













LINKERBOT Лінкер-рука L10, 10 ступенів свободи, керування CAN/RS485, черв'ячна передача, сила захвату 80Н, DC24V+/-10%
LINKERBOT Лінкер-рука L10, 10 ступенів свободи, керування CAN/RS485, черв'ячна передача, сила захвату 80Н, DC24V+/-10%
LINKERBOT
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
LINKERBOT Linker Hand L10 - це роботизована рука, розроблена для досконалого маніпулювання та точного контролю. Вона має 10 ступенів свободи з черв'ячною передачею та спілкується через CAN/RS485 для надійної інтеграції в дослідницькі та промислові системи.
Ключові особливості
- 10 DoF досконала рука з черв'ячною передачею для стабільного приводу.
- Інтерфейси управління: CAN та RS485.
- Точність повторного позиціонування < +/-0.2mm; типовий час відкриття/закриття 1.2s.
- Сила: максимальна сила на кінчику великого пальця 15N, максимальна сила на кінчику чотирьох пальців 15N, максимальна сила захоплення п'яти пальців 80N.
- Режими управління та утиліти з інструкції до продукту: управління положенням, управління швидкістю, тактильний зворотний зв'язок (управління силою) через сенсори на кінчиках пальців та онлайн-оновлення прошивки.
- Екосистема (матеріали для продуктів): підтримувані роботизовані руки UR, Franka, XArm, RealMan, AgileX; підтримувані симулятори Pybullet, Isaac, MuJoCo; приклади використання включають ROS1, ROS2, Python, C++; методи збору даних включають телопераційні рукавички, екзоскелетні рукавички, рукавички з рідким металом, зір та VR (Meta Quest 3).
Для попередніх продажів або підтримки інтеграції, зв'яжіться з [email protected] or відвідайте https://rcdrone.top/.
Специфікації
| Кількість ступенів свободи (DoF) | 10 |
| Кількість суглобів | 20 (10 активних + 10 пасивних) |
| Режим передачі | Передача черв'ячного типу |
| Інтерфейс управління | CAN/RS485 |
| Вага | 800г |
| Максимальне навантаження | 25кг |
| Робоча напруга | DC24V+/-10% |
| Статичний струм | 0.2A |
| Середній струм (рух без навантаження) | 0.5A |
| Максимальний струм | 3A |
| Точність повторного позиціонування | < +/-0.2mm |
| Час відкриття/закриття | 1.2s |
| Максимальна сила на кінчику великого пальця | 15N |
| Максимальна сила на кінчиках чотирьох пальців | 15N |
| Максимальна сила захоплення п'яти пальців | 80N |
Датчик тиску
| П'єзорезистивний масив | 6*12 |
| Площа навантаження датчика | 9.6*14.4мм |
| Сила спуску | 5г |
| Діапазон вимірювання | 20Н |
| Термін служби | 100,000 циклів |
| Частота передачі даних | 200FPS |
Ємнісний датчик (додатково)
| Частота вибірки | >=50Гц |
| Діапазон вимірювання | 0-30Н |
| Граничне навантаження | 60Н |
| Чутливість до тиску | 0.1Н |
| Роздільна здатність вимірювання | 0.5%FS |
| Точність вимірювання | 2%FS |
| Роздільна здатність тиску | 0.25N |
| Роздільна здатність напрямку | 45° |
| Відстань виявлення | 1 см (метал, людське тіло) |
Що входить до комплекту
- USB-to-CAN налагоджувальний кабель x1
- З'єднувальний кабель XT30 (2+2) x1
- Блок живлення x1
- Кабель живлення x1
- З'єднувач Hand L10 x1
Застосування
- Дослідження та навчання в області маніпуляцій з використанням ROS1/ROS2 та симуляторів (Pybullet, Isaac, MuJoCo).
- Телеправління через рукавички, екзоскелетні рукавички, рукавички з рідким металом, зорові та VR (Meta Quest 3).
- Точна збірка, операції на основі траєкторії, затягування гвинтів, захоплення тонких листів та загальне оброблення об'єктів.
Посібники
Linker_Hand_L10_Product_Manual.pdf
Деталі

Linker Hand L10 пропонує 10 DOF, точний рух завдяки механізму зчеплення та індивідуальним драйверам моторів. Підтримує UR, Franka, ROS, Python, VR, Pybullet, CAN та інші для універсальної інтеграції та контролю роботів.
Linker Hand L10 забезпечує високу дексичність, кожен палець має 4 ступені свободи для точних операцій. Його багатосенсорна система, оснащена камерами та електронною шкірою, забезпечує всебічну обізнаність про навколишнє середовище та адаптивну взаємодію. Завдяки інтеграції з хмарою, користувачі можуть швидко розгорнути руку через безкодову бібліотеку навичок хмарного сервісу, що дозволяє ефективно налаштовувати, зменшуючи при цьому складність експлуатації. Разом ці можливості підтримують широкий спектр складних застосувань, підвищуючи як точність, так і зручність використання без необхідності в обширному програмуванні чи налаштуванні.

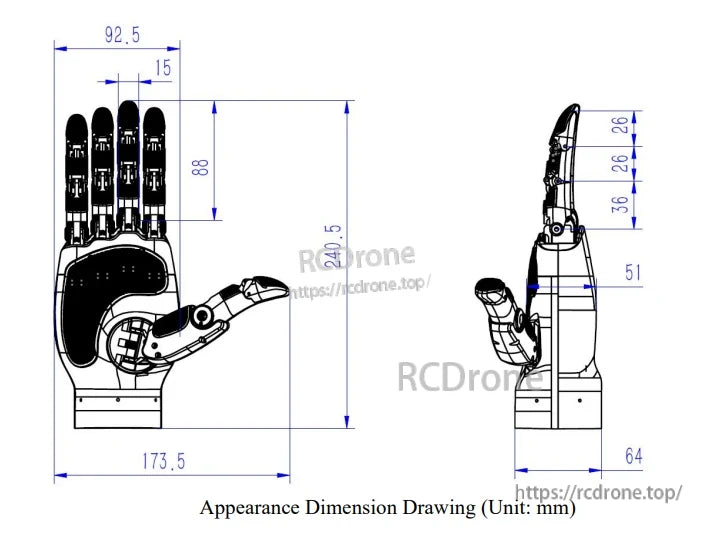
Розміри роботизованої руки в міліметрах, що показують передній та боковий вигляди з точними вимірюваннями для проектування та складання.
Linker Hand L10B пропонує точний контроль позиції та швидкості, тактильний зворотний зв'язок для управління силою та онлайн-оновлення прошивки. Розроблений для точності, безпеки та адаптивності в промислових та дослідницьких застосуваннях, що вимагають тонкого маніпулювання та тривалої продуктивності.
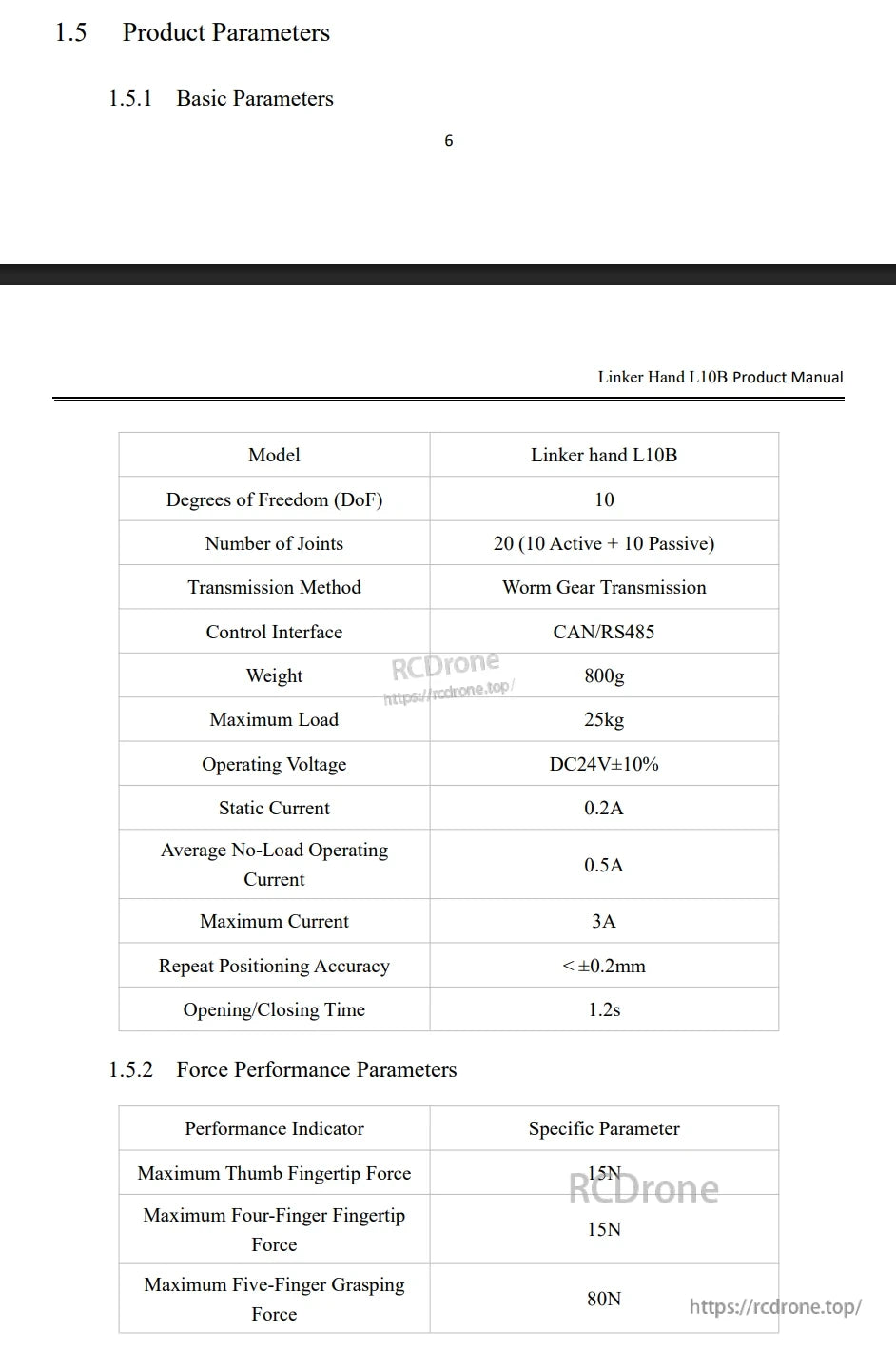
Linker Hand L10B пропонує 10 ступенів свободи, 20 суглобів, черв'ячну передачу та управління CAN/RS485. Вага 800 г, витримує до 25 кг при DC24V, забезпечуючи точне позиціонування та сили захоплення до 80N.

Має п'єзорезистивний масив 6x12 (діапазон 20N, 100k циклів). Додатковий ємнісний датчик: ≥50Hz дискретизація, діапазон 0–30N, роздільна здатність напрямку 45°, виявляє метал або людське тіло на відстані 1 см.
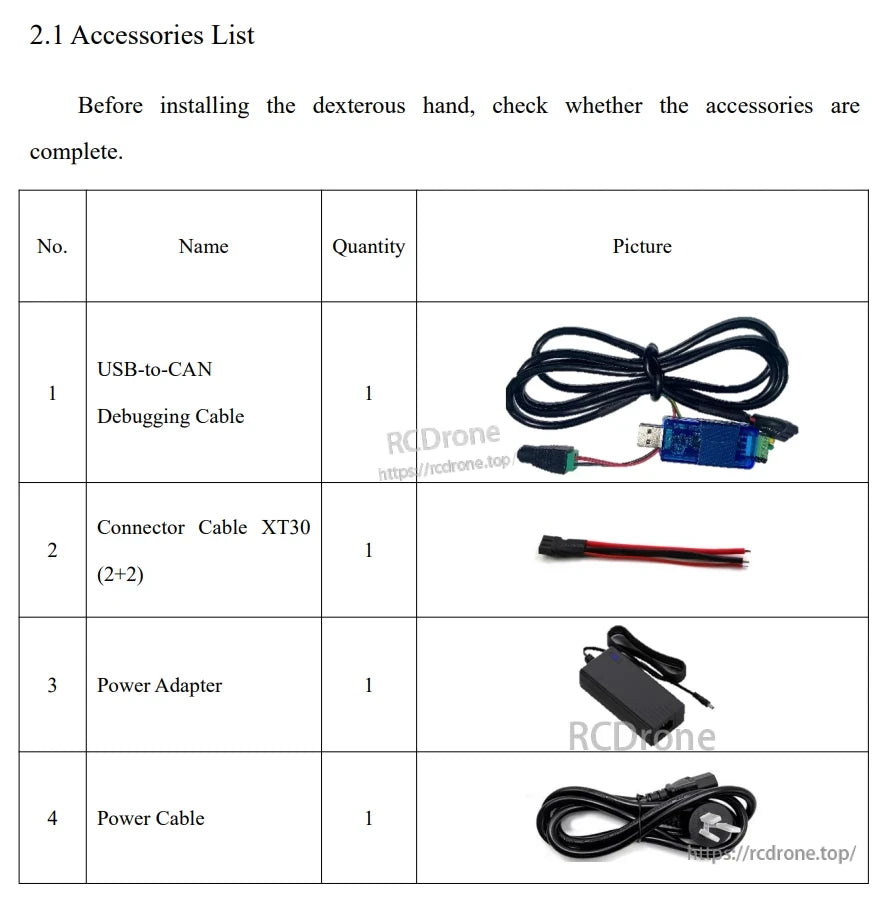
Список аксесуарів для установки маніпулятора: USB-to-CAN кабель, XT30 роз'єм, адаптер живлення та кабель живлення, кожен в кількості один.
Related Collections













