


Dexterous Robot Hand Inspire Robots RH56DFTP – 6 ступенів свободи, захват 30Н, тактильні & датчики сили, керування ModbusTCP+CAN
Dexterous Robot Hand Inspire Robots RH56DFTP – 6 ступенів свободи, захват 30Н, тактильні & датчики сили, керування ModbusTCP+CAN
Inspire Robots
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
Інтелектуальна біонічна рука Inspire Robots RH56DFTP є високоточним, п'ятипальцевим маніпулятором, призначеним для передових робототехнічних застосувань. Вона має 6 ступенів свободи, 12 суглобів та поєднання 6 датчиків сили і 17 тактильних датчиків, що забезпечує людську точність і тактильне сприйняття. З силою на кінчику пальця 30N (≈3 кг на палець), високошвидкісним кутовим рухом і безшовним ModbusTCP+CAN (RS485) зв'язком, ця рука ідеально підходить для досліджень, промислової автоматизації та біонічної робототехніки.
Ключові особливості
-
Людська тактильна точність: Інтегровані тактильні датчики забезпечують сприйняття в реальному часі для точного маніпулювання об'єктами.
-
Сильний і стабільний захват: Кожен палець забезпечує до 3 кг сили активації, що дозволяє надійно захоплювати різні об'єкти.
-
Автоматичне блокування при втраті живлення: Зберігає позицію при вимкненні живлення, усуваючи необхідність повторного нульового налаштування при запуску.
-
Високошвидкісна робота: Рух великого пальця перевищує 130°/с, тоді як рух чотирьох пальців досягає 200°/с для чутливого управління.
-
Довговічний та надійний: Створений для тривалого використання в дослідницьких лабораторіях, роботизованих платформах та промислових середовищах.
Специфікації
| Параметр | Значення |
|---|---|
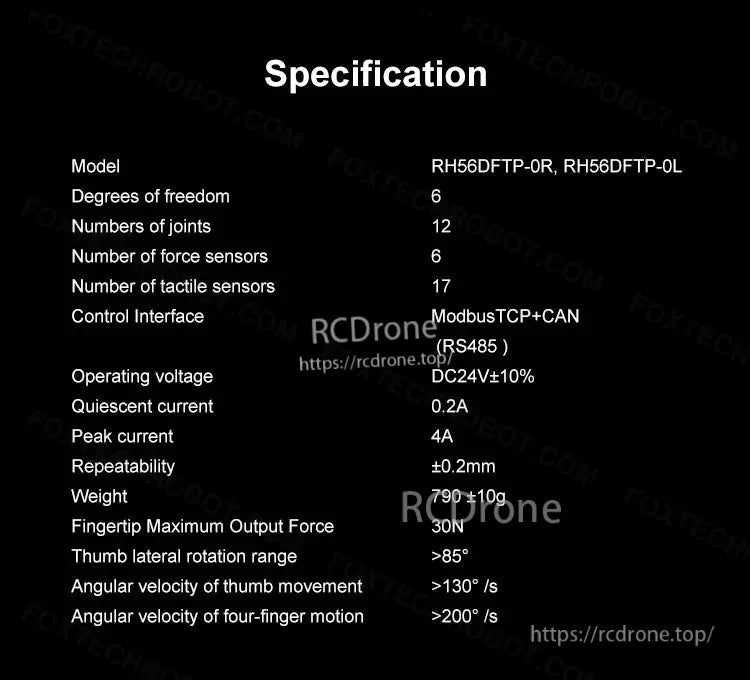
| Модель | RH56DFTP-0R, RH56DFTP-0L |
| Ступені свободи | 6 |
| Кількість суглобів | 12 |
| Датчики сили | 6 |
| Датчики дотику | 17 |
| Інтерфейс управління | ModbusTCP + CAN (RS485) |
| Робоча напруга | DC 24V ±10% |
| Струм в стані спокою | 0.2A |
| Піковий струм | 4A |
| Повторюваність | ±0.2мм |
| Вага | 790г ±10г |
| Максимальна сила виводу на кінчику пальця | 30Н (≈3 кг) |
| Діапазон бічного обертання великого пальця | >85° |
| Кутова швидкість – великий палець | >130°/с |
| Кутова швидкість – чотири пальці | >200°/с |
Застосування
-
Дослідження та Розробка: Дослідження в галузі передової робототехніки в університетах та лабораторіях.
-
Промислова Автоматизація: Завдання високоточної збірки та обробки.
-
Біонічні Рішення: Дослідження протезування рук та гуманоїдної робототехніки.
-
Штучний Інтелект та Машинне Навчання: Проекти тактильного сприйняття та маніпуляції, що вимагають точного зворотного зв'язку в реальному часі.
Основні характеристики
RH56DFTP відзначається в завданнях, які вимагають точного контролю сили та делікатних операцій, таких як збір чорниць, червоних помідорів або винограду без пошкоджень. Він також справляється з високою силою захоплення для надійних промислових застосувань, що робить його універсальним рішенням для складних маніпуляційних завдань.
Деталі
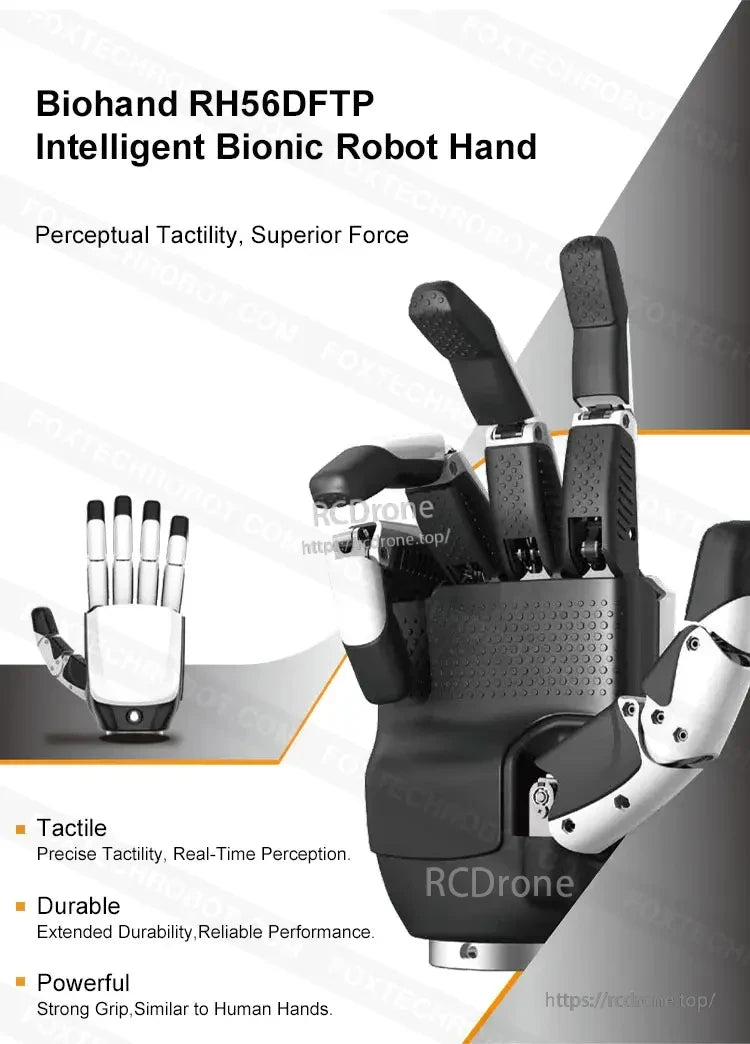
Інтелектуальна біонічна рука Biohand RHS6DFTP пропонує сприйнятливу тактильність, вищу силу та точну тактильність в реальному часі, з тривалою надійністю для стабільної роботи та потужним сильним захопленням, подібним до людських рук.

Роботизована рука з шістьма ступенями свободи, розроблена для точності та спритності, ідеально підходить для різних застосувань, таких як хірургія, складання або лабораторна робота.

Потужне захоплення, продуктивність, подібна до людської. Сила активації 3 кг на палець. dexterous robot hand with advanced design and precision engineering.


Механізм самозамикання при втраті потужності утримує позицію стабільною та надійною без необхідності повторного нульового налаштування при запуску або вимкненні.


Багатофункціональний інструмент з сенсором сили, підходить для збору та щипання маленьких фруктів, таких як чорниця, червоні помідори та виноград.

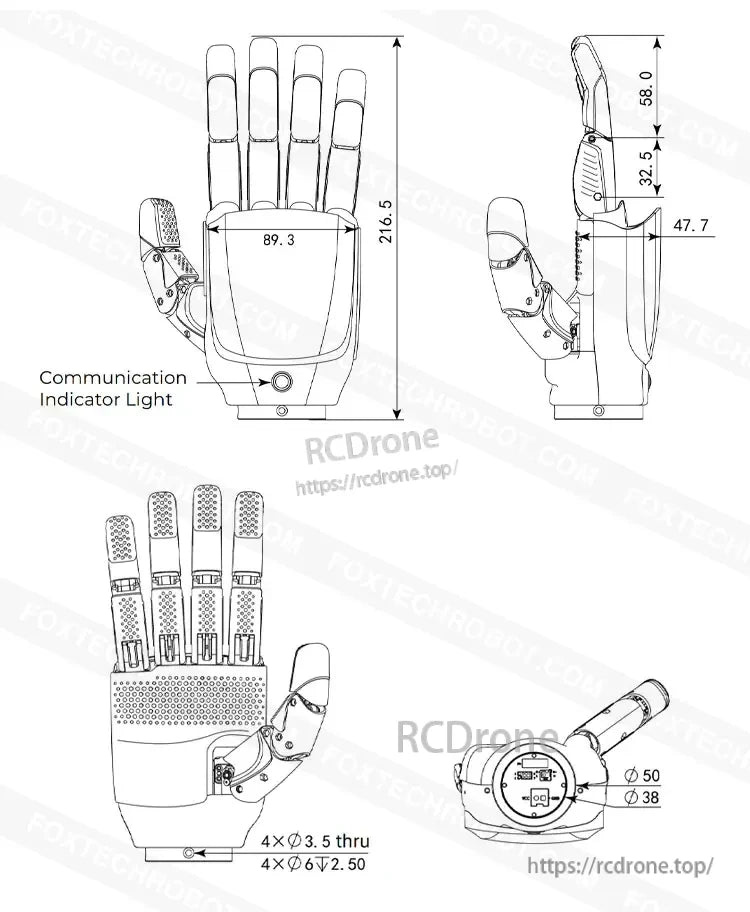
Індикатор зв'язку, 8 x 47.7 мм, 89 мм в довжину, без світлодіода, 5x5: 38-4x03.5 до 4xp6v2, 50 Ом, 2 шари
Модель специфікації RHS6DFTP-OR та RHS6DFTP-OL має 3 ступені свободи, 12 суглобів та 17 сенсорів сили і тактильних сенсорів. Вона використовує інтерфейс керування Modbus TCP+CAN (RS485) з робочою напругою DC24V +10%.



Related Collections


