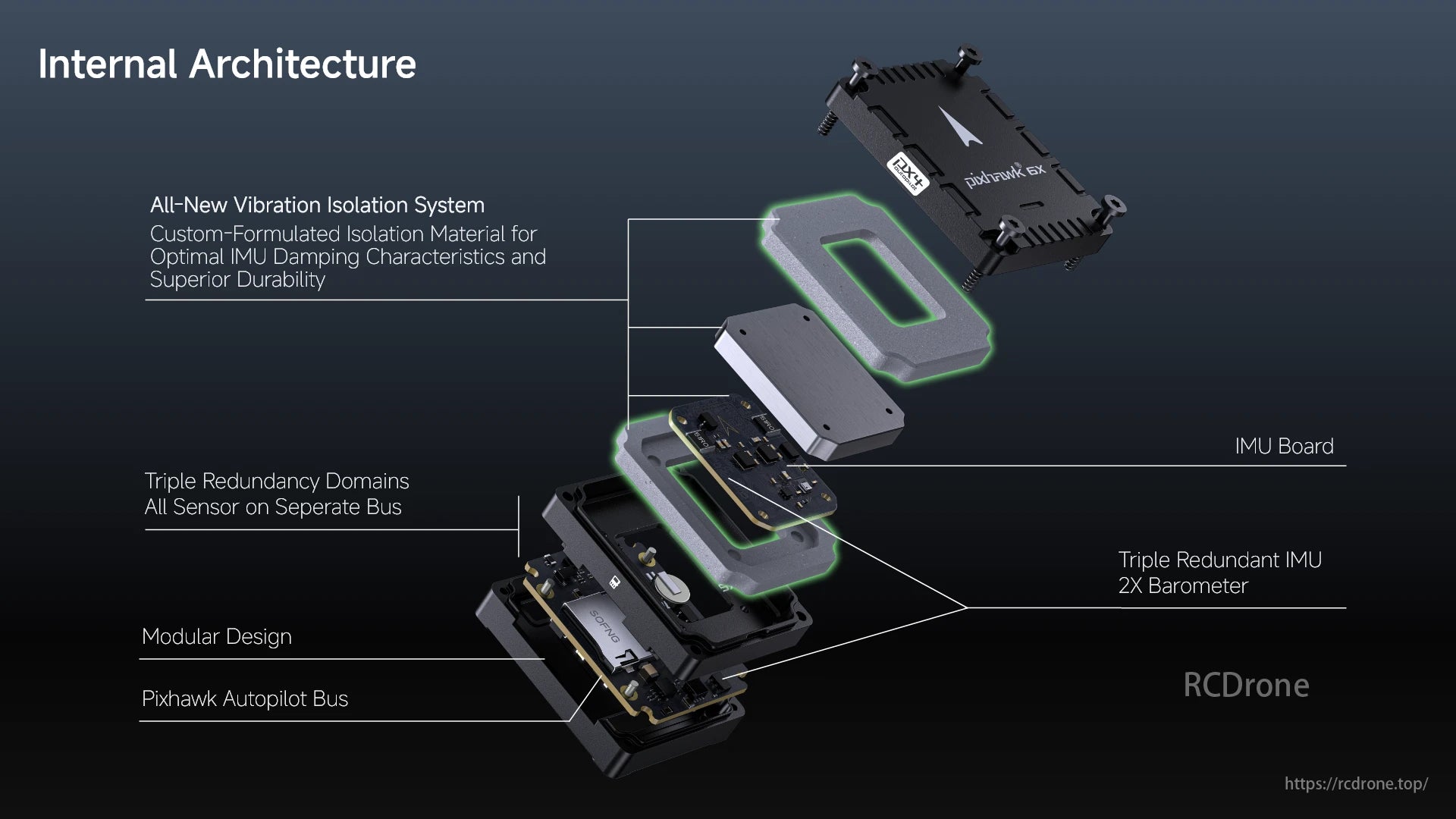
Holybro Pixhawk 6X пропонує ізоляцію від вібрацій, потрійну резервність, модульний дизайн, автопілотний шина, плату IMU та 2x барометри для покращеної продуктивності.
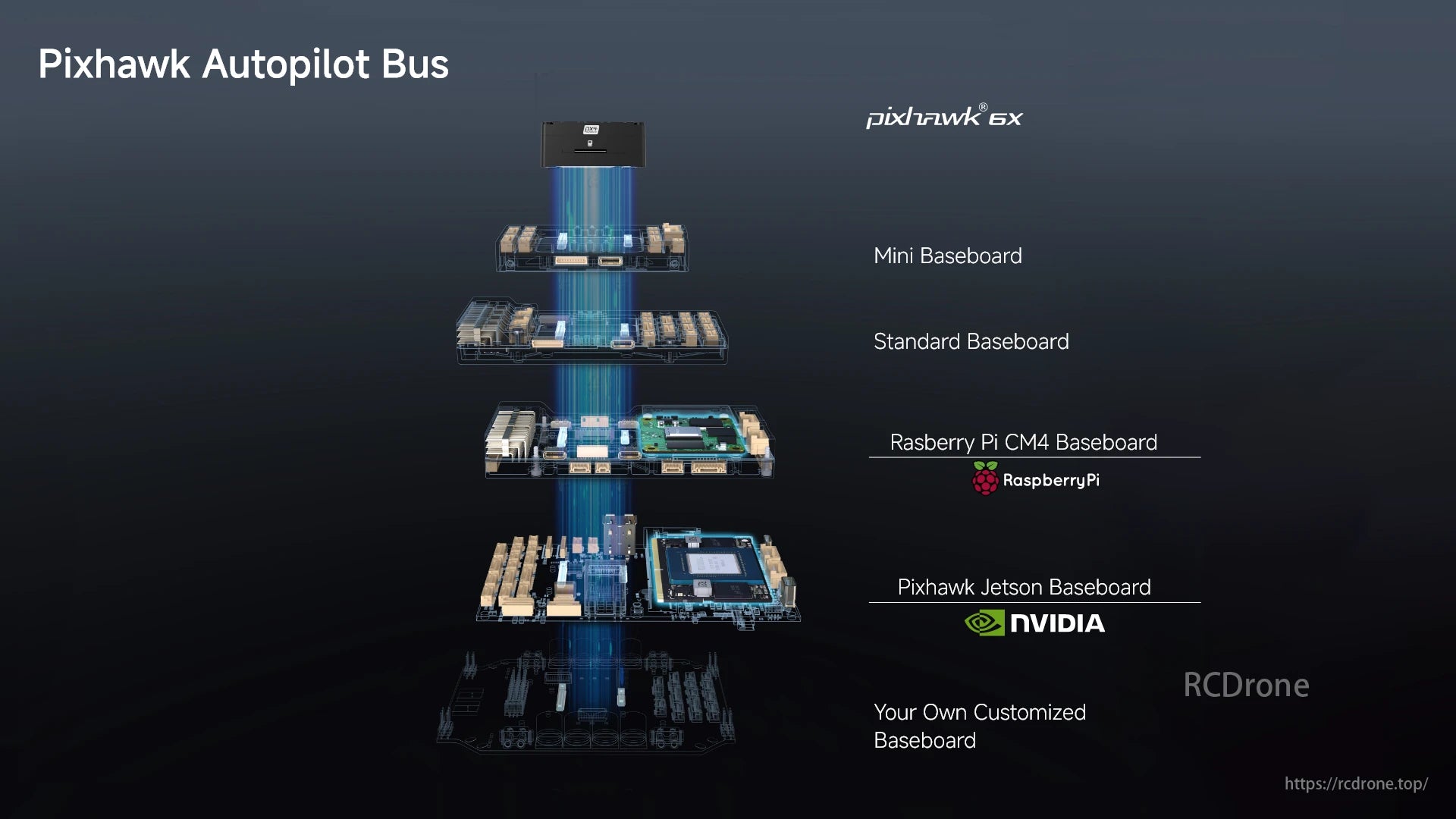
Pixhawk Автопілотна шина включає Pixhawk 6X, Mini Baseboard, Standard Baseboard, Raspberry Pi CM4 Baseboard, Jetson Baseboard та індивідуальні варіанти.

Резистори компенсації температури, резервний IMU та барометр, різноманітні сенсорні технології та ізоляційний матеріал забезпечують точність.

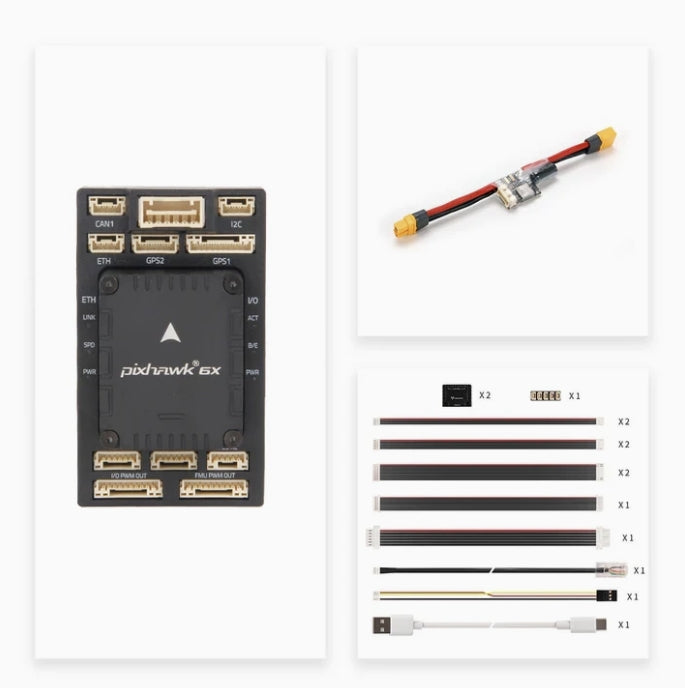
Автопілотна шина Pixhawk, процесор STM H753 32-біт (480 МГц), Invensense ICM45686 IMU з технологією BalancedGyro та NXP EdgeLock SE050 Secure Element інтегровані в плату FMU.
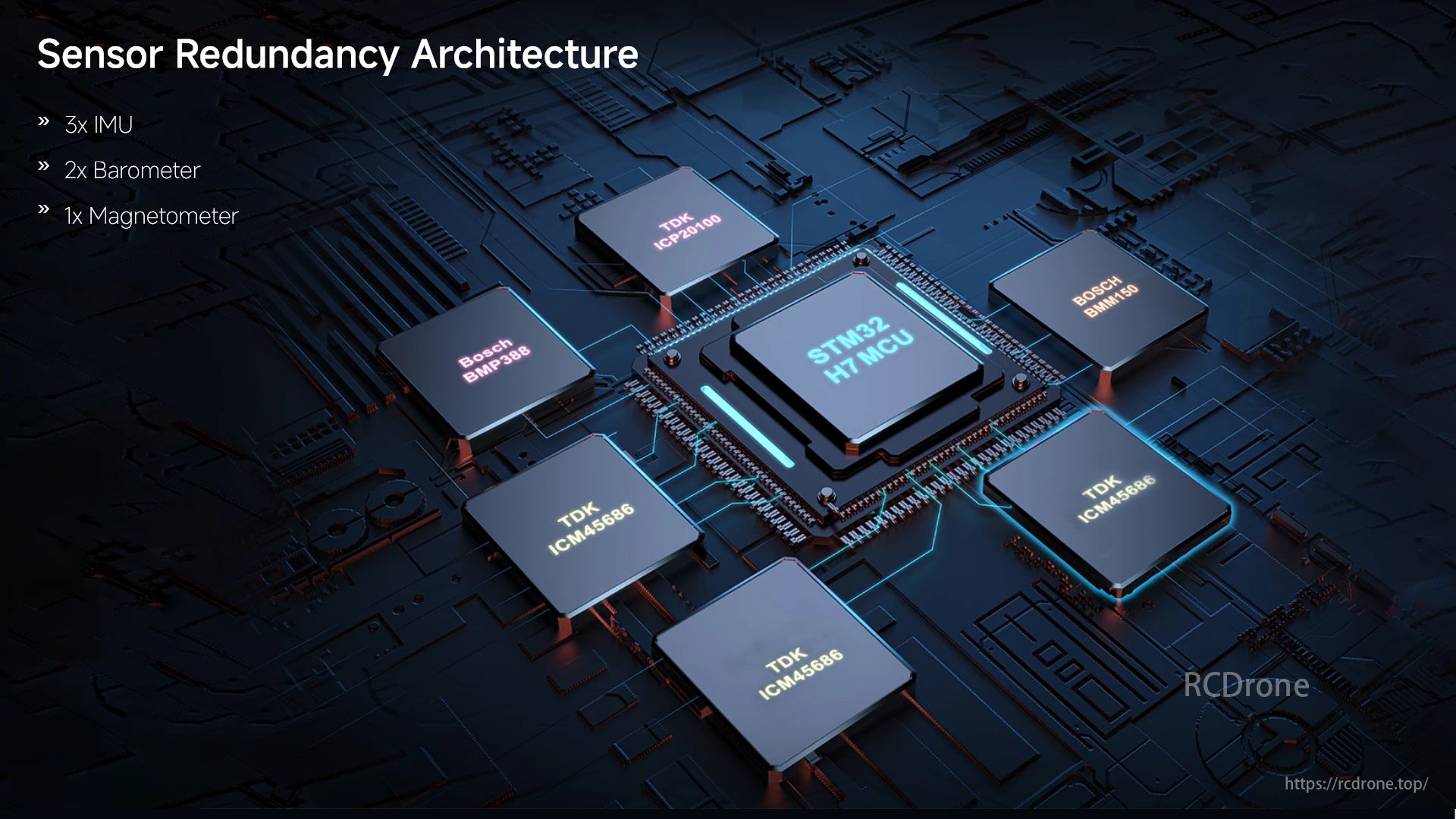
Архітектура резервування сенсорів з 3x IMU, 2x барометри та 1x магнітометр.Особливості: мікроконтролер STM32 H7, датчики TDK ICM-45686, Bosch BMP388 та BMM50 для покращеної продуктивності.
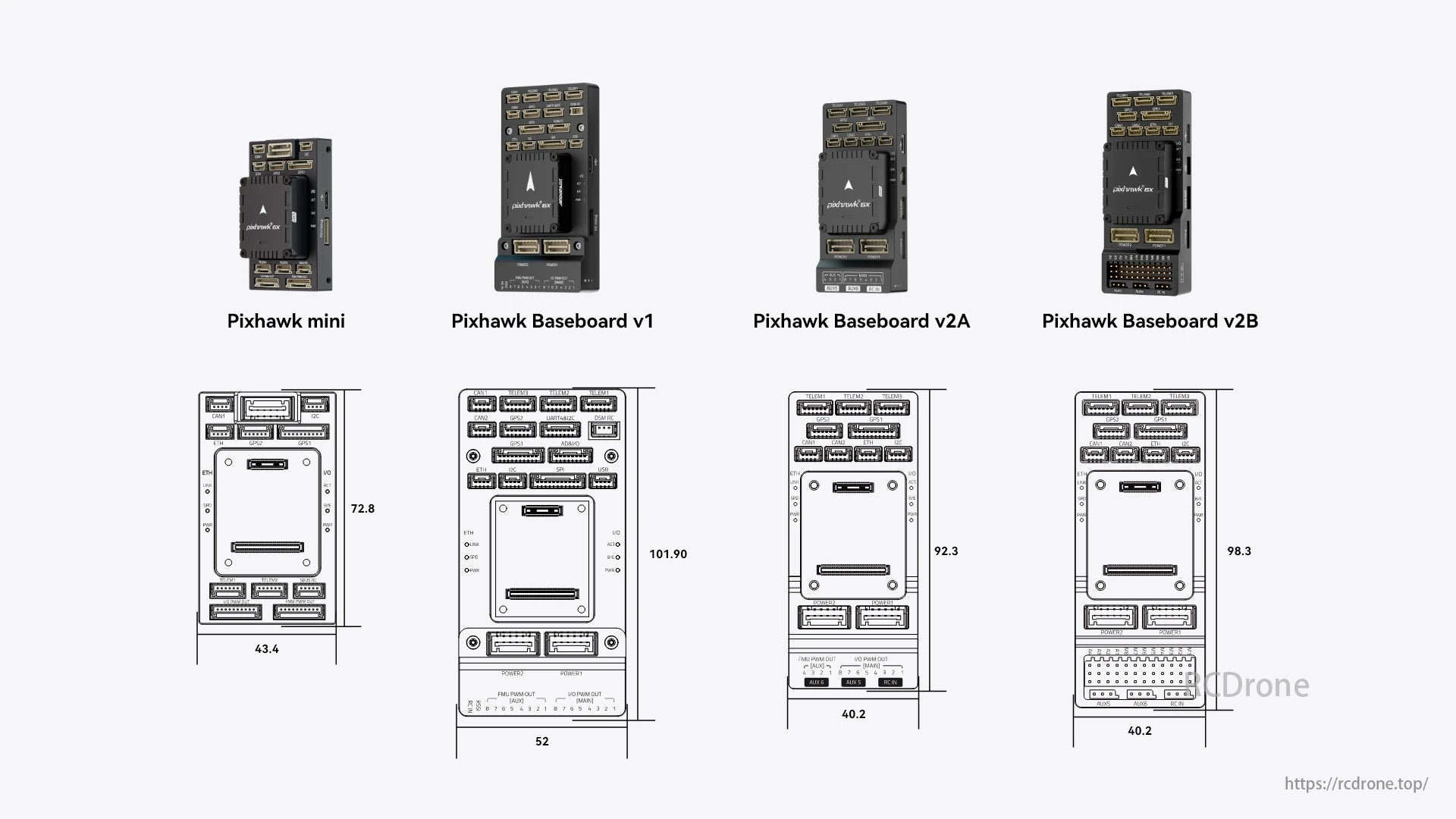
Контролери польоту Pixhawk mini, Baseboard v1, v2A та v2B з розмірами: 43.4x72.8, 52x101.90, 40.2x92.3 та 40.2x98.3 відповідно. На кожній моделі видно різні порти та роз'єми.
Related Collections