Holybro Pixhawk 6X-RT - (версія для розробників) стандартний/міні-набір автопілотного контролера польоту
Holybro Pixhawk 6X-RT - (версія для розробників) стандартний/міні-набір автопілотного контролера польоту
HolyBro
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
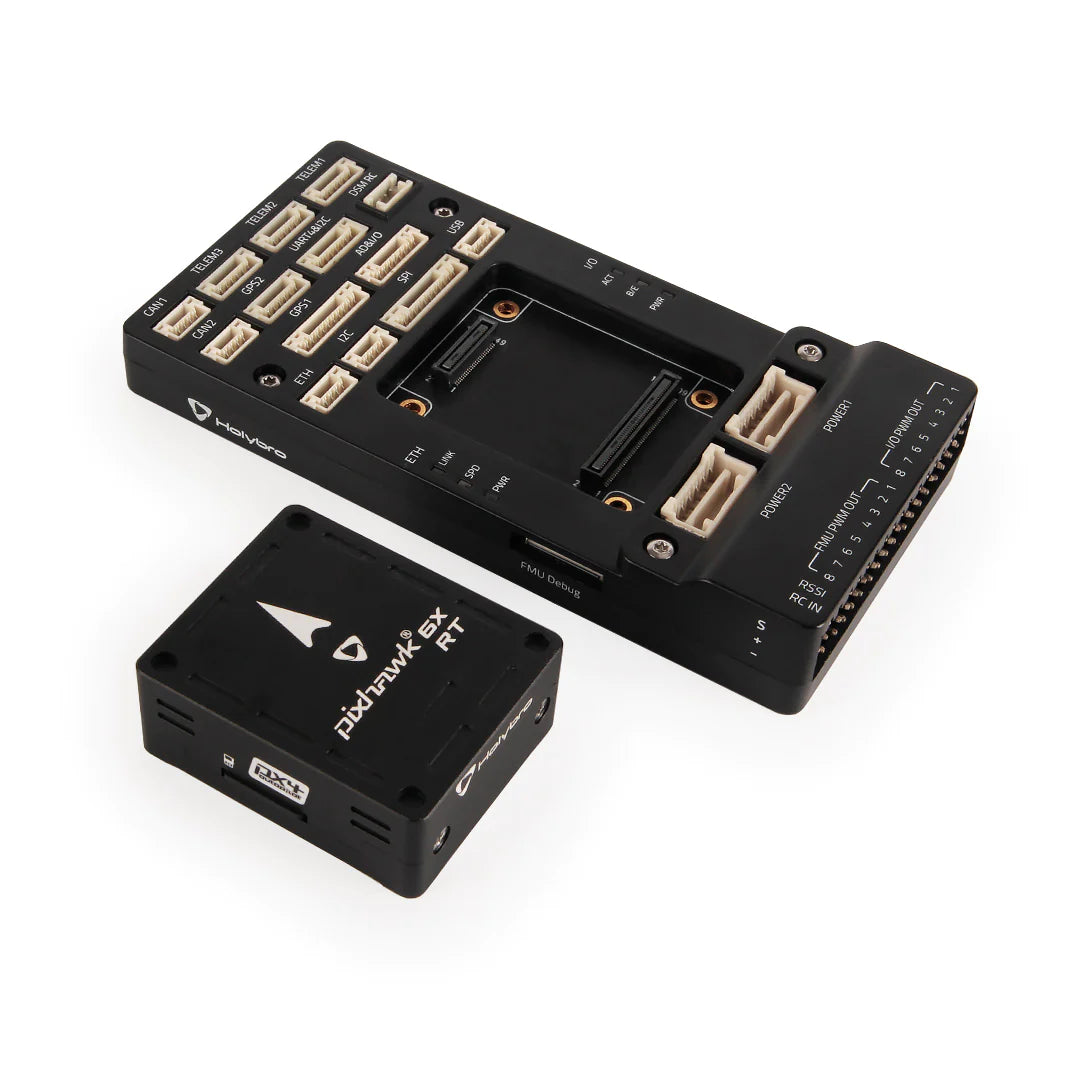
Pixhawk 6X-RT базується на відкритому стандарті Pixhawk® FMUv6X-RT і стандарті Pixhawk® Autopilot Bus. Він поставляється з попередньо встановленим PX4 Autopilot®. Усередині контролера польоту Pixhawk 6X-RT ви можете знайти мікроконтролер i.MXRT1176 на основі NXP у поєднанні з сенсорною технологією від Bosch® та InvenSense®, що забезпечує гнучкість і надійність керування будь-яким автономним транспортним засобом.
Мікроконтролер i.MXRT1176 містить Arm® Cortex-M7 на 1 ГГц і Cortex-M4 на 400 МГц. Він має 2 МБ SRAM і 64 МБ Octal SPI Flash. Завдяки оновленій обчислювальній потужності розробники можуть бути більш продуктивними та ефективними у своїй роботі над розробкою, дозволяючи створювати складні алгоритми та моделі.
Він містить високоефективні IMU з низьким рівнем шуму, розроблені для кращої стабілізації, а також має потрійні резервні IMU та подвійні резервні барометри на окремих шинах. Коли автопілот виявляє збій датчика, система плавно перемикається на інший, щоб підтримувати надійність керування польотом. Незалежний LDO живить кожен набір датчиків із незалежним керуванням живленням. Система віброізоляції для фільтрації високочастотної вібрації та зменшення шуму для забезпечення точних показань, що дозволяє транспортним засобам досягати кращих загальних характеристик польоту. Інтегрований Microchip Ethernet PHY, тепер можливий високошвидкісний зв'язок з комп'ютерами місії через Ethernet.
Pixhawk 6X-RT ідеально підходить для розробників у корпоративних дослідницьких лабораторіях, стартапах, науковцях (дослідниках, викладачах, студентах) і комерційних програмах. Цей контролер Flight сумісний з будь-якою базовою платою, яка використовує шину Pixhawk Autopilot, наприклад Pixhawk Baseboard, Pixhawk Mini Baseboard і Pixhawk RPi CM4 Baseboard.
Ключові моменти дизайну
- Високопродуктивний двоядерний процесор i.MXRT1176 із Cortex-M7 на 1 ГГц – Cortex-M4 на 400 МГц
- Модульний контролер польоту: розділені IMU, FMU та базова система, з’єднані 100-контактним і 50-контактним роз’ємом Pixhawk® Autopilot Bus.
- Резервування: 3 датчики IMU та 2 датчики барометра на окремих шинах
- Домени з потрійним резервуванням: повністю ізольовані домени датчиків з окремими шинами та окремим керуванням живленням
- Система віброізоляції для фільтрації високочастотної вібрації та зменшення шуму для забезпечення точних показань
- Інтерфейс Ethernet для високошвидкісної інтеграції комп'ютера місії
- Температура IMU контролюється вбудованими нагрівальними резисторами, що забезпечує оптимальну робочу температуру IMU
- Апаратний захисний елемент NXP EdgeLock SE051 розширення широкодовіреного сімейства захисних елементів EdgeLock SE050 Plug & Trust, підтримує оновлення аплетів на місці та забезпечує підтверджена безпека, сертифікована відповідно до CC EAL 6+, з AVA_VAN.5 до рівня ОС, для надійного захисту від останніх сценаріїв атак. Наприклад, для безпечного зберігання ID оператора
Примітка:
- Це видання для розробників для перших користувачів, поки ми продовжуємо накопичувати години льотних випробувань
- Цей польотний контролер наразі підтримується лише в PX4 Flight Stack. (Ціль мікропрограми: FMUv6xrt). Це не підтримується в Ardupilot.
- Цей польотний контролер використовує цифровий модуль живлення (такий самий, як Pixhawk 6X, повний список можна знайти тут) Порівняльна таблиця модулів живлення
Специфікація
-
MCU: i.MXRT1176
-
Cortex-M7 на 1 ГГц
-
Cortex-M4 на 400 МГц
-
2 МБ SRAM
-
64 МБ Octal SPI Flash
-
Процесор вводу-виведення: STM32F103
-
32 Bit Arm® Cortex®-M3, 72 МГц, 64 КБ SRAM
-
Бортові датчики
-
Прискорення/гіроскоп: BMI088
-
Прискорення/гіроскоп: ICM-42670-P
-
Прискорення/гіроскоп: ICM-42686-P
-
Маг.: BMM150
-
Барометр: 2x BMP388
- Апаратний елемент безпеки
- NXP EdgeLock SE051C2
- Інтерфейс SDHC
- 12-канальний ШІМ
- 8x UART
- 4x I2C
- 6x SPI
- 3x CAN-FD
- RMII 100M Ethernet
- USB
- Увімкнення програмного забезпечення з відкритим кодом
- Автопілот PX4
- NuttX RTOS
- Zephyr RTOS
Стандартний набір SKU20257/ Міні-набір SKU258 Включає:
-
Модуль польотного контролера Pixhawk 6X-RT
-
Стандартна база Pixhawk/міні база Pixhawk
- Модуль живлення високої напруги PM02D
-
Набір кабелів
Довідкове посилання:
- Інструкція з перепрошивки мікропрограми (Github)
- PX4 на NXP IMXRT1176 1 ГГц MCU - слайди презентації NXP
- i.MX RT1176 – сторінка продукту Crossover MCU 1 ГГц із ядрами Arm® Cortex®
- EdgeLock® SE051: перевірене, просте у використанні рішення безпеки Інтернету речей із підтримкою можливості оновлення та користувацьких аплетів
Related Collections