Комплект основної плати Holybro Pixhawk Jetson із 6X / 6X Pro та NVIDIA Jetson
Комплект основної плати Holybro Pixhawk Jetson із 6X / 6X Pro та NVIDIA Jetson
HolyBro
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
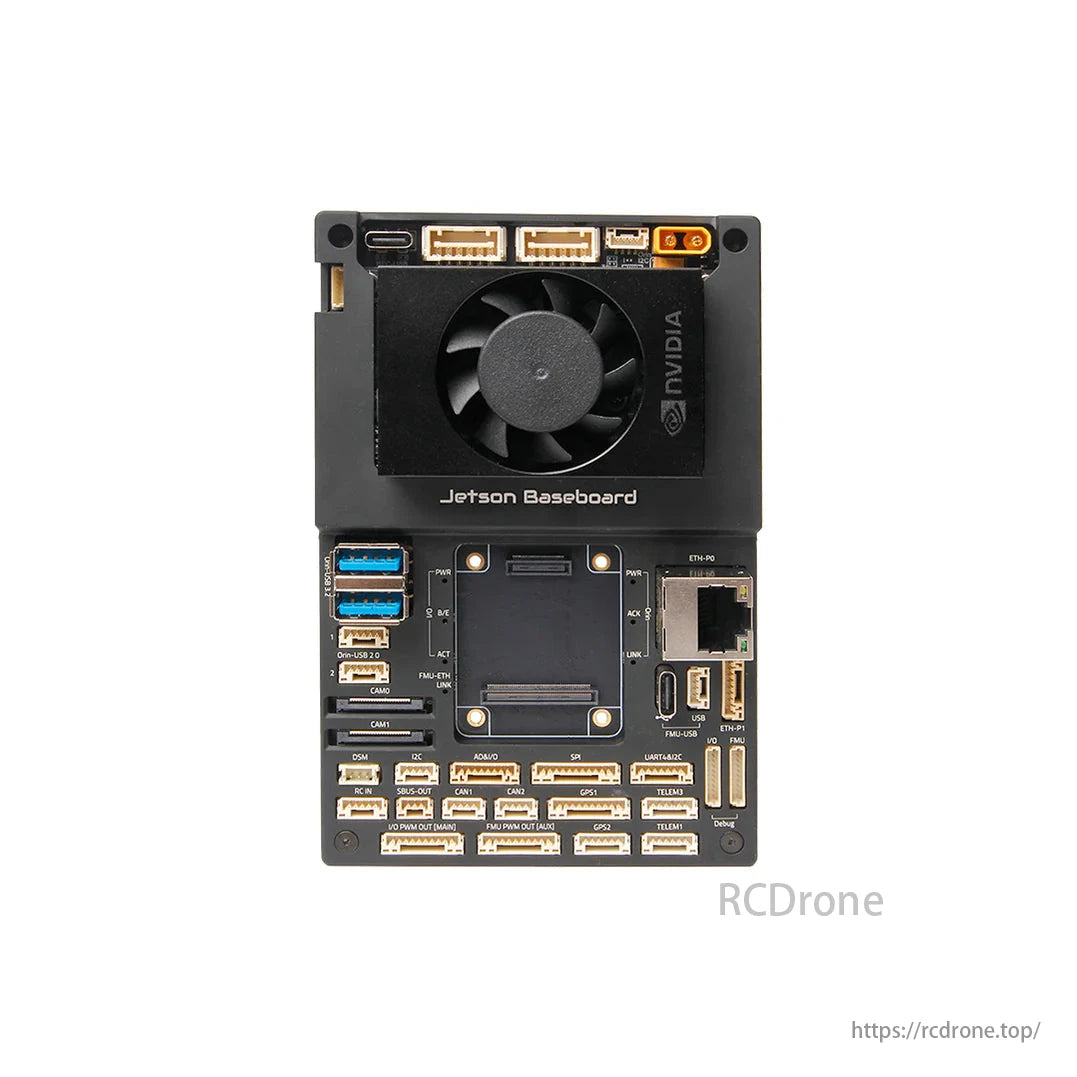
The Плінтус Holybro Pixhawk Jetson розроблений на основі Специфікація Pixhawk Autopilot Bus (PAB) з відкритим кодом і бездоганно інтегрується з NVIDIA Jetson Orin NX/Nano Carrier Board. The Форм-фактор PAB забезпечує сумісність з будь-яким контролером польоту PAB, включаючи Pixhawk 6X. Ця плата поєднує в собі обчислювальну потужність NVIDIA Jetson з можливостями керування польотом Pixhawk, що робить його ідеальним для розширених автономних програм.
Ключові характеристики
-
Єдина система: Комбайни Pixhawk і NVIDIA Jetson в одній дошці.
-
Безперебійне підключення: Джетсон і Піксхоук спілкуються через Перемикач UART, CAN і Ethernet.
-
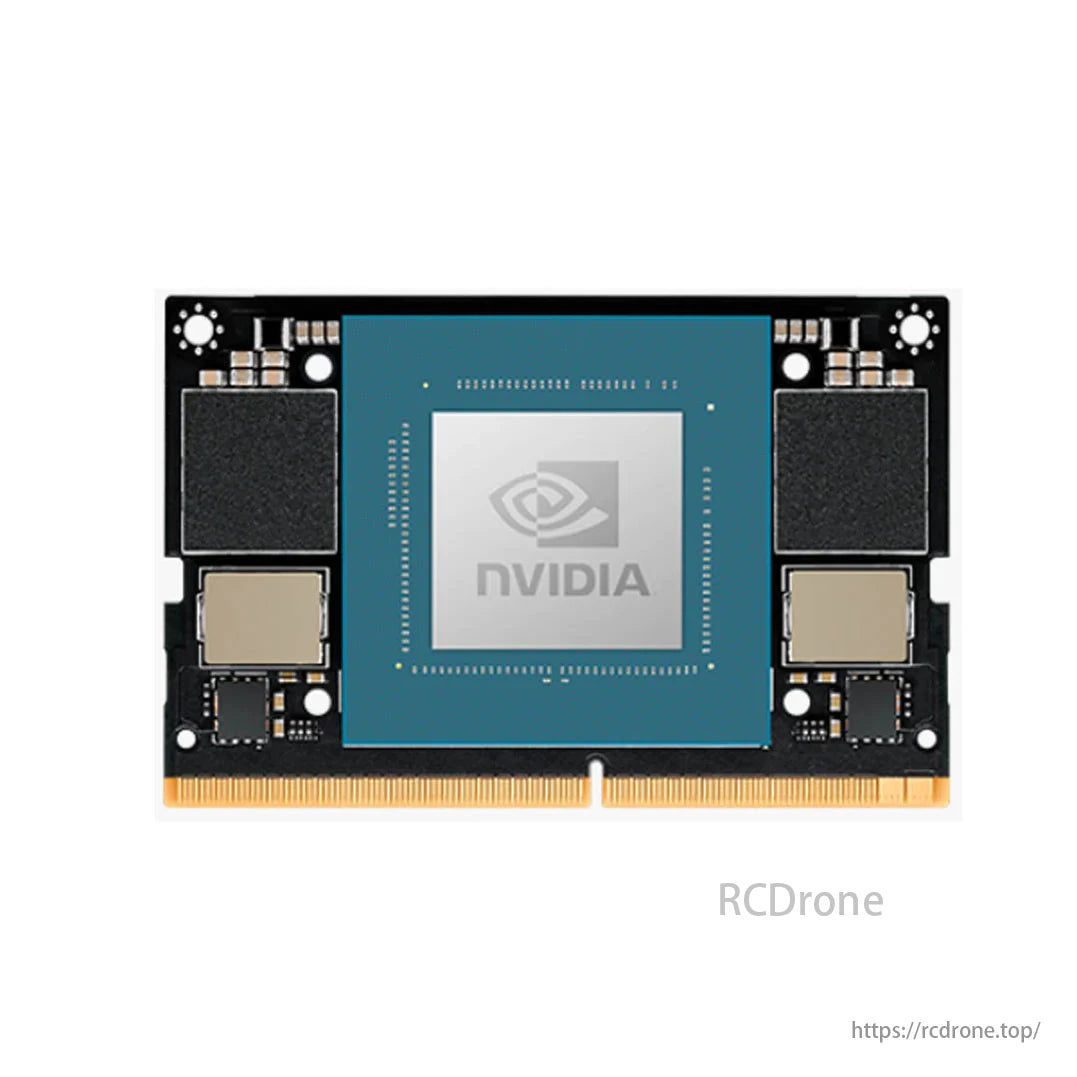
Широка сумісність: Підтримує Jetson Orin NX & Orin Nano.
-
Високошвидкісне розширення: особливості 2 слоти для клавіш M.2 для WiFi/Bluetooth і NVMe SSD.
-
Інтеграція Pixhawk 6X: Оснащений Датчики ICM-45686 для посиленого контролю польоту.
Процесори та датчики
Процесор FMU:
-
STM32H753
-
32-розрядний ARM Cortex-M7, 480 МГц
-
2 МБ флеш-пам'яті, 1 МБ ОЗУ
IO процесор:
-
STM32F103
-
32-розрядний ARM Cortex-M3, 72 МГц
-
64 КБ SRAM
Вбудовані датчики (версія 8)
-
Акселерометр/гіроскоп: 3x ICM-45686 (з технологією BalancedGyro™)
-
Барометр: ICP20100 і BMP388
-
Магнітометр: BMM150
Порти та підключення до основної плати
Роз'єми Jetson
-
2 порти Gigabit Ethernet (Підключено до Jetson & Autopilot через Ethernet комутатор RTL8367S)
-
2 входи камери MIPI CSI (4 смуги кожна, 22-контактний Raspberry Pi Cam FFC)
-
2 порти USB 3.0 (USB-A, обмеження струму 5A)
-
2x USB 2.0 портів хосту (5-контактний JST-GH)
-
USB 2.0 для налагодження (USB-C)
-
Міні вихід HDMI
-
2 слоти M.2:
-
Ключ M (2242) для NVMe SSD (PCIEx4)
-
Ключ E (2230) для WiFi/BT (PCIEx2, UART, USB, I2S)
-
-
Порт CAN (Підключений до Автопілот CAN2, 4-контактний JST-GH)
-
Порти SPI, I2C, I2S, UART (Різні роз'єми JST-GH)
-
Порт живлення вентилятора
-
Споживана потужність: Роз'єм XT30, 7-21 В (3S-4S)
-
UBEC 12A (3-14S) Рекомендовано для застосувань >4S
Роз'єми автопілота
-
Інтерфейс Pixhawk Autopilot Bus: 100- та 50-контактний Hirose DF40
-
Резервні входи цифрового модуля живлення
-
Підтримка I2C Power Monitor
-
Порти GPS і безпеки: 10-контактний і 6-контактний JST-GH
-
2 порти CAN (4-контактний JST-GH)
-
3 порти телеметрії (JST-GH, один підключений до UART1 Jetson)
-
16 виходів ШІМ (2x 10-контактний JST-GH)
-
USB 2.0 (USB-C і 4-контактний JST-GH)
-
Вхід DSM (3-контактний JST-ZH, крок 1,5 мм)
-
Вхід RC (PPM/SBUS, 5-контактний JST-GH)
-
Порт SPI для шини зовнішнього датчика (SPI5, 11-контактний JST-GH)
-
2 порти налагодження (FMU та IO, 10-контактний JST-SH)
Вимоги до живлення
-
Вхідна напруга: 7-21 В (3S-4S) через роз'єм XT30
-
Мінімальна вимога до потужності: 8 В/3 А (залежить від периферійних пристроїв)
-
Підтримує зовнішній UBEC 12A (3-14S) для резервування та додатків з високою напругою
-
Вбудований захист від перенапруги
Розміри та вага
-
Розмір плати: 126 x 80 x 38 мм (без Jetson і контролера польоту)
-
вага: 203.2г (Включаючи Jetson, радіатор, контролер польоту, SSD, модуль Wi-Fi)
Технічні характеристики UBEC-12A
-
Вхідна напруга: 3~14S (XT30)
-
Вихідна напруга: 6,0 В/7,2 В/8,0 В/9,2 В (7,2 В рекомендовано для Jetson)
-
Постійний вихідний струм: 12А
-
Вибуховий вихідний струм: 24А
-
розмір: 48 x 33,6 x 16,3 мм
-
вага: 47,8г
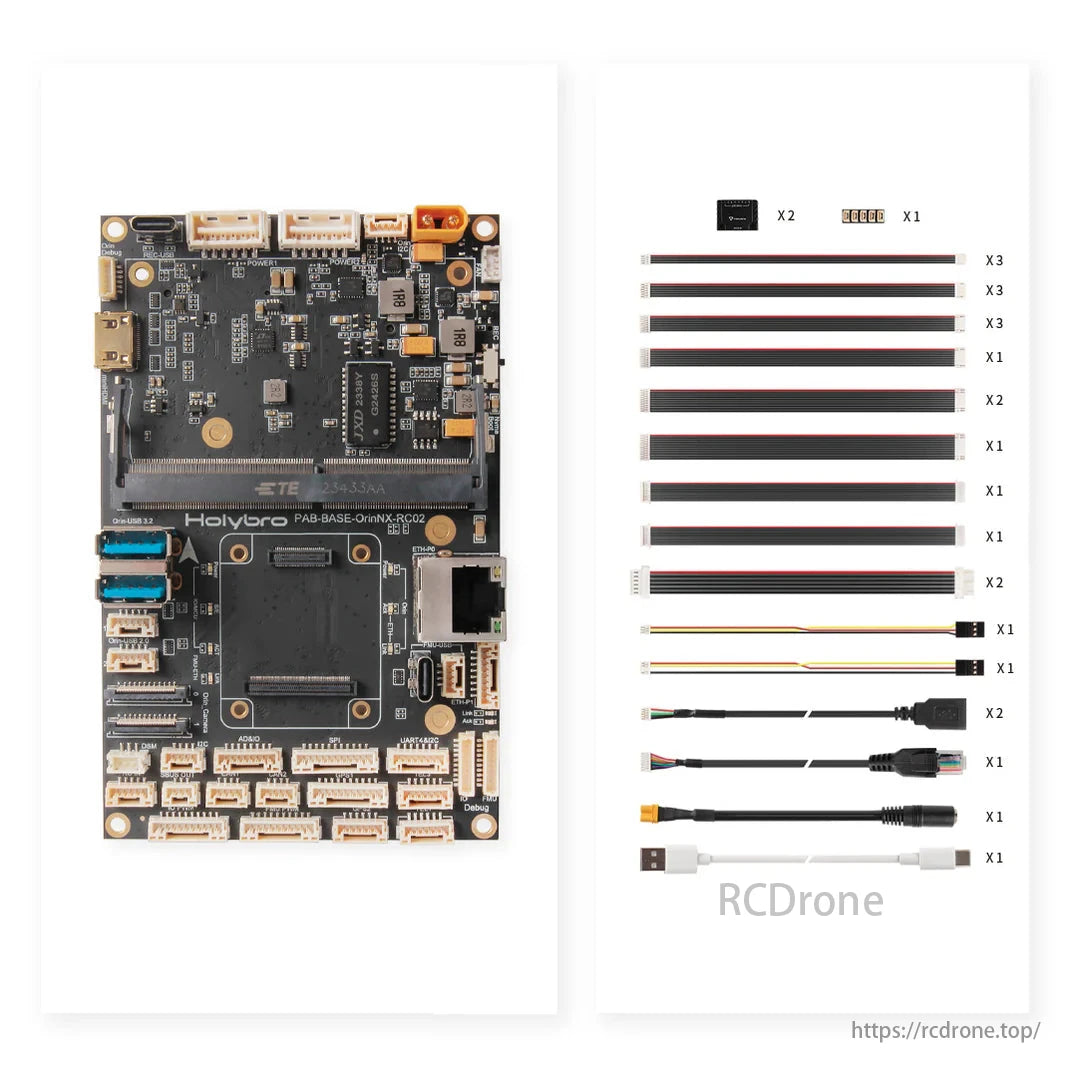
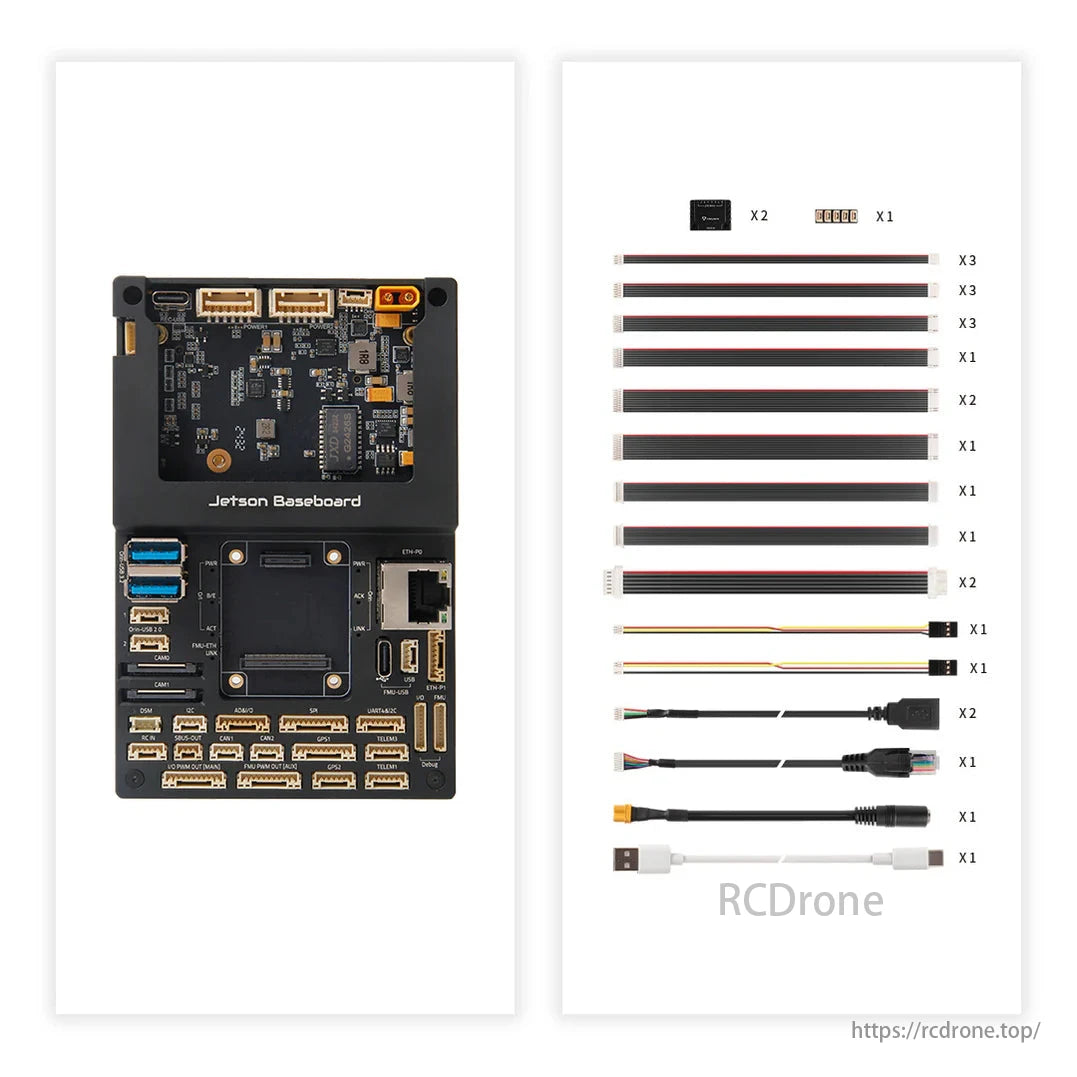
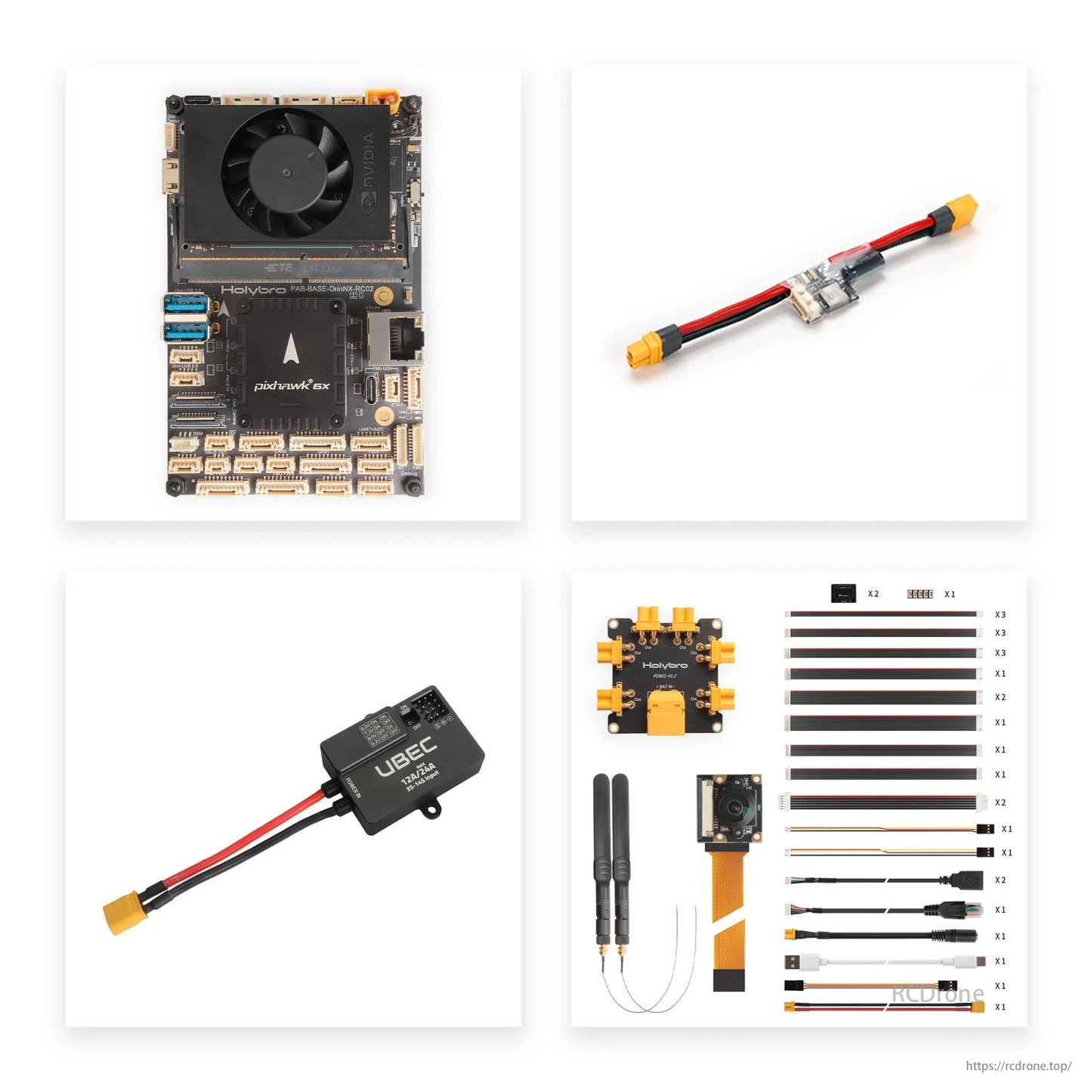
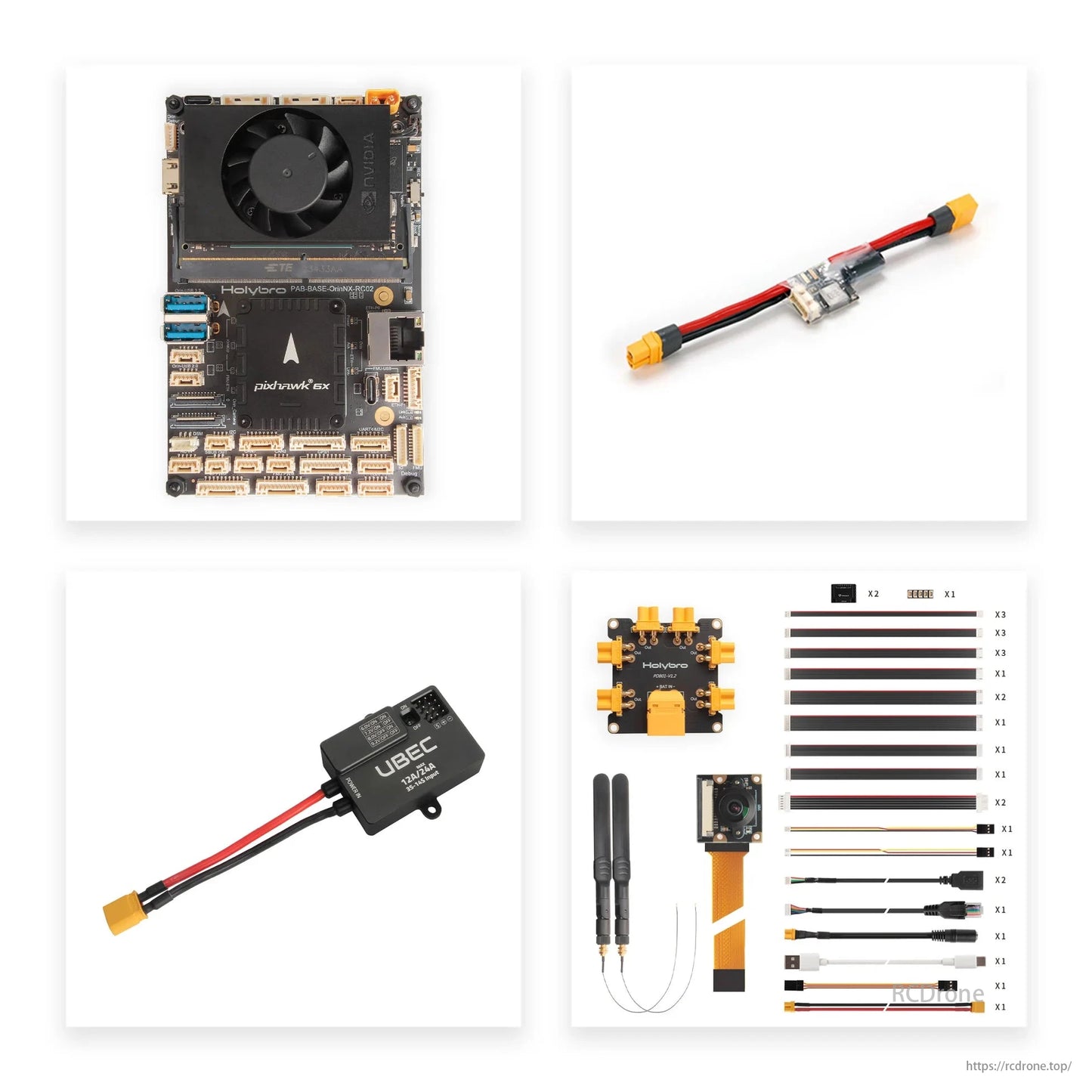
Вміст упаковки
Набір Pixhawk 6X
-
Модуль польотного контролера Pixhawk 6X (ICM-45686).
-
Плінтус Pixhawk Jetson Orin
-
Nvidia Orin NX (16 ГБ ОЗУ) / Orin Nano (4 ГБ ОЗУ) з радіатором і вентилятором
-
SSD: Samsung PM9B1 PCIe 4.0 NVMe 512 ГБ
-
Модуль Wi-Fi і Bluetooth: Intel 8265NGW AC Dual Band / Realtek RTL8B22CE
-
Камера: IMX219-200
-
Силовий модуль PM02D
-
UBEC 12A (3-14S)
-
Плата PDB і набір кабелів
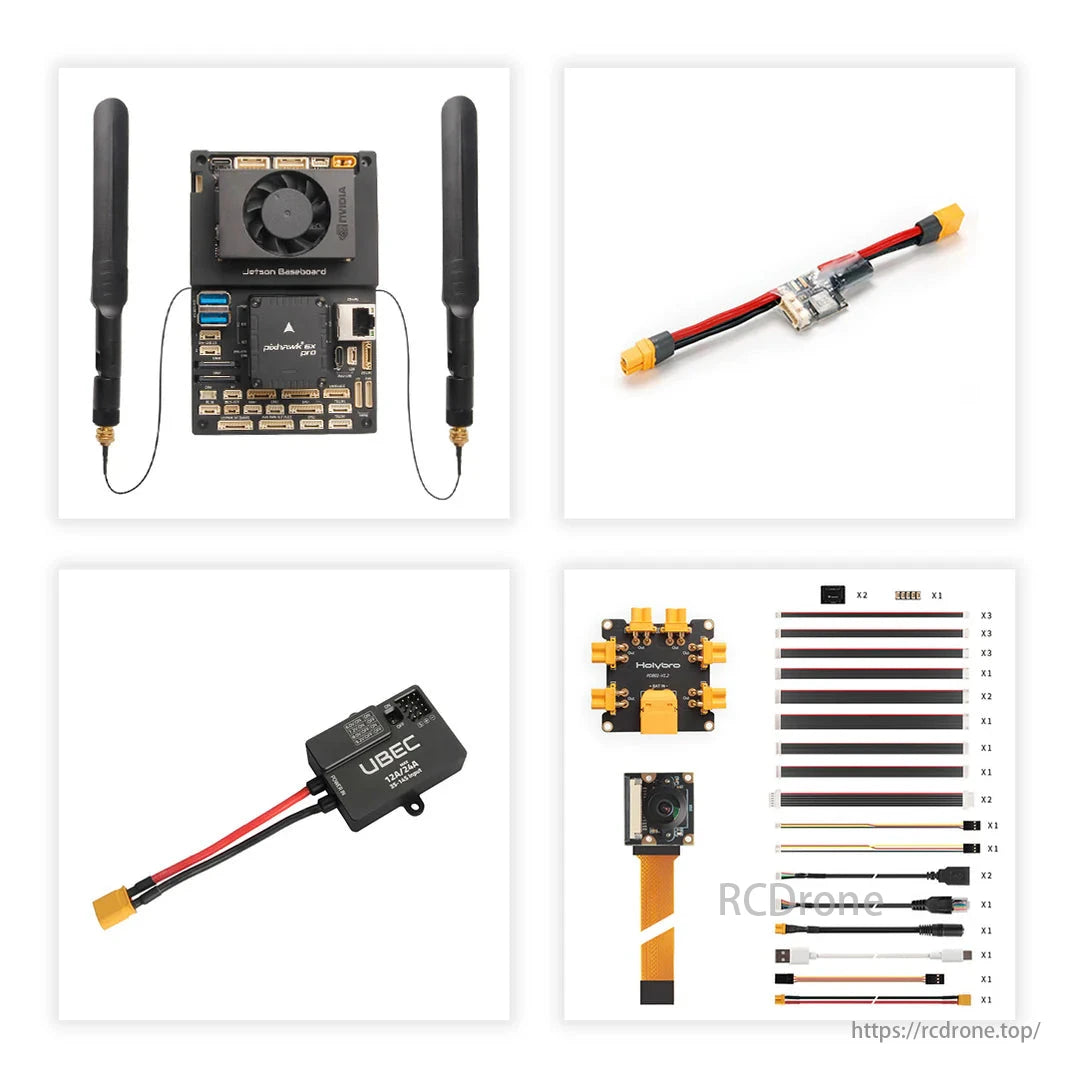
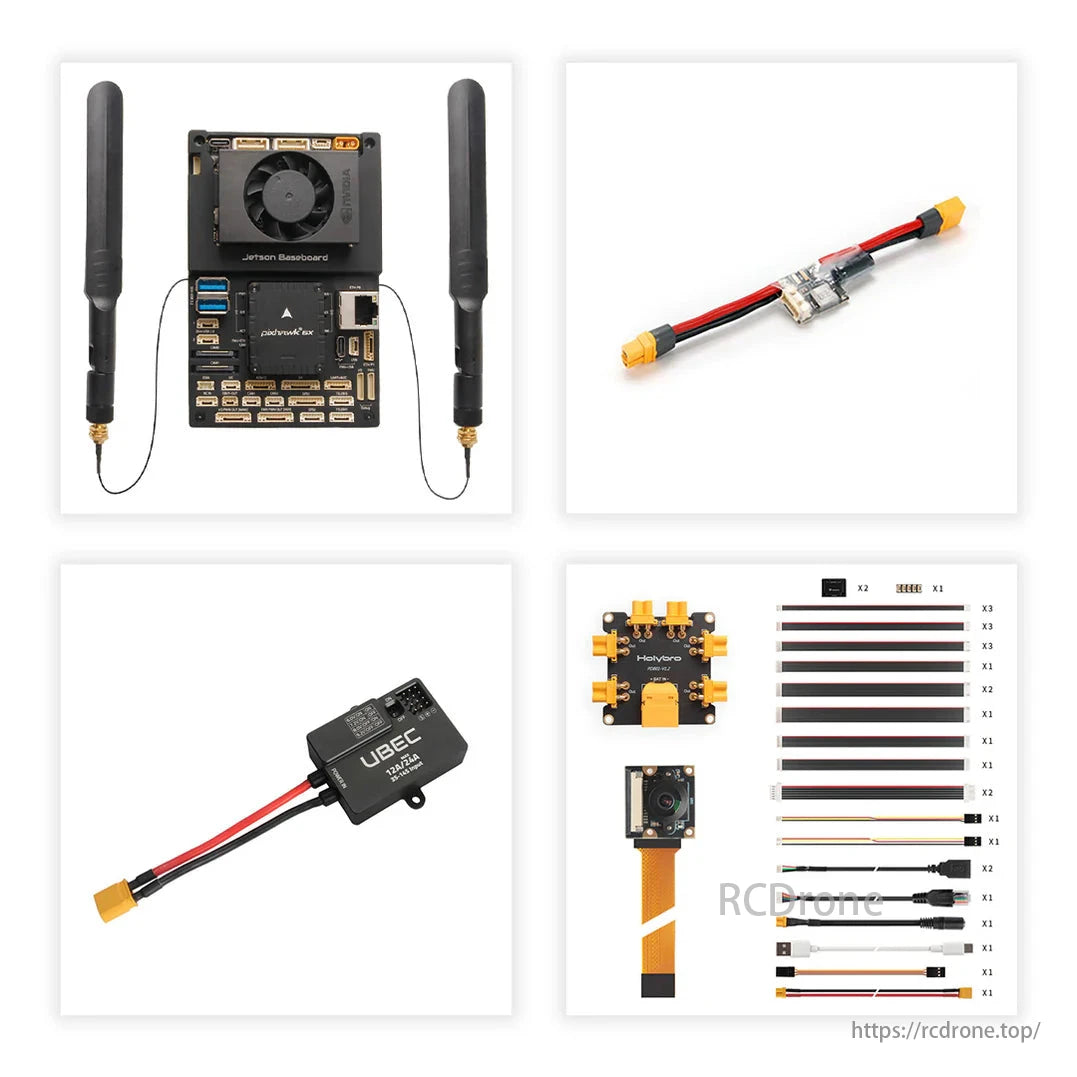
Комплект Pixhawk 6X Pro
-
Модуль польотного контролера Pixhawk 6X Pro
-
Pixhawk Jetson Orin Baseboard (без або без корпусу)
-
Nvidia Orin NX (16 ГБ ОЗУ) / Orin Nano (4 ГБ ОЗУ) з радіатором і вентилятором
-
SSD, модуль Wi-Fi/Bluetooth, камера, модуль живлення PM02D, UBEC 12A, плата PDB, комплект кабелів
Лише плінтус Jetson
-
Pixhawk Jetson Orin Baseboard (без або без корпусу)
-
Набір кабелів
Довідкові посилання
Облікові дані для входу за замовчуванням для Jetson Orin:
-
ID:
holybro -
Пароль:
123
Подробиці




Pixhawk і Nvidia Jetson об'єднані на одній платі.

Nvidia jetson підключено через uart can і комутатор Ethernet за допомогою роз’єму rj45 для систем автопілота
Специфікація відкритого вихідного коду Pixhawk Autopilot Bus (PAB).

Jetson SoDIMM Connector System Повністю сумісна: Jetson Orin NX/Nano

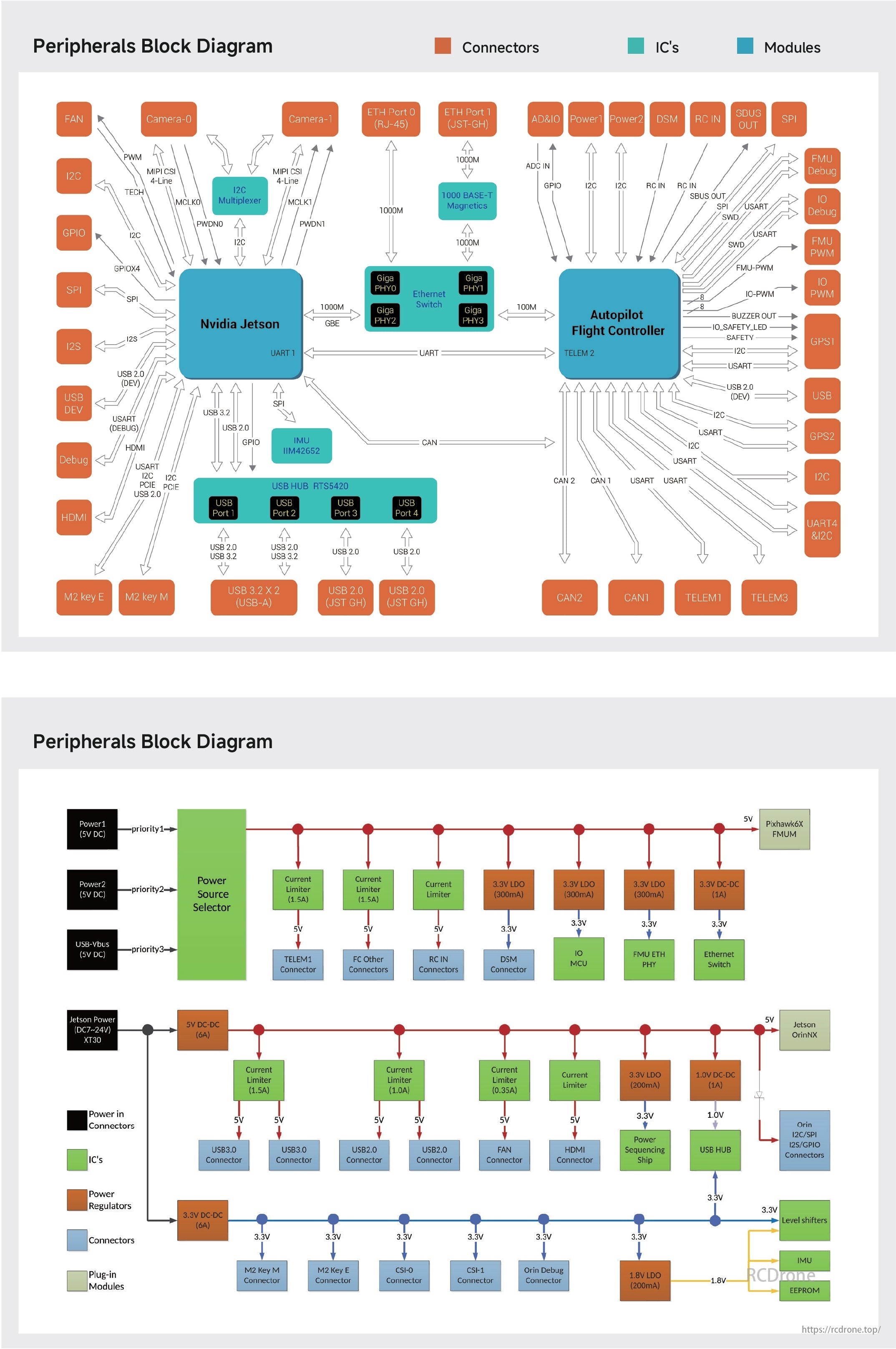
На зображенні зображено блок-схему периферійних пристроїв для вбудованої системи, що містить такі компоненти, як Nvidia Jetson і Autopilot Flight Controller. Він містить різні роз’єми, мікросхеми та модулі, такі як порти USB, комутатори Ethernet і регулятори потужності, що ілюструє їх взаємозв’язки та потік даних.
Довідкова схема підключення

Дві діаграми ілюструють системи розподілу електроенергії для модуля Jetson з використанням однієї батареї. На лівій схемі використовується модуль живлення PM02D і плата розподілу живлення, а на правій схемі — зовнішній UBEC для батарей потужністю понад 4S.Обидві установки забезпечують належне регулювання напруги для Jetson і Pixhawk Power.
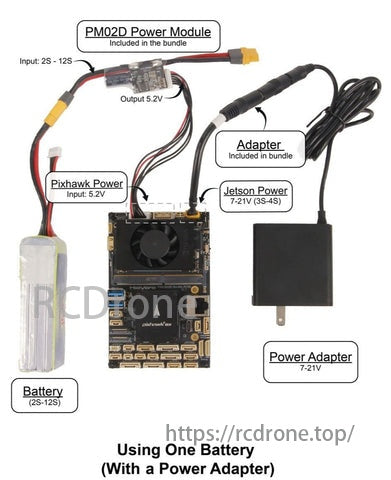
Модуль живлення PM02D підключає батарею до Pixhawk і Jetson, використовуючи одну батарею з адаптером живлення для входу 7-21 В.
Related Collections