Контролер польоту з автопілотом Holybro Pixhawk 6X Pro
Контролер польоту з автопілотом Holybro Pixhawk 6X Pro
HolyBro
Не вдалося завантажити інформацію про можливість самовивозу
Ключовий момент дизайну
- Високопродуктивний промисловий IMU ADIS16470 з високим динамічним діапазоном акселерометра (±40 g), ідеально підходить для точне визначення руху в вимогливих додатках БПЛА
- Повністю новий вдосконалений міцний віброізоляційний матеріал із резонансною частотою у вищому спектрі, ідеально підходить для промислових і комерційних застосувань безпілотників
- Потрійний резервований IMU та подвійний резервний барометр на окремих шинах
- Високопродуктивний процесор STM32H753
- Модульний контролер польоту: розділені IMU, FMU та базова система
- Конструкція, орієнтована на безпеку, включає датчики від різних виробників і лінійок моделей
- Незалежний LDO живить кожен датчик із незалежним керуванням потужністю.
- Інтерфейс Ethernet для високошвидкісної інтеграції комп'ютера. Безтрансформаторний можна досягти за допомогою кінцевих резисторів 50 Ом на цільовому пристрої (AN2190 50 Ом закінчення).
- Плата IMU з контрольованою температурою, що забезпечує оптимальну робочу температуру IMU
- Апаратно перемикається режим сигналу 3,3 В або 5 В (потрібна модифікація базової плати)
Примітка:
- Для роботи цього продукту потрібен модуль FC + плінтус. Модуль FC або базова плата самі по собі не працюватимуть.
Специфікація
Процесори та датчики
- Процесор FMU: STM32H753
- 32-розрядний ARM® Cortex®-M7, 480 МГц, 2 МБ флеш-пам’яті, 1 МБ RAM
- Процесор IO: STM32F103
- 32-бітний Arm® Cortex®-M3, 72 МГц, 64 КБ SRAM
- Бортові датчики
- Розгін/гіроскоп: ADIS16470
- ±40 г, Вібраційно ізольований, промисловий IMU
- Розгін/гіроскоп: IIM-42652
- ±16 г, Вібраційно ізольований, промисловий IMU
- Прискорення/гіроскоп: ICM-45686 із технологією BalancedGyro™
- ±32 г, жорсткий монтаж
- Барометр: ICP20100
- Барометр: BMP388
- Магніт: BMM150
- Розгін/гіроскоп: ADIS16470
- NXP Елемент апаратного захисту EdgeLock SE050 Plug & Trust
Електричні дані
- Номінальна напруга:
- Максимальна вхідна напруга: 6В
- Вхід живлення USB: 4,75~5,25 В
- Вхід сервоприводу: 0~36 В
- Поточні рейтинги:
- Обмежувач вихідного струму Telem1: 1.5A
- Комбінований обмежувач вихідного струму всіх інших портів: 1,5 А
- Робоча температура: -25-85°C
Механічні дані
- Розміри
- Модуль контролера польоту: 38,8 x 31,8 x 30,1 мм
- Стандартний плінтус: 52,4 x 102 x 16,7 мм (Алюміній)
- Міні-плінтус: 43,4 x 72,8 x 14,2 мм
- вага
- Модуль контролера польоту: 50 г
- Стандартний плінтус: 72,5 г (Алюміній)
- Міні-плінтус: 26.5г
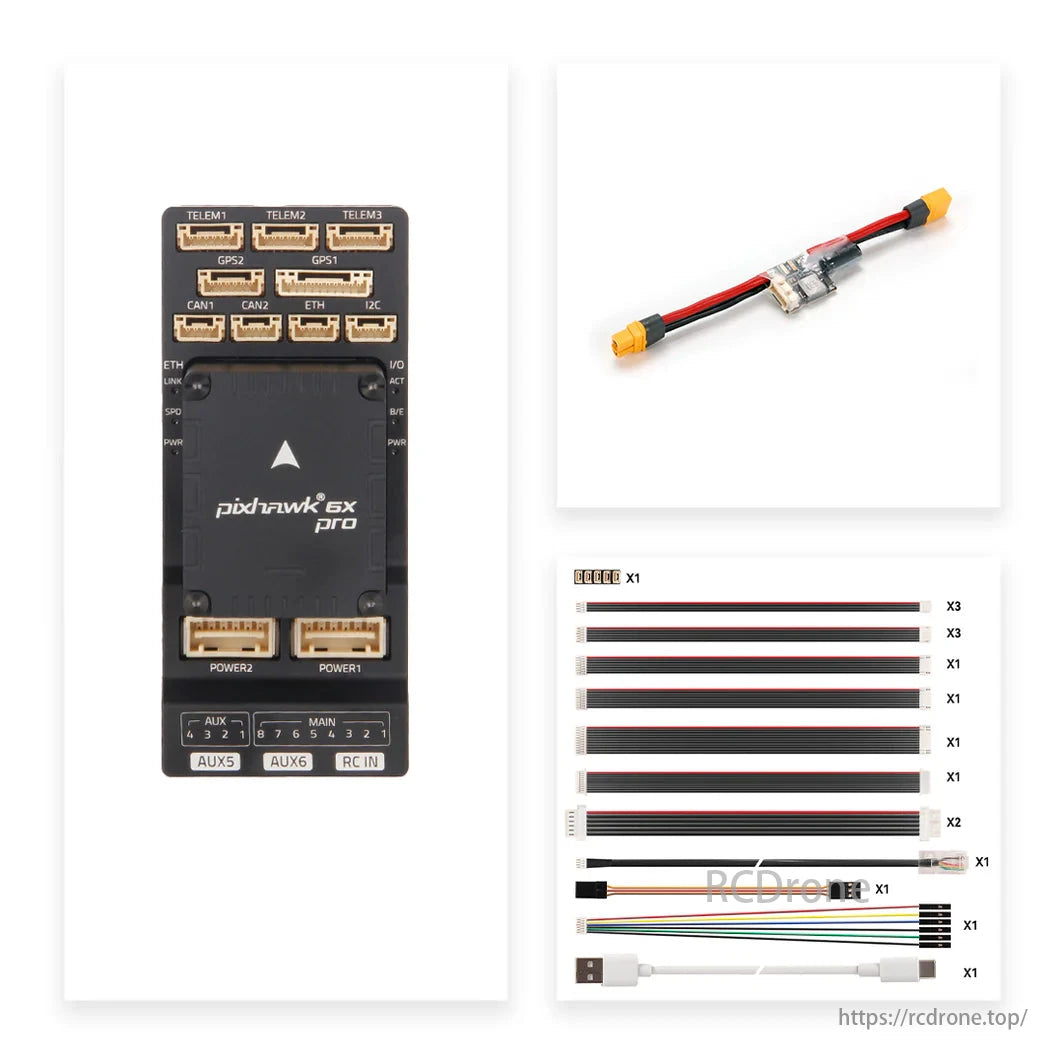
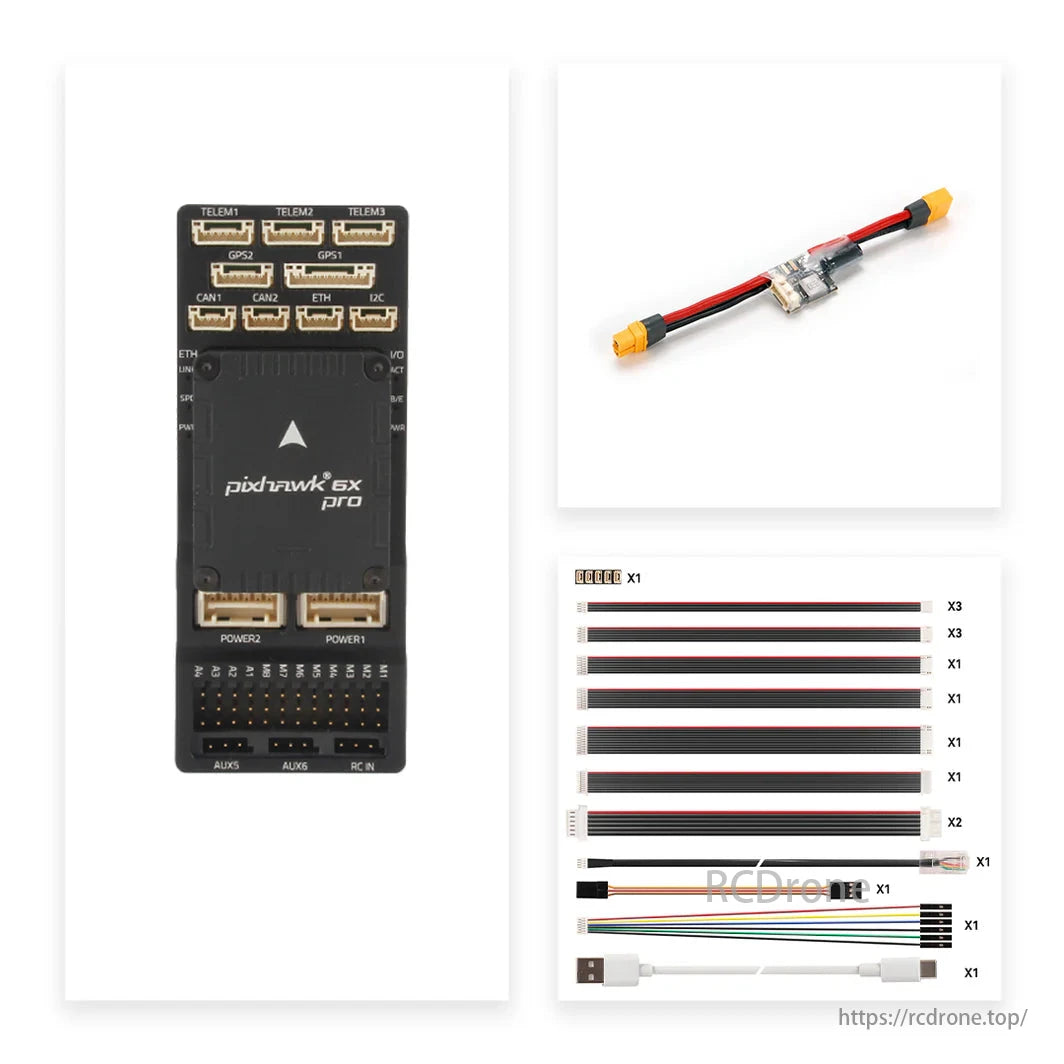
Пакет включає
Модуль FC включає лише:
- Pixhawk Модуль контролера польоту 6X Pro
- Додаткова заміна амортизатора IMU (м'якша, ніж попередньо встановлена)
Стандартний набір V2A/V2B/Mini включає:
- Модуль польотного контролера Pixhawk 6X Pro
- Pixhawk Standard Baseboard v2A/ Pixhawk Standard Baseboard v2B/ Міні плінтус
- Силовий модуль HV PM02D
- Набір кабелів
Подробиці
Абсолютно новий дизайн віброізоляції
Ця нова конструкція віброізоляції використовує змінний струмспеціально розроблений міцний ізоляційний матеріал на силіконовій основі замість традиційного спіненого дизайну. Бпідтверджений обширними дослідженнями та розробками та випробуваннями, він пропонує оптимальні характеристики демпфування IMU з резонансною частотою у вищому спектрі, ідеально підходить для промислових і комерційних дронів
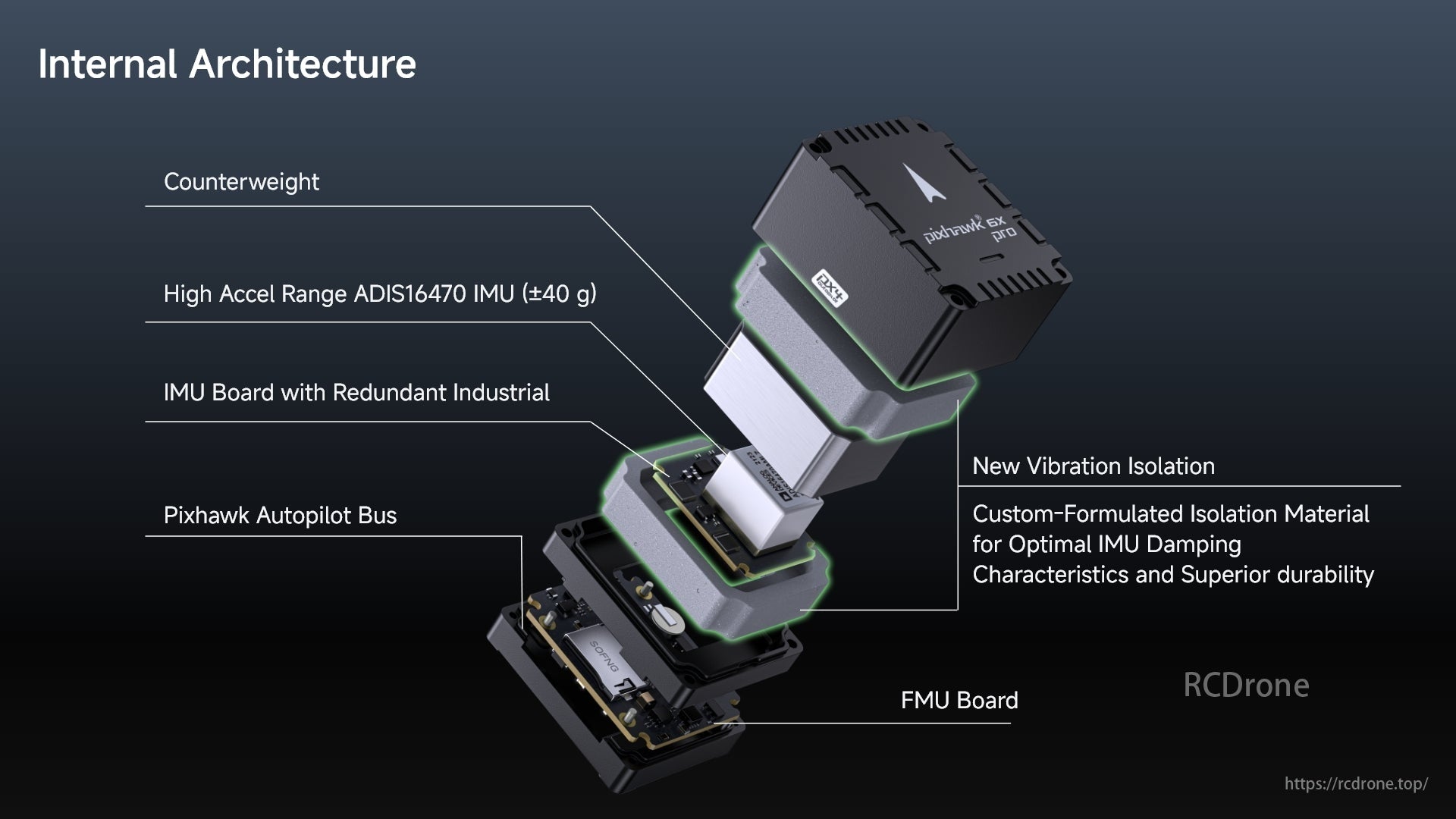
Внутрішня архітектура: противага, високий діапазон прискорення ADIS16470 IMU (±40 г), резервна промислова плата IMU, шина автопілота Pixhawk, нова віброізоляція, плата FMU.
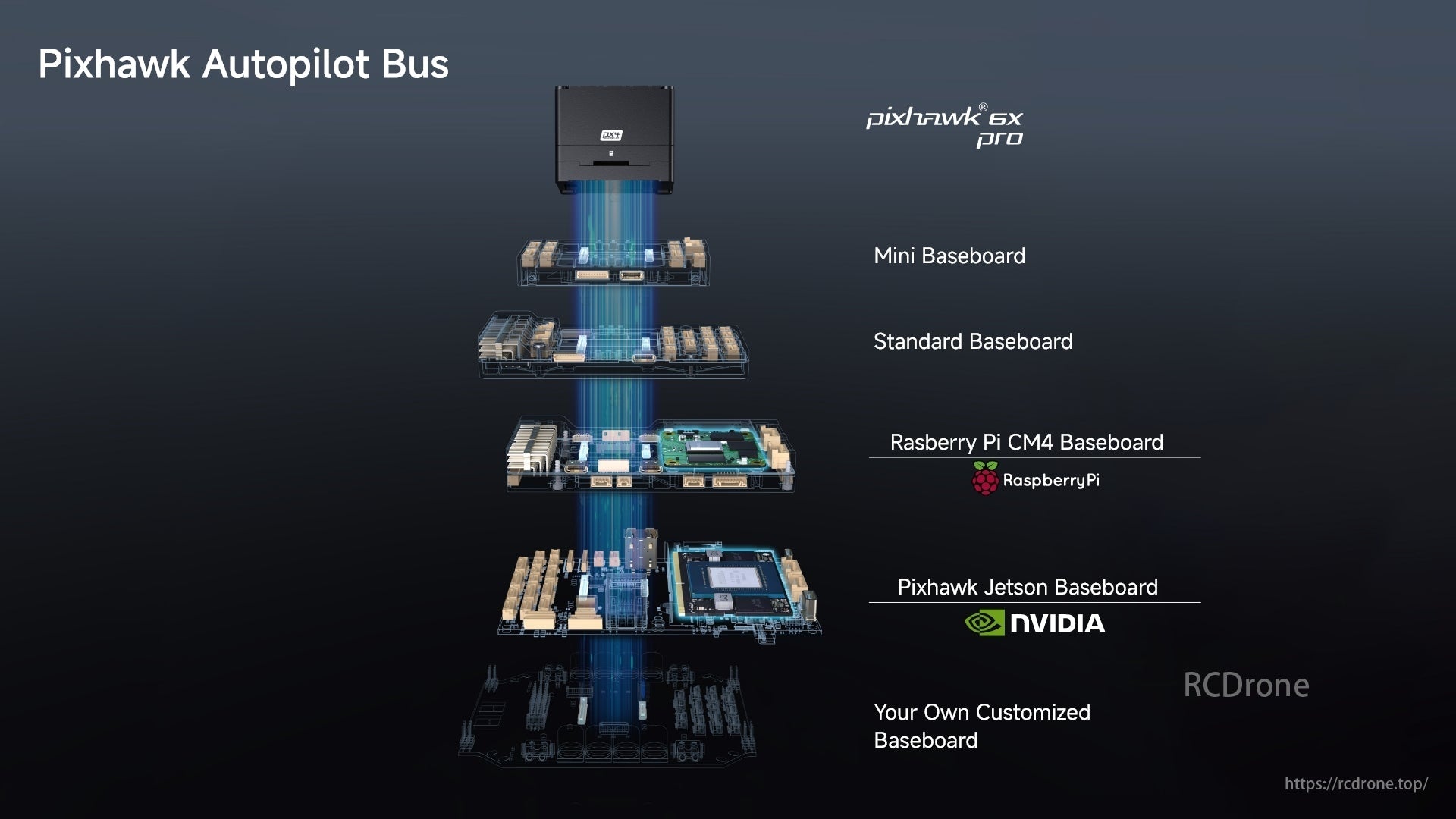
Pixhawk Autopilot Bus підключає Mini, Standard, Raspberry Pi CM4, Jetson Baseboards і спеціальні панелі.
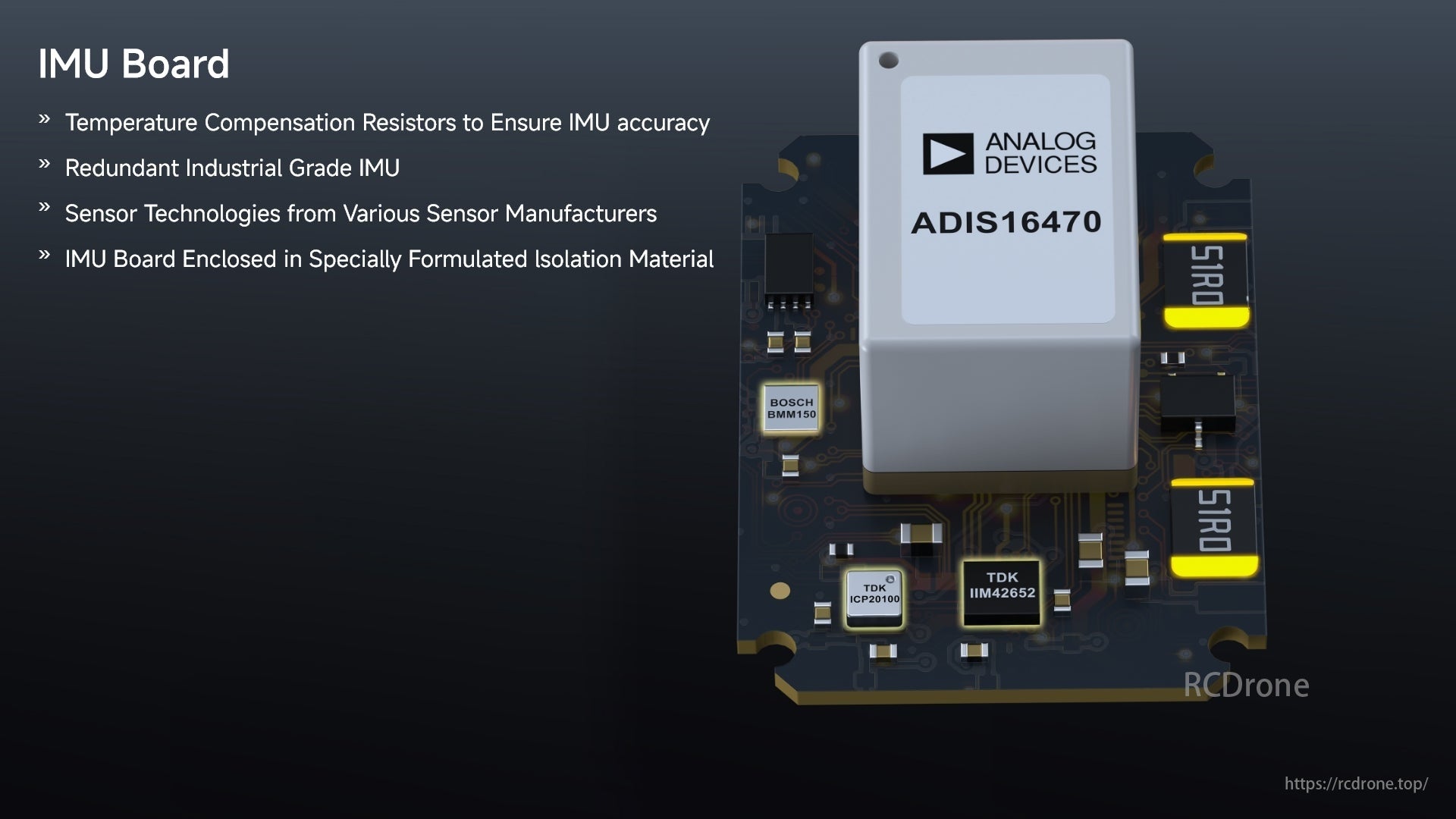
Плата IMU оснащена резисторами температурної компенсації, резервним IMU промислового класу, датчиками від різних виробників і укладена в ізоляційний матеріал.
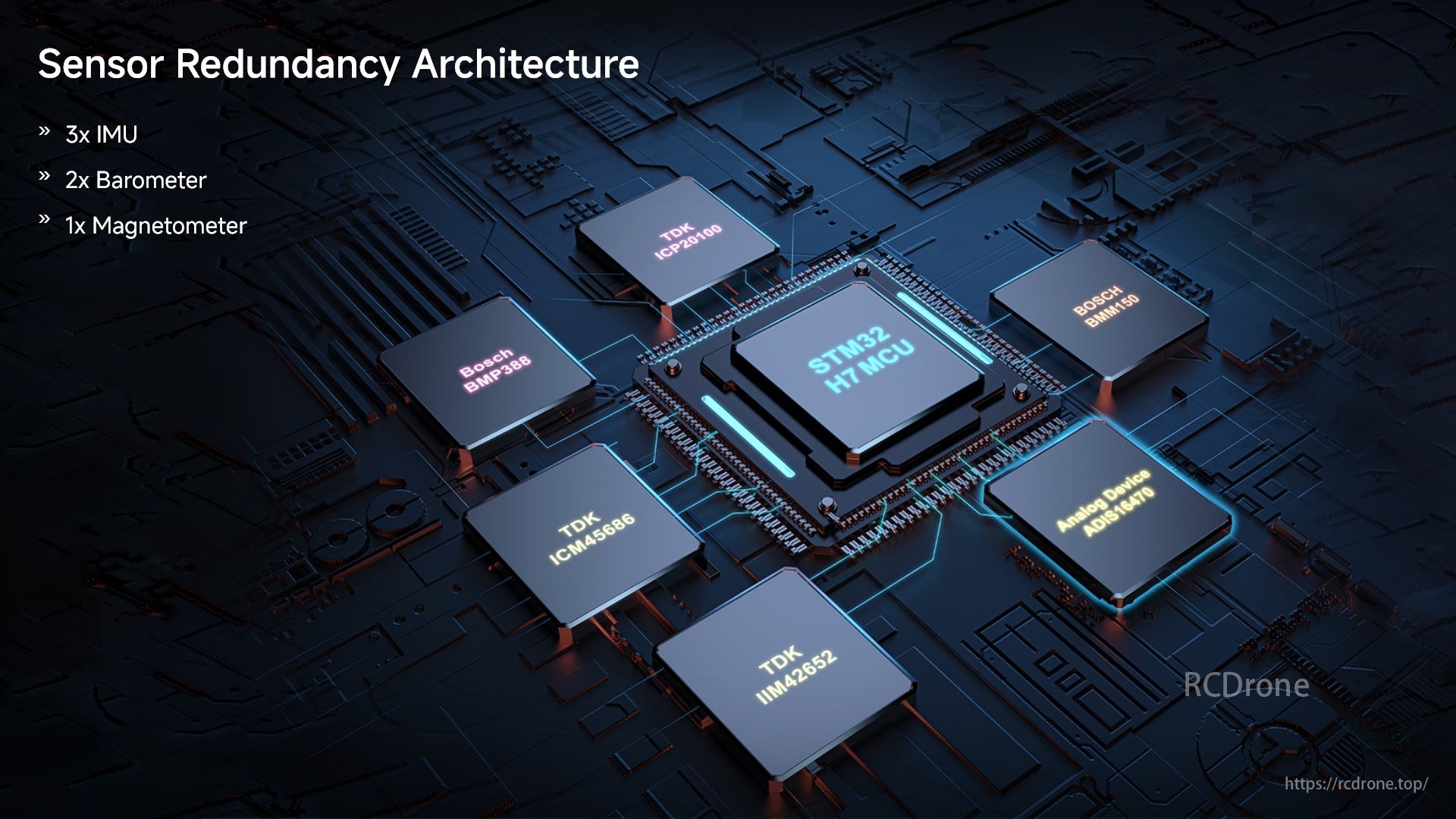
Архітектура резервування датчиків включає 3x IMU, 2x барометр і 1x магнітометр, включаючи такі компоненти, як STM32 H7 MCU, TDK IC, Bosch BMP388 і Analog Devices ADIS16470.
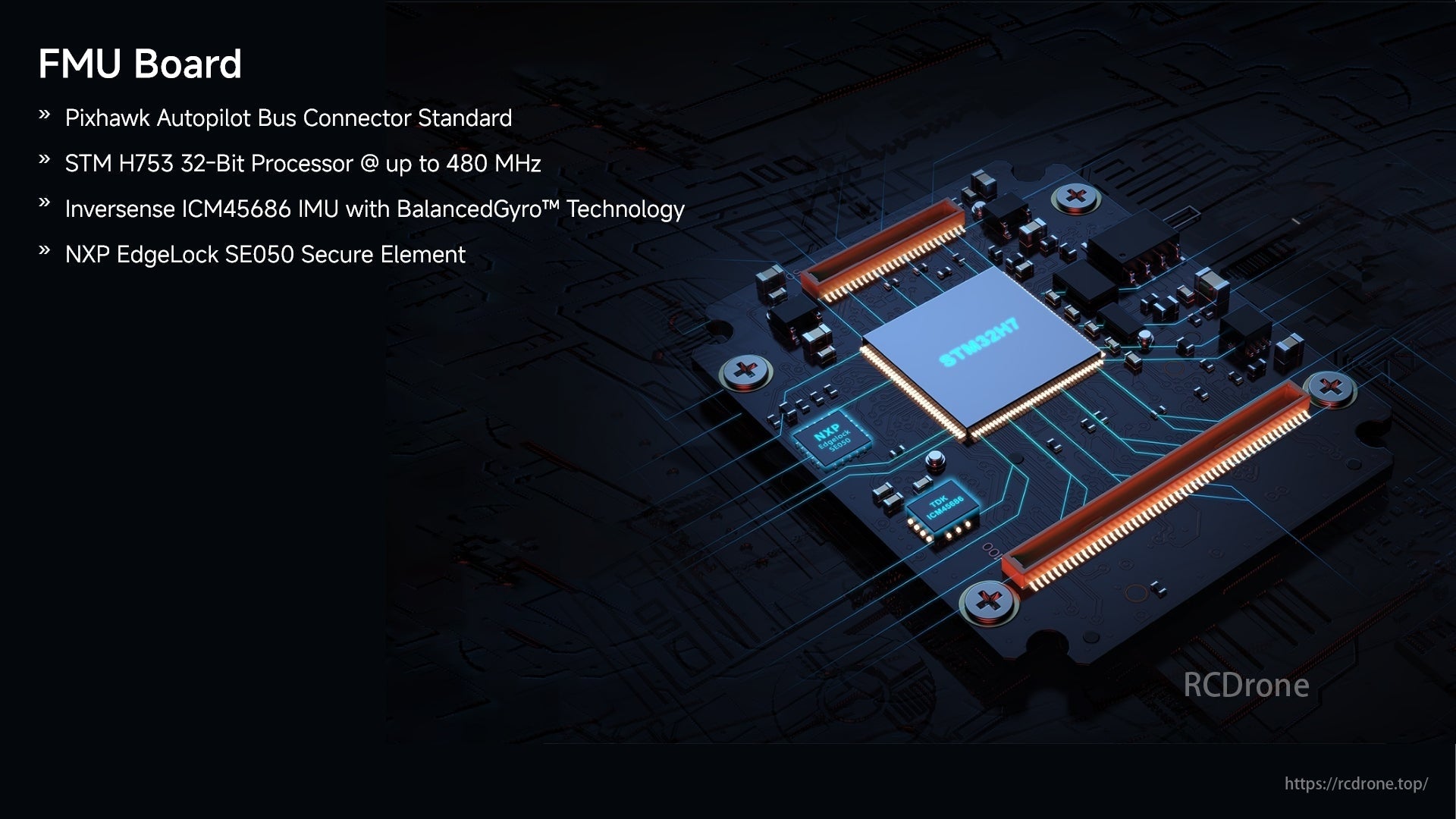
Плата FMU оснащена стандартним роз’ємом шини Pixhawk Autopilot, 32-розрядним процесором STM H753 до 480 МГц, IMU Inversense ICM45686 із технологією BalancedGyro та захищеним елементом NXP EdgeLock SE050.
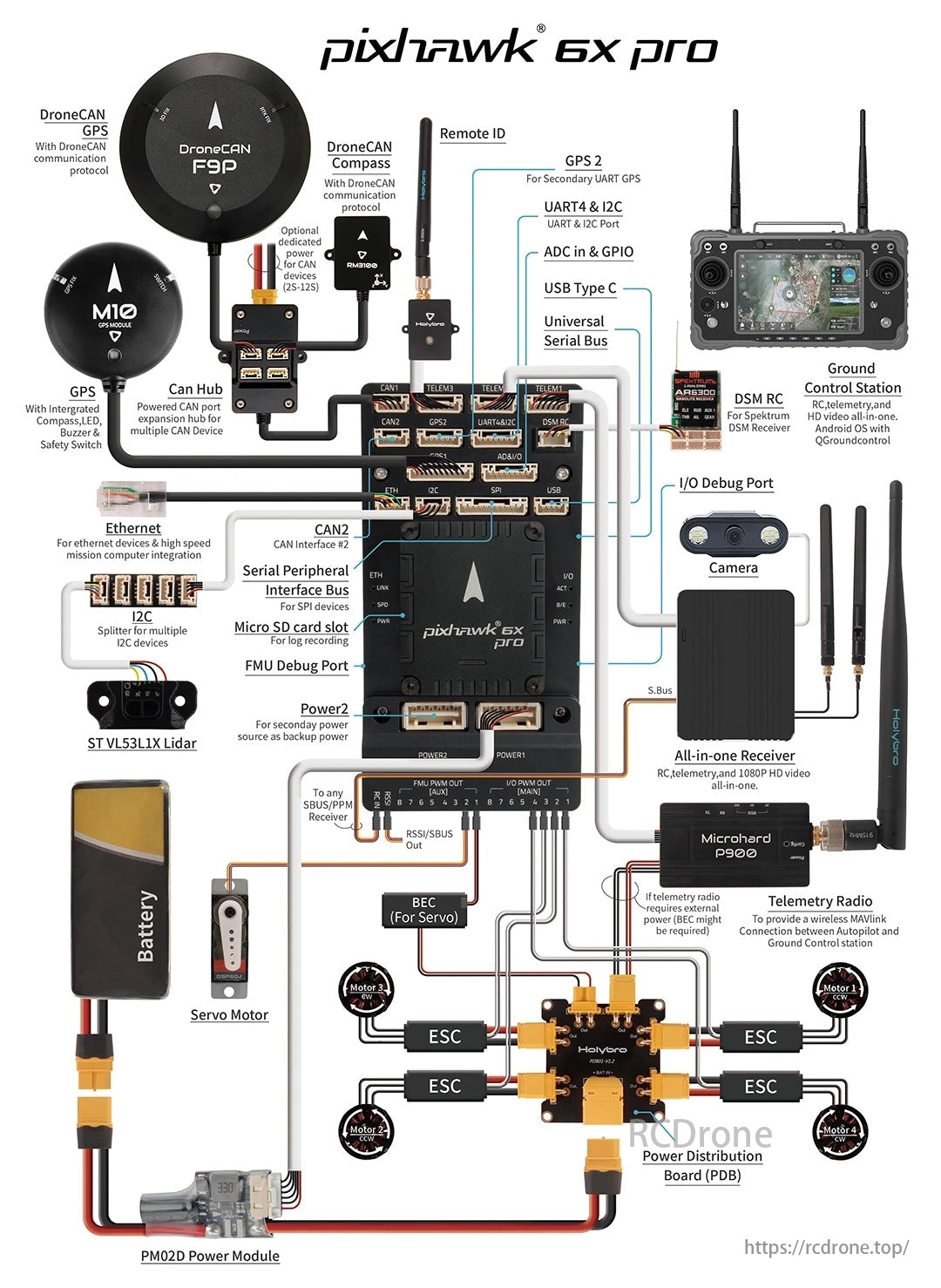
Схема Pixhawk 6X Pro ілюструє з’єднання для системи автопілота дрона, включаючи модулі GPS, компас, наземну станцію управління, камеру, телеметричне радіо, ESC, двигуни та розподільну плату. Для зв’язку між компонентами використовуються різні інтерфейси, такі як CAN, I2C, UART і USB.
Related Collections